转角信号校验方法、系统及车辆与流程
本发明涉及车辆,尤其涉及一种转角信号校验方法、系统及车辆。
背景技术:
1、随着汽车自动化驾驶的要求,对转向角度(即转角)的测量可靠性要求越来越高。如果通过结构设计在原来的方向盘系统上增加两路冗余转角传感器,就会大幅度增加方向盘系统成本,甚至增加方向盘系统结构体积,那么在原有的方向盘系统结构下,如何识别出方向盘转角测量是否正确,或者识别出方向盘转角测量的误差是否偏大,并为车辆驾驶员进行转角失效风险预警,对于当前电动助力转向有非常积极的意义。
2、对于当前的乘用汽车其转角范围一般为3圈到4圈,而传统的方向盘转角测量方法只能测量360°范围,超过360°范围难以确定方向盘的唯一位置。而超过360°范围采取的转角检测方法是:被测量方向盘的转向信号通过减速机构传递给主转角信号,同时传递给副转角信号,参考图1所示的方向盘系统,由于方向盘传递到主转角信号的传动比和传递到副转角信号的传动比不同,因此导致当方向盘转动一定角度时,主转角齿轮和副转角齿轮转动的角度不一样,利用主转角齿轮和副转角齿轮的转角信号差值,可以得出方向盘转角超过360°范围的唯一位置,此时,方向盘测量出的转角量程,即为主转角信号测得的方向盘角度和副转角信号测得的方向盘角度的最小公倍数,参考图2所示的方向盘转角测量结果示意图。
3、然而,对于超过360°范围采用的转角检测方法,由于转角信号都是采用占空比进行表示,因此如果是占空比最大值与最小值,或者转角信号频率超范围校验,或者转角信号短路与开路这三种常见失效模式,是比较容易识别出来的,但是如果是齿轮跳齿(转角信号突变),或者齿轮空转(方向盘在转动,而主转角齿轮或者副转角齿轮不转动,信号变化幅度不一致),或者转角信号卡滞(转角信号始终停留在某一个信号不发生变化)这三种失效模式,现有的转角检测方法是无法识别出的,大大降低了失效模式识别的可靠性,进而难以保证转角失效风险预警的准确性,容易造成自动驾驶过程中发生安全事故。
技术实现思路
1、本发明的主要目的在于提供一种转角信号校验方法、系统及车辆,旨在解决现有的转角检测方法存在失效模式识别可靠性较低,难以保证转角失效风险预警准确性的问题。
2、为实现上述目的,第一方面,本发明提供一种转角信号校验方法,包括:
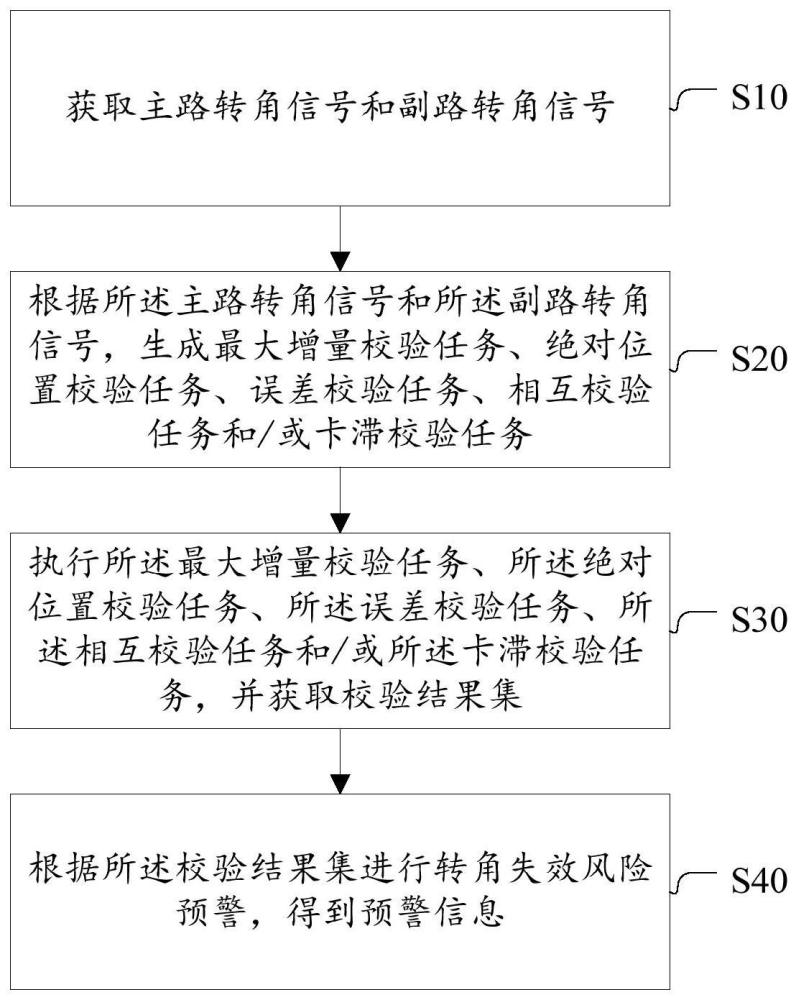
3、获取主路转角信号和副路转角信号;
4、根据所述主路转角信号和所述副路转角信号,生成最大增量校验任务、绝对位置校验任务、误差校验任务、相互校验任务和/或卡滞校验任务;
5、执行所述最大增量校验任务、所述绝对位置校验任务、所述误差校验任务、所述相互校验任务和/或所述卡滞校验任务,并获取校验结果集;
6、根据所述校验结果集进行转角失效风险预警,得到预警信息。
7、第二方面,本发明还提供一种转角信号校验系统,包括:
8、信号获取模块,用于获取主路转角信号和副路转角信号;
9、任务生成模块,用于根据所述主路转角信号和所述副路转角信号,生成最大增量校验任务、绝对位置校验任务、误差校验任务、相互校验任务和/或卡滞校验任务;
10、任务执行模块,用于执行所述最大增量校验任务、所述绝对位置校验任务、所述误差校验任务、所述相互校验任务和/或所述卡滞校验任务,并获取校验结果集;
11、风险预警模块,用于根据所述校验结果集进行转角失效风险预警,得到预警信息。
