一种履带式巡检机器人的制作方法
本技术涉及巡检机器人,具体为一种履带式巡检机器人。
背景技术:
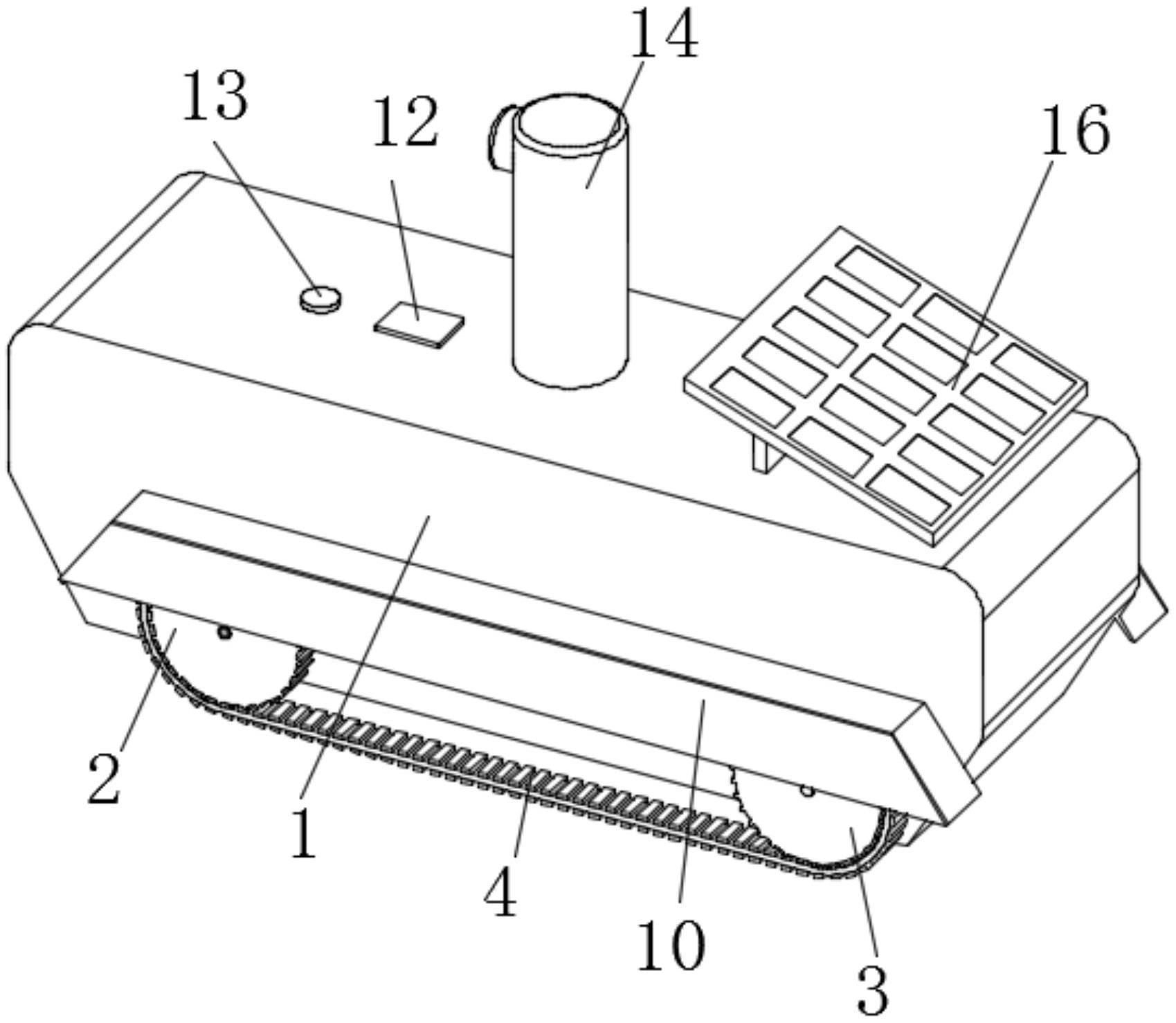
1、机器人是一种能够半自主或全自主的智能机器,可通过编程和自动控制来执行诸如作业或移动等任务,且随着人们对机器人技术智能化本质认识的加深,机器人开始源源不断地运行在人类活动的各个领域里,使得机器人具有感知、决策、执行等基本特征,可以辅助甚至代替人类完成危险、繁重以及复杂的工作,例如很多高危场所存在安全隐患,工作人员进去很大可能对自身安全造成影响,但为了加强高危场所的巡检工作,侦查巡检机器人应运而生,其移动结构采用履带结构,使得机器人可顺利通行,提高机器人的通行能力和环境适应性,现有巡检机器人的摄像头只可照射同一方向,无法对周边环境全方位的进行侦查巡检,若对周边环境巡检还需转动整体,易导致转向困难,增加了机器人整体转向的次数,降低了机器人的巡检效率,为此,我们提出一种履带式巡检机器人。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种履带式巡检机器人,结构设计新颖,转向方便,扩大了巡检视角,延长了续航时间,提高了巡检效率,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种履带式巡检机器人,包括车体、离合组件、离合驱动组件和行走驱动组;
3、车体:其左端对称转动连接有转筒,两个转筒的相背离外侧端头均设有驱动轮,所述车体的右端对称通过转轴转动连接有从动轮,所述驱动轮和横向对应的从动轮均通过履带传动连接,所述车体的上端内部设有电机三,所述电机三的输出轴顶端设有摄像机,所述车体的上表面分别设有单片机和gprs数据传输器,所述车体的上端内部设有蓄电池,所述单片机的输入端电连接蓄电池的输出端,所述单片机的输出端电连接电机三的输入端,所述摄像机的输出端电连接单片机的输入端,所述gprs数据传输器与单片机双向电连接,所述车体的左端内部设有空腔,所述空腔的底面对称设有支撑板;
4、离合组件:转动连接于两个支撑板之间,所述离合组件分别与两个转筒通过连接组件连接;
5、离合驱动组件:设置于空腔的前后内壁之间;
6、行走驱动组件:设置于空腔的内部底面,行走驱动组件与离合组件固定连接,结构设计新颖,转向方便,扩大了巡检视角,延长了续航时间,提高了巡检效率。
7、进一步的,所述离合组件包括固定轴、套筒、驱动齿盘和从动齿盘,所述套筒有两个且分别转动连接于支撑板的上端内部,所述固定轴分别与相邻的套筒内壁转动连接,所述驱动齿盘设置于固定轴的外弧面中部,所述从动齿盘分别固定连接于两个套筒的相对内侧端头,所述从动齿盘均与固定轴的外弧面转动连接,所述驱动齿盘分别与两个从动齿盘啮合连接,所述固定轴的外弧面左右两端均套接有弹簧,所述弹簧分别位于驱动齿盘和相邻的从动齿盘之间,用于控制巡检机器人转向。
8、进一步的,所述行走驱动组件包括立板、电机二、蜗杆和蜗轮环,所述立板对称设置于空腔的内部底面,两个立板之间转动连接有蜗杆,右侧的立板右侧面设有电机二,所述蜗轮环设置于驱动齿盘的外弧面中部,所述蜗杆和蜗轮环啮合连接,所述电机二的输出轴与蜗杆的右端固定连接,所述电机二的输入端电连接单片机的输出端,驱动巡检机器人移动。
