一种方向盘的位姿调节方法、装置、电子设备和存储介质与流程
本申请涉及车辆,更具体地说,涉及一种方向盘的位姿调节方法、装置、电子设备和存储介质。
背景技术:
1、车辆的方向盘用于操纵车辆的方向,其在车辆的驾驶过程中全程参与,因此驾驶员需要使其在自己的驾驶过程中处于一个较为舒适的位置。因为驾驶员本身体型差异较大,无法以一种长度或角度满足不同体型驾驶员的驾驶要求,因此一般车辆上的方向盘都会有能够调节长度和角度的位姿调节装置,但现在的位姿调节设备只能通过手动方式调节,无法满足驾驶员自动调节的要求,导致驾驶体验较差。
技术实现思路
1、有鉴于此,本申请提供一种方向盘的位姿调节方法、装置、电子设备和存储介质,用于满足驾驶员自动调节方向盘的位姿的要求,以提高驾驶体验。
2、为了实现上述目的,现提出的方案如下:
3、一种方向盘的位姿调节方法,应用于电子设备,所述方向盘设置有轴向驱动部件和角度驱动部件,所述轴向驱动部件用于驱动所述反向盘的管柱的伸缩,所述角度驱动部件用于驱动所述管柱的角度变换,所述位姿调节方法包括步骤:
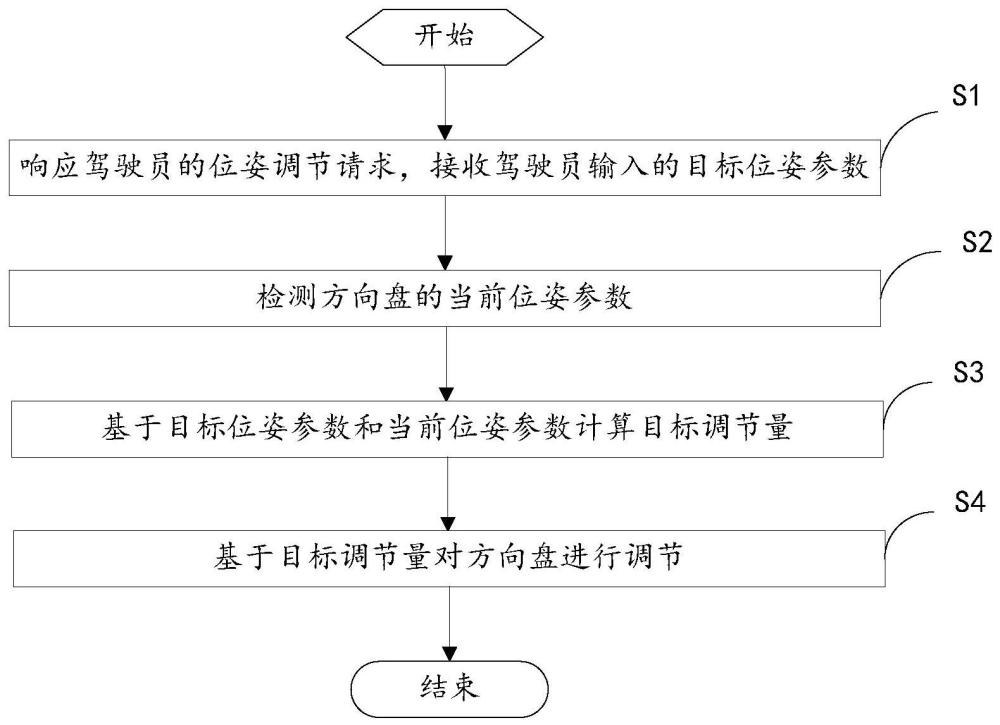
4、响应驾驶员的位姿调节请求,接收驾驶员输入的目标位姿参数,所述目标位姿参数包括目标方向盘高度参数和/或目标方向盘角度参数;
5、检测所述方向盘的当前位姿参数;
6、基于所述目标位姿参数和所述当前位姿参数计算所述方向盘的当前位姿与目标位姿之间的目标调节量;
7、基于所述目标调节量驱动轴向驱动部件和/或所述角度驱动部件,以使所述当前位姿抵达所述目标位姿。
8、可选的,所述目标位姿参数为所述目标位姿的位置参数或者调节幅度参数。
9、可选的,所述基于所述目标调节量驱动轴向驱动部件和/或所述角度驱动部件,以使所述当前位姿抵达所述目标位姿,包括步骤:
10、在驱动所述管柱移动之始,以预设加速度驱动所述管柱朝向所述目标位姿移动;
11、在所述管柱的移动速度达到预设恒速时,驱动所述管柱以所述预设恒速朝向所述目标位姿移动;
12、在所述管柱抵达所述目标位姿之前的预设距离时,以预设减速度驱动所述管柱朝向所述目标位姿移动,直至抵达所述目标位置。
13、可选的,如果所述目标位姿超越所述管柱的硬止点,则将所述硬质点作为所述目标位姿。
14、可选的,还包括步骤:
15、每隔预设时长或操作周期,控制所述管柱的轴向驱动部件和/或所述角度驱动部件朝其极限位置运动,每次停止时将停止位置标定为所述管柱的硬止点,所述硬止点包括高低硬止点和角度硬止点。
16、一种方向盘的位姿调节装置,应用于电子设备,所述方向盘设置有轴向驱动部件和角度驱动部件,所述轴向驱动部件用于驱动所述反向盘的管柱的伸缩,所述角度驱动部件用于驱动所述管柱的角度变换,所述位姿调节装置包括:
17、参数接收模块,被配置为响应驾驶员的位姿调节请求,接收驾驶员输入的目标位姿参数,所述目标位姿参数包括目标方向盘高度参数和/或目标方向盘角度参数;
18、位姿检测模块,被配置为检测所述方向盘的当前位姿参数;
19、调节量计算模块,被配置为基于所述目标位姿参数和所述当前位姿参数计算所述方向盘的当前位姿与目标位姿之间的目标调节量;
20、调节执行模块,被配置为基于所述目标调节量驱动轴向驱动部件和/或所述角度驱动部件,以使所述当前位姿抵达所述目标位姿。
21、可选的,所述调节执行模块包括:
22、软启动控制单元,被配置为在驱动所述管柱移动之始,以预设加速度驱动所述管柱朝向所述目标位姿移动;
23、恒速控制单元,被配置为在所述管柱的移动速度达到预设恒速时,驱动所述管柱以所述预设恒速朝向所述目标位姿移动;
24、软停止控制单元,被配置为在所述管柱抵达所述目标位姿之前的预设距离时,以预设减速度驱动所述管柱朝向所述目标位姿移动,直至抵达所述目标位置,如果所述目标位姿超越所述管柱的硬止点,则将所述硬质点作为所述目标位姿。
