一种复杂地面的节能附着仿生机械足
本发明涉及仿生机械足,特别是涉及一种复杂地面的节能附着仿生机械足。
背景技术:
1、机器人研究一直是机械领域的热门方向,当前机器人的移动方式主要为轮式、履带式和足式;轮式机器人效率高、操作方便,但复杂地面的通过性较差,履带式机器人虽然可以在山地、岩石行驶,运行稳定,履带板厚重,能耗大,速度慢,相对于前两种机器人,足式机器人由于步态灵活,越障性强,可适应多种不同地面,尤其在岩石等复杂地面有良好的通过性能,因而备受关注,传统的足式机器人大部分只注重在硬地面的行走,足部结构简单,适应性差,在复杂地面行走时足部容易打滑,导致足式机器人不能在复杂地面正常行走,随着研究的深入,足式机器人必将要适应更多类型的地面,岩石地面就是其中的一种,所以传统的足式机器人已经不能满足在复杂地面上行走的需求,所以现有足式机器人在复杂地面的行走稳定性和平衡性较差。
2、动物在自然选择法则下,其足部结构、运动、功能等已经进化得与环境相适应,基于仿生手段对动物足部特殊结构进行工程应用早已成为人们解决问题和寻找灵感的源泉,羚羊作为一种极地迁徙动物,其蹄部表现出多种优良特性,羚羊属于中型鹿,成年雄性羚羊的体重可达80kg,其足趾面约为是0.32m2,如此小的足趾需要承受巨大的重量,表明羚羊在高速奔跑过程中足趾具有优异的缓冲减振性能,因此羚羊在复杂地面具有节能稳定的行走和奔跑优势,所以本申请基于羚羊足端设计了一种复杂地面的节能附着仿生机械足。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明的目的在于提供一种复杂地面的节能附着仿生机械足,用于解决现有技术中足式机器人在复杂地面的行走稳定性和平衡性较差的问题。
2、为实现上述目的及其他相关目的,本发明提供如下技术方案:
3、一种复杂地面的节能附着仿生机械足,包括踝关节组件、跖趾关节组件、足端组件和仿悬蹄组件,所述踝关节组件分别与所述跖趾关节组件和仿悬蹄组件连接,所述跖趾关节组件还与所述足端组件连接,其中,所述踝关节组件包括两个第一弹簧和使得两个第一弹簧弹性收缩的踝关节子组件,所述足端组件包括两个第二弹簧和使得两个第二弹簧弹性收缩的足端子组件,所述足端子组件包括承重趾,所述承重趾的趾掌处设有凸冠,所述凸冠上设有四段箭状凸起棱纹,所述仿悬蹄组件包括第三弹簧和使得第三弹簧弹性收缩的仿悬蹄子组件,该技术方案中的凸冠采用柔性材料起到缓冲作用,凸起棱纹可以在仿生机械足与地面接触时提供更大的摩擦力,从而增加仿生机械足的牢固性和抓地力,使机器人能够更好地完成任务。
4、于本发明的一实施例中,所述踝关节子组件包括上关节子组件和下关节子组件,所述关节子组件与所述下关节子组件活动连接,且所述下关节子组件与所述足端组件连接。
5、于本发明的一实施例中,所述上关节子组件包括第一安装板、安装在所述第一安装板上的第一固定板和安装在所述第一固定板上的第一固定支座和第二固定支座,所述第一固定支座和第二固定支座的相对侧安装有第一滑柱,两个所述第一弹簧套设在所述第一滑柱上,所述第一滑柱的表面还滑动连接有位于两个第一弹簧之间并与两个第一弹簧相接触的移动块。
6、于本发明的一实施例中,所述下关节子组件包括与所述第一固定板铰接的第二固定板、安装在第二固定板上的第三固定支座和与所述第三固定支座铰接的第一连接板,所述第一连接板远离所述第三固定支座的那一端与所述移动块铰接。