9、进一步的,所述离合驱动组件包括水平板、电机一、凸轮和牵引盘,所述水平板设置于空腔的前后侧壁之间,所述水平板的上表面中部设有电机一,所述电机一的输出轴与水平板中部设置的通孔内壁滑动连接,所述电机一的输出轴下端设有凸轮,所述牵引盘分别与驱动齿盘中部设置的凹槽内壁滑动连接,所述凸轮分别与两个牵引盘配合设置,所述牵引盘均与空腔的底面滑动连接,控制驱动齿盘和从动齿盘的啮合和分离。
10、进一步的,所述驱动齿盘中部设置的凹槽外弧面均设有轴承,所述轴承的外环外弧面分别与相邻的牵引盘内弧面固定连接,减小摩擦力。
11、进一步的,所述连接组件包括内六角套筒和外六角套筒,所述内六角套筒分别设置于两个转筒的相对内侧端头,所述外六角套筒分别设置于两个套筒的相背离外侧端头,所述内六角套筒的内壁分别与相邻的外六角套筒外表面滑动连接,所述固定轴分别与内六角套筒和外六角套筒的内壁转动连接,便于驱动齿盘传递动力。
12、进一步的,还包括固定板和太阳能电池板,所述固定板设置于车体的上表面右端,所述太阳能电池板设置于固定板的上端,所述太阳能电池板的输出端通过太阳能控制器与蓄电池的输入端电连接,利用太阳能进行发电,便于及时补充电能。
13、进一步的,所述车体的前后侧面均设有护罩,所述护罩分别与相邻的履带配合设置,起到保护作用。
14、与现有技术相比,本实用新型的有益效果是:本履带式巡检机器人,具有以下好处:
15、太阳能电池板将太阳能转化为电能并通过太阳能控制器存储在蓄电池的内部,利用太阳能进行发电,便于及时补充电能,延长续航时间,通过远程控制终端向gprs数据传输器发送控制信号,gprs数据传输器将信号发送给单片机,通过单片机启动电机二,电机二的输出轴带动蜗杆转动,蜗杆通过与蜗轮环啮合连接带动驱动齿盘转动,驱动齿盘带动从动齿盘转动,从动齿盘分别带动套筒和外六角套筒转动,外六角套筒带动相邻的内六角套筒转动,内六角套筒通过转筒带动驱动轮转动,进而驱动车体前后移动,当需要进行转向时,通过单片机启动电机一,电机一的输出轴带动凸轮旋转,凸轮将其中一个牵引盘向远离驱动齿盘的一侧移动,牵引盘带动与其转动连接的从动齿盘与驱动齿盘分离,与该牵引盘固定连接的外六角套筒在相邻的内六角套筒内部滑动,同侧的驱动轮不再转动,此时两个驱动轮不同步,从而实现履带式巡检机器人的转向,履带式巡检机器人在移动的过程中摄像机对周围环境进行巡检录像,并将图像信息发送给单片机,单片机通过gprs数据传输器将图像信息发送给外部终端设备,通过单片机启动电机三,电机三的输出轴带动摄像机,实现三百六十度无死角巡检,该履带式巡检机器人,结构设计新颖,转向方便,扩大了巡检视角,延长了续航时间,提高了巡检效率。
技术特征:
1.一种履带式巡检机器人,其特征在于:包括车体(1)、离合组件(6)、离合驱动组件(7)和行走驱动组件(8);
2.根据权利要求1所述的一种履带式巡检机器人,其特征在于:所述离合组件(6)包括固定轴(61)、套筒(62)、驱动齿盘(63)和从动齿盘(64),所述套筒(62)有两个且分别转动连接于支撑板(18)的上端内部,所述固定轴(61)分别与相邻的套筒(62)内壁转动连接,所述驱动齿盘(63)设置于固定轴(61)的外弧面中部,所述从动齿盘(64)分别固定连接于两个套筒(62)的相对内侧端头,所述从动齿盘(64)均与固定轴(61)的外弧面转动连接,所述驱动齿盘(63)分别与两个从动齿盘(64)啮合连接,所述固定轴(61)的外弧面左右两端均套接有弹簧,所述弹簧分别位于驱动齿盘(63)和相邻的从动齿盘(64)之间。
