一种基于防滑装置的巡检机器人的制作方法
本技术涉及巡检机器人,尤其涉及一种基于防滑装置的巡检机器人。
背景技术:
1、巡检机器人能够实现自定位、路径规划、智能感知、人脸识别、视频监控等行为,可以协助完成馆内的监控巡逻保安工作,实现动态巡检、无死角监控、异常预警,有效避免人工巡检的各种弊端。
2、现有行走巡检机器人工作环境比较复杂,其行走驱动方式一般分为轮胎式和履带式两种。履带驱动巡检机器人,履带和地面接触面积较大,防滑性能较好,但在平整路面行走,机器人的机动灵活性较差。轮胎驱动巡检机器人,虽然在平整路面行走机动性较好,但在泥泞路面、雪地等复杂路面行驶时,经常会出现打滑现象。
3、因此需要一种巡检机器人,可根据现场环境,将巡检机器人切换成轮胎驱动模式和履带驱动模式,适用于不同路面。
技术实现思路
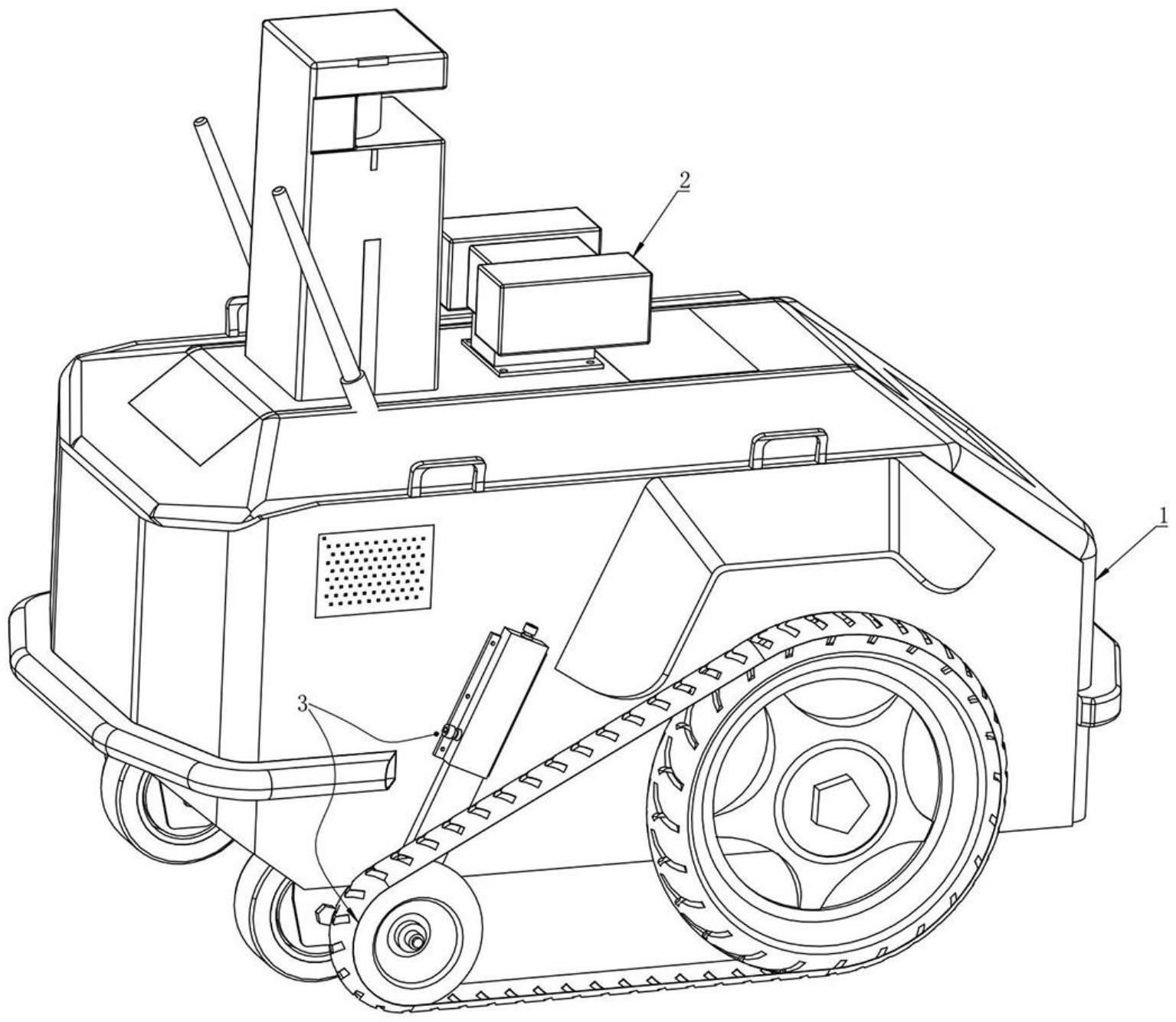
1、本实用新型所要解决的技术问题,是针对上述存在的技术不足,提供了一种基于防滑装置的巡检机器人,包括所述机器人机身两侧前方设置有主动轮,用于驱动巡检机器人行走,机器人机身底部后方设置有两组从动轮;快装防滑装置设置主动轮后方,通过快装防滑装置可实现轮胎驱动模式和履带驱动模式的切换,巡检机器人适用于不同路面。
2、为解决上述技术问题,本实用新型所采用的技术方案是:
3、一种基于防滑装置的巡检机器人,包括:机器人机身,其中机器人机身上设置有多组传感器;机器人机身顶部设置摄像头;以及机器人机身两侧对称设置快装防滑装置;快装防滑装置包括支撑结构和连接轮;其中机器人机身两侧前方设置有主动轮,连接轮和主动轮之间设置有防滑带;快装防滑装置设置主动轮后方;机身内部设置处理器,处理器电性连接传感器和摄像头。
4、快装防滑装置包括支撑结构和连接轮,所述支撑结构设置在机器人机身上,所述连接轮设置在支撑结构底部;连接轮和主动轮之间设置有防滑带,连接轮和主动轮通过防滑带连接传动。
5、支撑结构包括安装座和张紧杆,所述安装座两侧设置有连接板,所述连接板通过螺钉固定在机器人机身上,机器人机身上设置安装孔。
6、安装座下方设置有滑槽,张紧杆上方滑动连接在滑槽上,连接轮设置在张紧杆一侧下方。
7、连接轮和主动轮宽度相等,连接轮和主动轮在宽度方向上平行设置。
8、安装座顶部设置有固定座,所述固定座中部螺纹连接有螺杆,所述螺杆底部设置在张紧杆顶部,并通过螺杆将张紧杆向下压紧。
9、优选地,张紧杆一侧上方设置有卡槽,所述安装座一侧下方螺纹连接有定位螺栓,通过定位螺栓和卡槽配合将张紧杆和安装座固定锁紧。