7、于本发明的一实施例中,所述跖趾关节组件包括连接筒、穿设在连接筒内的固定柱、第二连接板和第三连接板,所述连接筒安装在所述第二固定板远离所述第一固定板的那一端上,所述连接筒内通过扭簧与固定柱铰接,所述第二连接板的数量为两个,两个所述第二连接板的一侧分别安装在固定柱的两端上,两个所述第二连接板的另一侧均安装在第三连接板上。
8、于本发明的一实施例中,所述承重趾的趾尖处内外侧均开设有若干个凹槽,所述承重趾的趾中端处内外侧均设有九道锯齿状棱纹,该技术方案中的锯齿状棱纹之间有间隙,可以增加仿生机械足在不同地形上的适应性,当仿生机械足与地面接触时,每个锯齿都可以独立地适应地形的变化,从而保持仿生机械足的稳定性和平衡性。
9、于本发明的一实施例中,所述足端子组件还包括安装在第三连接板上的第一固定块、第二固定块和支撑件,所述第一固定块、第二固定块的相对侧设有第二滑柱,两个所述第二弹簧套设在第二滑柱上,所述支撑件包括与第二滑柱滑动连接的第一滑块和与第一滑块一体成型的支撑板,所述第一滑块位于两个第一弹簧之间并与两个第二弹簧相接触,所述支撑板通过足端连接块安装在承重趾上。
10、于本发明的一实施例中,所述第三连接板朝向所述支撑板的一侧设有滑轨,所述滑轨上滑动连接有安装在所述支撑板上的第二滑块。
11、于本发明的一实施例中,所述仿悬蹄子组件包括固定套和与所述固定套滑动连接的移动件,所述移动件包括支撑杆和与所述支撑杆一体成型并与所述固定套滑动连接的第三滑柱,所述第二弹簧设置在固定套内并与所述第三滑柱相接触,所述固定套通过第二安装板安装在第二固定板上,所述支撑柱的底端安装有支撑块。
12、如上所述,本发明的一种复杂地面的节能附着仿生机械足,具有以下有益效果:
13、本发明从羚羊蹄高速奔跑时关节处的能量变化考虑,在仿生机械足的踝关节和跖趾关节等位置采用了弹性元件,起到了节能的作用,从悬蹄增大了蹄部与地面的接触面积的角度考虑,设计了仿悬蹄组件,并且仿悬蹄组件也采用了弹性元件,起到了缓冲的作用,又基于羚羊蹄部触地单元与复杂地面的作用机理,选取了仿生附着足端,仿生附着足端中从承重趾宏微观结构考虑,设计了仿生凸冠、棱纹、凹槽等触地部件,起到了提高仿生机械足附着性能的作用,有利于提高机器人在复杂等地面的通过性,所以该仿生机械足在复杂地面的行走稳定性和平衡性较好。
技术特征:
1.一种复杂地面的节能附着仿生机械足,其特征在于:包括踝关节组件(1)、跖趾关节组件(2)、足端组件(3)和仿悬蹄组件(4),所述踝关节组件(1)分别与所述跖趾关节组件(2)和仿悬蹄组件(4)连接,所述跖趾关节组件(2)还与所述足端组件(3)连接;
2.根据权利要求1所述的一种复杂地面的节能附着仿生机械足,其特征在于:所述踝关节子组件包括上关节子组件和下关节子组件,所述关节子组件与所述下关节子组件活动连接,且所述下关节子组件与所述足端组件(3)连接。
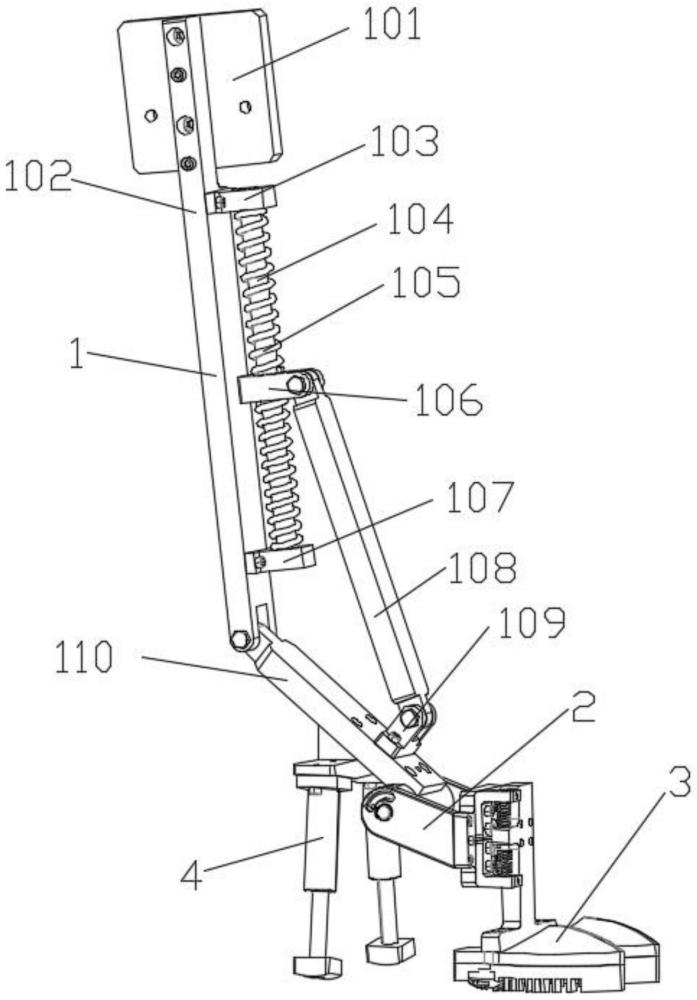
3.根据权利要求2所述的一种复杂地面的节能附着仿生机械足,其特征在于:所述上关节子组件包括可安装在电机上第一安装板(101)、安装在所述第一安装板(101)上的第一固定板(102)和安装在所述第一固定板(102)上的第一固定支座(103)和第二固定支座(107),所述第一固定支座(103)和第二固定支座(107)的相对侧安装有第一滑柱(104),两个所述第一弹簧(105)套设在所述第一滑柱(104)上,所述第一滑柱(104)的表面还滑动连接有位于两个第一弹簧(105)之间并与两个第一弹簧(105)相接触的移动块(106)。
