一种基于主销转向车轮转角的转角闭环控制方法及系统与流程
本发明属于汽车,具体涉及一种基于主销转向车轮转角的转角闭环控制方法及系统。
背景技术:
1、随着全球汽车保有量不断提升,城市中过多的机动车导致交通拥堵的现状频发。传统转向技术车辆转弯半径大,停车入位所需空间大,无法进行原地掉头。为使车辆具有更加灵活的转向操作,主销转向技术逐渐发展起来。通过在车辆主销处施加转向扭矩,进行四轮独立转向,实现快速变道、原地掉头等功能。现有技术中,仅提出了主销转向的概念,但对主销转向的转角闭环控制没有详细开展设计和应用。
技术实现思路
1、本发明的目的就在于提供一种基于主销转向车轮转角的转角闭环控制方法及系统,以解决主销车辆车轮转角跟随控制,实现角度闭环及车轮转向的问题。
2、本发明的目的是通过以下技术方案实现的:
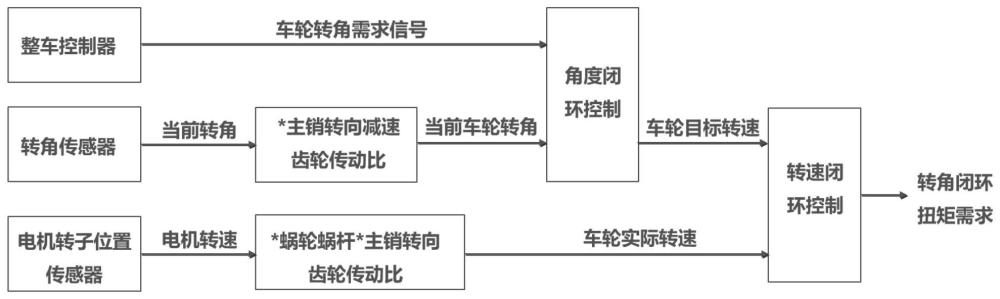
3、一种基于主销转向车轮转角的转角闭环控制方法,包括以下步骤:根据整车控制器vcu和当前车轮转角通过角度闭环控制计算出车轮目标转速,根据车轮目标转速和车轮实际转速,通过转速闭环控制计算出车轮旋转实际需求的扭矩。
4、进一步地,具体包括以下步骤:
5、a、从整车控制器vcu处获得车轮转角需求信号;。
6、b、通过主销转向减速机构传动比换算关系从转角传感器tas处获得当前车轮转角信号;
7、c、对车轮转角需求和当前车轮转角进行比例微分计算,得到车轮的目标转速和转角跟随误差;
8、d、从步骤c处获得车轮目标转速,根据对车轮目标转速进行幅值和斜率限制,得到车轮实际目标转速;
9、e、从电机转子位置传感器处获得电机实际转速,通过主销转向减速机构传动比获得车轮实际转速;
10、f、对车轮实际转速、车轮实际目标转速进行比例积分算法,得到转角闭环扭矩需求。
11、更进一步地,步骤b,计算车轮转角时,通过转角传感器tas解析后角度乘以传感器到主销的传动比,换算出实际车轮转向转角,即当前车轮转角。
12、更进一步地,由转角传感器tas获得车轮当前转角,将角度乘以主销转向减速齿轮传动比计算出当前车轮转角。
13、更进一步地,步骤c,通过对车轮实际角度和车轮转角需求,通过比例微分算法,直接计算出车轮需求转角速度,即车轮目标转速。
14、更进一步地,步骤e,计算车轮转速时,通过电机转子位置传感器rps解析后的转角速度,乘以电机到主销轴线的传动比,换算出车轮实际转角速度,即车轮实际转速。
15、更进一步地,由电机转子位置传感器rps处获得电机实际转速,将电机转速乘以蜗轮蜗杆再乘以主销转向齿轮传动比,换算出车轮实际转速。
16、更进一步地,步骤f,通过车轮目标转角速度和车轮的实际转角速度,通过比例积分算法,直接计算出车轮需求的转向扭矩。
17、一种基于主销转向车轮转角的转角闭环控制系统,包括整车控制器vcu、位于中间齿轮上的转角传感器tas、电机、电机转子位置传感器rps、主销转向控制器和减速机构;所述整车控制器vcu用于获取车轮转角需求信号;所述转角传感器tas用于获取车轮当前转角;所述电机转子位置传感器rps用于获取电机实际转速。所述主销转向控制器、电机通过主销转向减速机构,输出转向需求扭矩直接作用在车辆主销轴线上,驱动车轮旋转。
18、与现有技术相比,本发明的有益效果是:
