搬运机器人的底盘结构的制作方法
本技术属于搬运机器人的,具体涉及一种搬运机器人的底盘结构。
背景技术:
1、现有的搬运机器人的底盘结构安装复杂,通过前底盘和后底盘进行连接成一个底盘整体,然后分别将驱动器,控制器以及相机组件等元器件通过安装钣金固定至底盘整体上,导致整个底盘的拆装结构复杂,安装效率低。
技术实现思路
1、本实用新型提供了一种搬运机器人的底盘结构解决上述提到的技术问题,具体采用如下的技术方案:
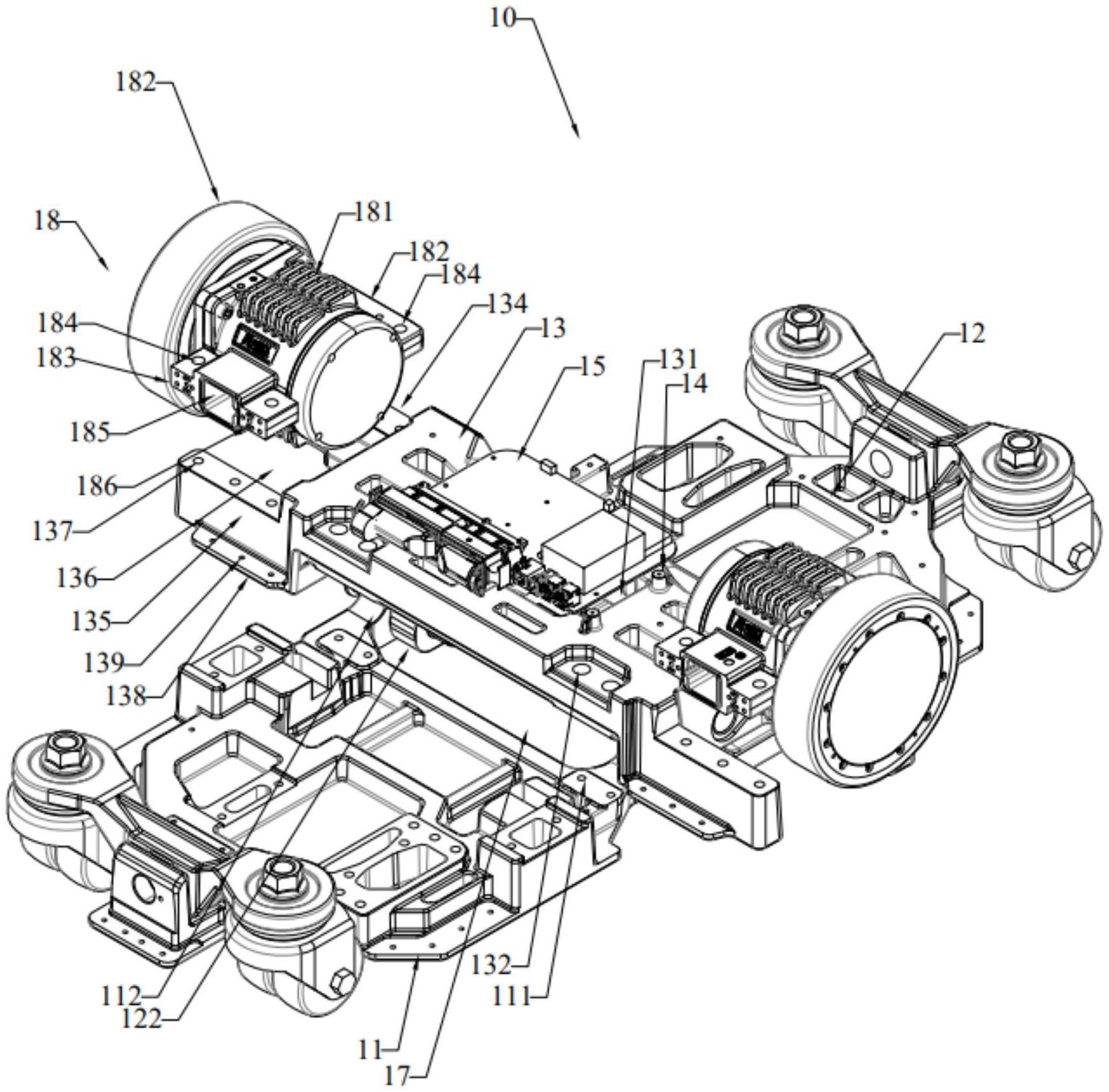
2、一种搬运机器人的底盘结构,包括:前底盘、后底盘和加固中桥;前底盘连接至后底盘;加固中桥同时可拆卸安装于前底盘和后底盘;加固中桥的中部形成有安装孔位;安装孔位上方安装有用于控制搬运机器人进行运行的控制器;控制器的下方安装有用于拍照的相机组件;相机组件伸入至安装孔位内;前底盘和后底盘之间形成有用于供相机组件的相机拍摄地面的拍摄空位;加固中桥的两端分别设有阶梯部;阶梯部固定有驱动组件;驱动组件包括:驱动电机;驱动电机的输出端连接有驱动轮;驱动电机的壳体形成有安装耳;驱动电机通过安装耳固定至阶梯部;安装耳还设有安装插槽和电性接口;安装插槽内安装有用于控制驱动电机的驱动器;驱动器电性连接至电性接口。
3、进一步地,前底盘的两侧形成有第一前安装孔;后底盘的两侧形成有第一后安装孔;加固中桥的两侧分别形成有用于配合第一前安装孔的第一前通孔和用于配合第一后安装孔的第一后通孔;加固中桥通过螺钉穿过第一前通孔并旋入第一前安装孔以及通过螺钉穿过第一后通孔并旋入第一后安装孔以同时固定至前底盘和后底盘。
4、进一步地,驱动电机的两侧分别设有安装耳;安装耳形成有第二通孔;阶梯部形成有两个用于与两个安装耳进行抵触支撑的支撑连接部;两个支撑连接部之间形成有用于容纳驱动电机的容纳孔位;支撑连接部形成有用于配合第二通孔的第二安装孔;驱动组件通过螺钉穿过第二通孔并旋入第二安装孔固定至阶梯部。
5、进一步地,支撑连接部的外侧还形成有用于固定搬运机器人的壳体的壳体连接部;壳体连接部形成有用于固定壳体的固定孔。
6、进一步地,前底盘的两侧分别形成有前连接端;后底盘的两侧分别形成有后连接端;两个前连接端分别同与其对应的后连接端通过螺钉进行固定连接。
7、进一步地,安装孔位的上方设有多个用于支撑控制器的支撑柱;控制器通过螺钉固定于支撑柱以固定安装于安装孔位的上方。