4.根据权利要求3所述的一种复杂地面的节能附着仿生机械足,其特征在于:所述下关节子组件包括与所述第一固定板(102)铰接的第二固定板(110)、安装在第二固定板(110)上的第三固定支座(109)和与所述第三固定支座(109)铰接的第一连接板(108),所述第一连接板(108)远离所述第三固定支座(109)的那一端与所述移动块(106)铰接。
5.根据权利要求4所述的一种复杂地面的节能附着仿生机械足,其特征在于:所述跖趾关节组件(2)包括连接筒(201)、穿设在连接筒(201)内的固定柱(202)、第二连接板(203)和第三连接板(204),所述连接筒(201)安装在所述第二固定板(110)远离所述第一固定板(102)的那一端上,所述连接筒(201)内通过扭簧与固定柱(202)铰接,所述第二连接板(203)的数量为两个,两个所述第二连接板(203)的一侧分别安装在固定柱(202)的两端上,两个所述第二连接板(203)的另一侧均安装在第三连接板(204)上。
6.根据权利要求1所述的一种复杂地面的节能附着仿生机械足,其特征在于:所述承重趾(309)的趾尖处内外侧均开设有若干个凹槽(310),所述承重趾(309)的趾中端处内外侧均设有九道锯齿状棱纹(311)。
7.根据权利要求5所述的一种复杂地面的节能附着仿生机械足,其特征在于:所述足端子组件还包括安装在第三连接板(204)上的第一固定块(301)、第二固定块(302)和支撑件,所述第一固定块(301)、第二固定块(302)的相对侧设有第二滑柱(303),两个所述第二弹簧(304)套设在第二滑柱(303)上,所述支撑件包括与第二滑柱(303)滑动连接的第一滑块(305)和与第一滑块(305)一体成型的支撑板(307),所述第一滑块(305)位于两个第一弹簧(105)之间并与两个第二弹簧(304)相接触,所述支撑板(307)通过足端连接块(308)安装在承重趾(309)上。
8.根据权利要求7所述的一种复杂地面的节能附着仿生机械足,其特征在于:所述第三连接板(204)朝向所述支撑板(307)的一侧设有滑轨(306),所述滑轨(306)上滑动连接有安装在所述支撑板(307)上的第二滑块。
9.根据权利要求4所述的一种复杂地面的节能附着仿生机械足,其特征在于:所述仿悬蹄子组件包括固定套(402)和与所述固定套(402)滑动连接的移动件,所述移动件包括支撑杆(403)和与所述支撑杆(403)一体成型并与所述固定套(402)滑动连接的第三滑柱(406),所述第二弹簧(304)设置在固定套(402)内并与所述第三滑柱(406)相接触,所述固定套(402)通过第二安装板(401)安装在第二固定板(110)上,所述支撑柱的底端安装有支撑块(404)。
技术总结
本发明提供一种复杂地面的节能附着仿生机械足,包括踝关节组件、跖趾关节组件、足端组件和仿悬蹄组件,所述踝关节组件包括两个第一弹簧和使得两个第一弹簧弹性收缩的踝关节子组件,所述足端组件包括两个第二弹簧和使得两个第二弹簧弹性收缩的足端子组件,所述足端子组件包括承重趾,所述仿悬蹄组件包括第三弹簧和使得第三弹簧弹性收缩的仿悬蹄子组件;本发明具有以下有益效果:本发明从羚羊蹄高速奔跑时关节处的能量变化考虑,在仿生机械足的踝关节和跖趾关节等位置采用了弹性元件,起到了节能的作用,从悬蹄增大了蹄部与地面的接触面积的角度考虑,设计了仿悬蹄组件,并且仿悬蹄组件也采用了弹性元件,起到了缓冲的作用。
技术研发人员:李国玉,罗烨轩,吴旭,苏皖翼,张锐
受保护的技术使用者:上海电机学院
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!