25、可选的,还包括:
26、位姿校准模块,被配置为每隔预设时长或操作周期,控制所述管柱的轴向驱动部件和/或所述角度驱动部件朝其极限位置运动,每次停止时将停止位置标定为所述管柱的硬止点,所述硬止点包括高低硬止点和角度硬止点。
27、一种电子设备,应用于车辆,所述电子设备包括至少一个处理器和与所述处理器连接的存储器,其中:
28、所述存储器用于存储计算机程序或指令;
29、所述处理器用于执行所述计算机程序或指令,以使所述电子设备实现如上所述的方向盘的位姿调节方法。
30、一种存储介质,应用于电子设备,所述存储介质承载有一个或多个程序,所述程序能够被所述电子设备执行,从而使所述电子设备实现如上所述的方向盘的调节方法。
31、从上述的技术方案可以看出,本申请公开了一种方向盘的位姿调节方法、装置、电子设备和存储介质,该方法和装置应用于电子设备,具体为响应驾驶员的位姿调节请求,接收驾驶员输入的目标位姿参数,目标位姿参数包括目标方向盘高度参数和/或目标方向盘角度参数;检测方向盘的当前位姿参数;基于目标位姿参数和当前位姿参数计算方向盘的当前位姿与目标位姿之间的目标调节量;基于目标调节量驱动轴向驱动部件和/或角度驱动部件,以使当前位姿抵达目标位姿。通过本方案驾驶员仅需要输入目标位姿参数即可实现方向盘的调节,而无需手动方式调节,从而能够满足驾驶员自动调节的要求,提高了驾驶体验。
技术特征:
1.一种方向盘的位姿调节方法,应用于电子设备,所述方向盘设置有轴向驱动部件和角度驱动部件,所述轴向驱动部件用于驱动所述反向盘的管柱的伸缩,所述角度驱动部件用于驱动所述管柱的角度变换,其特征在于,所述位姿调节方法包括步骤:
2.如权利要求1所述的位姿调节方法,其特征在于,所述目标位姿参数为所述目标位姿的位置参数或者调节幅度参数。
3.如权利要求1所述的位姿调节方法,其特征在于,所述基于所述目标调节量驱动轴向驱动部件和/或所述角度驱动部件,以使所述当前位姿抵达所述目标位姿,包括步骤:
4.如权利要求3所述的位姿调节方法,其特征在于,如果所述目标位姿超越所述管柱的硬止点,则将所述硬质点作为所述目标位姿。
5.如权利要求1~4任一项所述的位姿调节方法,其特征在于,还包括步骤:
6.一种方向盘的位姿调节装置,应用于电子设备,所述方向盘设置有轴向驱动部件和角度驱动部件,所述轴向驱动部件用于驱动所述反向盘的管柱的伸缩,所述角度驱动部件用于驱动所述管柱的角度变换,其特征在于,所述位姿调节装置包括:
7.如权利要求6所述的位姿调节装置,其特征在于,所述调节执行模块包括:
8.如权利要求6或7所述的位姿调节装置,其特征在于,还包括:
9.一种电子设备,应用于车辆,其特征在于,所述电子设备包括至少一个处理器和与所述处理器连接的存储器,其中:
10.一种存储介质,应用于电子设备,其特征在于,所述存储介质承载有一个或多个程序,所述程序能够被所述电子设备执行,从而使所述电子设备实现如权利要求1~5任一项所述的方向盘的调节方法。
技术总结
本申请公开了一种方向盘的位姿调节方法、装置、电子设备和存储介质,该方法和装置应用于电子设备,具体为响应驾驶员的位姿调节请求,接收驾驶员输入的目标位姿参数,目标位姿参数包括目标方向盘高度参数和/或目标方向盘角度参数;检测方向盘的当前位姿参数;基于目标位姿参数和当前位姿参数计算方向盘的当前位姿与目标位姿之间的目标调节量;基于目标调节量驱动轴向驱动部件和/或角度驱动部件,以使当前位姿抵达目标位姿。通过本方案驾驶员仅需要输入目标位姿参数即可实现方向盘的调节,而无需手动方式调节,从而能够满足驾驶员自动调节的要求,提高了驾驶体验。
技术研发人员:苏建宽,周凌侃,吴勇,汪哲
受保护的技术使用者:上海汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!