8、本实用新型的有益之处在于所提供的搬运机器人的底盘结构将驱动组件、控制器以及相机组件这样的电性元器件集中安装在加固中桥上进行整体安装,使得这些元器件的结构集成,电性连接结构也集成,安装结构简单,连接线路简洁,拆装快速,提高整体生产效率。并且,通过加固中桥对前底盘和后底盘的连接结构进行加固,整体底盘的安装结构更加稳固。将加固中桥采用可拆卸方式进行安装,这样可以通过更换不同尺寸的加固中桥的来改变底盘的宽度,通用性更高,实用性强。
技术特征:
1.一种搬运机器人的底盘结构,其特征在于,包括:前底盘、后底盘和加固中桥;所述前底盘连接至所述后底盘;所述加固中桥同时可拆卸安装于所述前底盘和所述后底盘;所述加固中桥的中部形成有安装孔位;所述安装孔位上方安装有用于控制搬运机器人进行运行的控制器;所述控制器的下方安装有用于拍照的相机组件;所述相机组件伸入至所述安装孔位内;所述前底盘和所述后底盘之间形成有用于供所述相机组件的相机拍摄地面的拍摄空位;所述加固中桥的两端分别设有阶梯部;所述阶梯部固定有驱动组件;所述驱动组件包括:驱动电机;所述驱动电机的输出端连接有驱动轮;所述驱动电机的壳体形成有安装耳;所述驱动电机通过所述安装耳固定至所述阶梯部;所述安装耳还设有安装插槽和电性接口;所述安装插槽内安装有用于控制所述驱动电机的驱动器;所述驱动器电性连接至所述电性接口。
2.根据权利要求1所述的搬运机器人的底盘结构,其特征在于,
3.根据权利要求1所述的搬运机器人的底盘结构,其特征在于,
4.根据权利要求3所述的搬运机器人的底盘结构,其特征在于,
5.根据权利要求1所述的搬运机器人的底盘结构,其特征在于,
6.根据权利要求1所述的搬运机器人的底盘结构,其特征在于,
技术总结
本技术公开了一种搬运机器人的底盘结构,包括:前底盘、后底盘和加固中桥;前底盘连接至后底盘;加固中桥同时固定于前底盘和后底盘;加固中桥的中部形成有安装孔位;安装孔位上方安装有控制器;控制器的下方安装有相机组件;相机组件伸入至安装孔位内;前底盘和后底盘之间形成有拍摄空位;加固中桥的两端分别设有阶梯部;驱动组件固定于阶梯部;驱动组件包括:驱动电机;驱动电机的输出端连接有驱动轮;驱动电机的壳体形成有安装耳;驱动电机通过安装耳固定至阶梯部;安装耳还设有安装插槽和电性接口;安装插槽内安装有驱动器。本技术的搬运机器人的底盘结构的结构更加稳固,安装结构简单,生产效率高。
技术研发人员:杜相泉,李卫君
受保护的技术使用者:浙江迈睿机器人有限公司
技术研发日:20230117
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!