10、优选地,滑槽向后侧下方倾斜;机器人机身上预设安装孔。
11、在定位螺栓和卡槽配合状态下,所述主动轮底部和连接轮底部平齐。
12、优选地,机器人机身后方设置有两组从动轮,所述从动轮设置在机器人机身底部。
13、本发明的有益效果在于,与现有技术相比,巡检机器人可基于快装防滑装置切换成轮胎驱动模式和履带驱动模式,适用于不同环境路面使用。在履带驱动模式下,防滑带的设置,大大增加了巡检机器人的抓地力,在雪地、泥泞等复杂路面行走时不会出现打滑现象。安装时只需通过螺钉将安装座固定在机器人机身一侧,然后通过转动张紧杆即可将防滑带张紧,最后通过转动定位螺栓,即可将张紧杆锁紧固定;同理,当松开安装座上的螺钉时,即可将防滑带松开,从而将快装防滑装置卸掉;通过快装防滑装置,可实现履带的快速装卸过程,操作简单,使用起来比较方便。
14、本实用新型的有益效果还包括:机器人机身后方设置有两组从动轮,从动轮设置在机器人机身底部,两组从动轮位于机器人机身底部,两组连接轮位于机器人机身两侧,在从动轮和连接轮互不接触干涉。
技术特征:
1.一种基于防滑装置的巡检机器人,其特征在于,包括:
2.根据权利要求1所述的一种基于防滑装置的巡检机器人,其特征在于,
3.根据权利要求2所述的一种基于防滑装置的巡检机器人,其特征在于,
4.根据权利要求3所述的一种基于防滑装置的巡检机器人,其特征在于,
5.根据权利要求4所述的一种基于防滑装置的巡检机器人,其特征在于,
6.根据权利要求4所述的一种基于防滑装置的巡检机器人,其特征在于,
7.根据权利要求4所述的一种基于防滑装置的巡检机器人,其特征在于,
8.根据权利要求4所述的一种基于防滑装置的巡检机器人,其特征在于,
9.根据权利要求5所述的一种基于防滑装置的巡检机器人,其特征在于,
10.根据权利要求1-9任一项所述的一种基于防滑装置的巡检机器人,其特征在于,
技术总结
一种基于防滑装置的巡检机器人,机器人机身,其中机器人机身上设置有多组传感器;机器人机身顶部设置摄像头;以及机器人机身两侧对称设置快装防滑装置;快装防滑装置包括支撑结构和连接轮;其中机器人机身两侧前方设置有主动轮,连接轮和主动轮之间设置有防滑带;快装防滑装置设置主动轮后方;机身内部设置处理器,处理器电性连接传感器和摄像头。通过快装防滑装置可实现轮胎驱动模式和履带驱动模式的切换,巡检机器人适用于不同路面。
技术研发人员:杨超,关胜杰
受保护的技术使用者:国能信控互联技术有限公司
技术研发日:20230324
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!