3.根据权利要求2所述的一种履带式巡检机器人,其特征在于:所述行走驱动组件(8)包括立板(81)、电机二(82)、蜗杆(83)和蜗轮环(84),所述立板(81)对称设置于空腔(101)的内部底面,两个立板(81)之间转动连接有蜗杆(83),右侧的立板(81)右侧面设有电机二(82),所述蜗轮环(84)设置于驱动齿盘(63)的外弧面中部,所述蜗杆(83)和蜗轮环(84)啮合连接,所述电机二(82)的输出轴与蜗杆(83)的右端固定连接,所述电机二(82)的输入端电连接单片机(12)的输出端。
4.根据权利要求2所述的一种履带式巡检机器人,其特征在于:所述离合驱动组件(7)包括水平板(71)、电机一(72)、凸轮(73)和牵引盘(74),所述水平板(71)设置于空腔(101)的前后侧壁之间,所述水平板(71)的上表面中部设有电机一(72),所述电机一(72)的输出轴与水平板(71)中部设置的通孔内壁滑动连接,所述电机一(72)的输出轴下端设有凸轮(73),所述牵引盘(74)分别与驱动齿盘(63)中部设置的凹槽内壁滑动连接,所述凸轮(73)分别与两个牵引盘(74)配合设置,所述牵引盘(74)均与空腔(101)的底面滑动连接。
5.根据权利要求2所述的一种履带式巡检机器人,其特征在于:所述驱动齿盘(63)中部设置的凹槽外弧面均设有轴承(19),所述轴承(19)的外环外弧面分别与相邻的牵引盘(74)内弧面固定连接。
6.根据权利要求2所述的一种履带式巡检机器人,其特征在于:所述连接组件(5)包括内六角套筒(51)和外六角套筒(52),所述内六角套筒(51)分别设置于两个转筒(9)的相对内侧端头,所述外六角套筒(52)分别设置于两个套筒(62)的相背离外侧端头,所述内六角套筒(51)的内壁分别与相邻的外六角套筒(52)外表面滑动连接,所述固定轴(61)分别与内六角套筒(51)和外六角套筒(52)的内壁转动连接。
7.根据权利要求1所述的一种履带式巡检机器人,其特征在于:还包括固定板(15)和太阳能电池板(16),所述固定板(15)设置于车体(1)的上表面右端,所述太阳能电池板(16)设置于固定板(15)的上端,所述太阳能电池板(16)的输出端通过太阳能控制器与蓄电池(11)的输入端电连接。
8.根据权利要求1所述的一种履带式巡检机器人,其特征在于:所述车体(1)的前后侧面均设有护罩(10),所述护罩(10)分别与相邻的履带(4)配合设置。
技术总结
本技术公开了一种履带式巡检机器人,包括车体、离合组件、离合驱动组件和行走驱动组;车体:其左端对称转动连接有转筒,两个转筒的相背离外侧端头均设有驱动轮,车体的右端对称通过转轴转动连接有从动轮,驱动轮和横向对应的从动轮均通过履带传动连接,车体的上端内部设有电机三,电机三的输出轴顶端设有摄像机,车体的上表面分别设有单片机和GPRS数据传输器,车体的上端内部设有蓄电池,单片机的输入端电连接蓄电池的输出端,单片机的输出端电连接电机三的输入端,摄像机的输出端电连接单片机的输入端,该履带式巡检机器人,结构设计新颖,转向方便,扩大了巡检视角,延长了续航时间,提高了巡检效率。
技术研发人员:梁午昶
受保护的技术使用者:安翼机器人(江苏)有限公司
技术研发日:20230216
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!