19、本发明提出了一种主销转向转角闭环控制的方法及系统,用于主销车辆车轮转角跟随控制;该方法可根据主销转向系统的特征,通过车辆转角需求信号与车辆当前车轮转角状态信号计算出当前车轮实际速度和目标需求速度,并根据目标角度和当前角度之差计算出电机目标转矩施加到转向助力电机,实现角度闭环,从而实现车轮转向。
技术特征:
1.一种基于主销转向车轮转角的转角闭环控制方法,其特征在于,包括以下步骤:根据整车控制器vcu和当前车轮转角通过角度闭环控制计算出车轮目标转速,根据车轮目标转速和车轮实际转速,通过转速闭环控制计算出车轮旋转实际需求的扭矩。
2.根据权利要求1所述的一种基于主销转向车轮转角的转角闭环控制方法,其特征在于,具体包括以下步骤:
3.根据权利要求2所述的一种基于主销转向车轮转角的转角闭环控制方法,其特征在于:步骤b,计算车轮转角时,通过转角传感器tas解析后角度乘以传感器到主销的传动比,换算出实际车轮转向转角,即当前车轮转角。
4.根据权利要求3所述的一种基于主销转向车轮转角的转角闭环控制方法,其特征在于:由转角传感器tas获得车轮当前转角,将角度乘以主销转向减速齿轮传动比计算出当前车轮转角。
5.根据权利要求2所述的一种基于主销转向车轮转角的转角闭环控制方法,其特征在于:步骤c,通过对车轮实际角度和车轮转角需求,通过比例微分算法,直接计算出车轮需求转角速度,即车轮目标转速。
6.根据权利要求2所述的一种基于主销转向车轮转角的转角闭环控制方法,其特征在于:步骤e,计算车轮转速时,通过电机转子位置传感器rps解析后的转角速度,乘以电机到主销轴线的传动比,换算出车轮实际转角速度,即车轮实际转速。
7.根据权利要求6所述的一种基于主销转向车轮转角的转角闭环控制方法,其特征在于:由电机转子位置传感器rps处获得电机实际转速,将电机转速乘以蜗轮蜗杆再乘以主销转向齿轮传动比,换算出车轮实际转速。
8.根据权利要求2所述的一种基于主销转向车轮转角的转角闭环控制方法,其特征在于:步骤f,通过车轮目标转角速度和车轮的实际转角速度,通过比例积分算法,直接计算出车轮需求的转向扭矩。
9.一种基于主销转向车轮转角的转角闭环控制系统,其特征在于:包括整车控制器vcu、位于中间齿轮上的转角传感器tas、电机、电机转子位置传感器rps、主销转向控制器和减速机构;所述整车控制器vcu用于获取车轮转角需求信号;所述转角传感器tas用于获取车轮当前转角;所述电机转子位置传感器rps用于获取电机实际转速。所述主销转向控制器、电机通过主销转向减速机构,输出转向需求扭矩直接作用在车辆主销轴线上,驱动车轮旋转。
技术总结
本发明涉及一种基于主销转向车轮转角的转角闭环控制方法及系统,控制方法包括以下步骤:根据整车控制器VCU和当前车轮转角通过角度闭环控制计算出车轮目标转速,根据车轮目标转速和车轮实际转速,通过转速闭环控制计算出车轮旋转实际需求的扭矩。本发明提出了一种主销转向转角闭环控制的方法及系统,用于主销车辆车轮转角跟随控制;该方法可根据主销转向系统的特征,通过车辆转角需求信号与车辆当前车轮转角状态信号计算出当前车轮实际速度和目标需求速度,并根据目标角度和当前角度之差计算出电机目标转矩施加到转向助力电机,实现角度闭环,从而实现车轮转向。
技术研发人员:高尚,何畅,王鹏飞,胡安辉
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!