12、第三方面,本发明还提供一种车辆,包括车身、车轮、方向盘系统;所述方向盘系统包含方向盘转角齿轮、与所述方向盘转角齿轮啮合连接的主转角齿轮和副转角齿轮;所述车辆还包括上述第二方面所述的转角信号校验系统。
13、上述转角信号校验方法、系统及车辆,根据测量的主路转角信号和副路转角信号生成最大增量校验任务、绝对位置校验任务、误差校验任务、相互校验任务和/或卡滞校验任务,并通过执行转角校验任务,来获得校验结果集,并根据校验结果集进行转角失效风险预警,提高了转角失效模式的识别可靠性,并且有效保证了转角失效风险预警的准确性。
技术特征:
1.一种转角信号校验方法,其特征在于,所述转角信号校验方法包括:
2.如权利要求1所述的转角信号校验方法,其特征在于,所述执行所述最大增量校验任务、所述绝对位置校验任务、所述误差校验任务、所述相互校验任务和/或所述卡滞校验任务,并获取校验结果集,包括:
3.如权利要求2所述的转角信号校验方法,其特征在于,所述任务池包含所述最大增量校验任务、所述绝对位置校验任务、所述误差校验任务、所述相互校验任务和所述卡滞校验任务;所述线程池的数量与所述任务池中的转角校验任务数量相同;
4.如权利要求3所述的转角信号校验方法,其特征在于,所述获取连续两个采样时间之间的主路转角变化和副路转角变化,并通过判断所述主路转角变化和所述副路转角变化是否小于对应的最大转向速度,来生成所述最大增量校验任务的校验结果,包括:
5.如权利要求4所述的转角信号校验方法,其特征在于,所述获取第一精度方向盘转角和第二精度方向盘转角,并通过检测第一精度方向盘转角与第二精度方向盘转角之间的转角误差是否小于预设误差,来生成所述绝对位置校验任务的校验结果,包括:
6.如权利要求5所述的转角信号校验方法,其特征在于,所述获取增量补偿方向盘转角和实时方向盘转角进行绝对位置误差评估,并通过检测绝对位置误差是否小于预设阈值,来生成所述误差校验任务的校验结果,包括:
7.如权利要求6所述的转角信号校验方法,其特征在于,所述获取主路转角增量和副路转角增量,并通过比较所述主路转角增量和所述副路转角增量,来生成所述相互校验任务的校验结果,包括:
8.如权利要求7所述的转角信号校验方法,其特征在于,所述获取预设函数关系,并通过检测主路转角和副路转角是否符合所述预设函数关系,来生成所述卡滞校验任务的校验结果,包括:
9.一种转角信号校验系统,其特征在于,包括:
10.一种车辆,包括车身、车轮和方向盘系统,所述方向盘系统包含方向盘转角齿轮、与所述方向盘转角齿轮啮合连接的主转角齿轮和副转角齿轮,其特征在于,所述车辆还包括如权利要求9所述的转角信号校验系统。
技术总结
本发明公开了一种转角信号校验方法,包括:获取主路转角信号和副路转角信号;根据主路转角信号和副路转角信号,生成最大增量校验任务、绝对位置校验任务、误差校验任务、相互校验任务和/或卡滞校验任务;执行最大增量校验任务、绝对位置校验任务、误差校验任务、相互校验任务和/或卡滞校验任务,并获取校验结果集;根据校验结果集进行转角失效风险预警,得到预警信息。本发明还公开了一种转角信号校验系统及车辆。本发明提高了转角失效模式的识别可靠性,并且有效保证了转角失效风险预警的准确性。
技术研发人员:高明,向辉,周廷明,刘续荣
受保护的技术使用者:湖南东嘉智能科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!