一种机器人移动底盘控制装置的制作方法
本技术涉及一种移动底盘控制装置,具体为机器人移动底盘控制装置,属于农业机械。
背景技术:
1、农作物种植范围广,南北方农作物种植种类多而且差异大,不同农作物的行距一般不同,同种农作物不同区域或者不同种植方式的行距一般也不同。在农作物的生长期,除草、喷药以及施肥等田间管理机械化作业要求作业车辆沿农作物行距行走,因此要求农用车辆底盘的轮距随农作物行距变化进行调节;
2、随着经济的发展,农业机械化水平处在不断提高的过程中,农用车辆底盘的变轮距技术是农业机械自动化的一个重要环节,但是现有移动底盘的轮距调节机构只能在使用前对其轮距进行单个调节,无法在正常使用时进行同步调节控制,灵活性低,为此,提出一种机器人移动底盘控制装置。
技术实现思路
1、有鉴于此,本实用新型提供一种机器人移动底盘控制装置,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
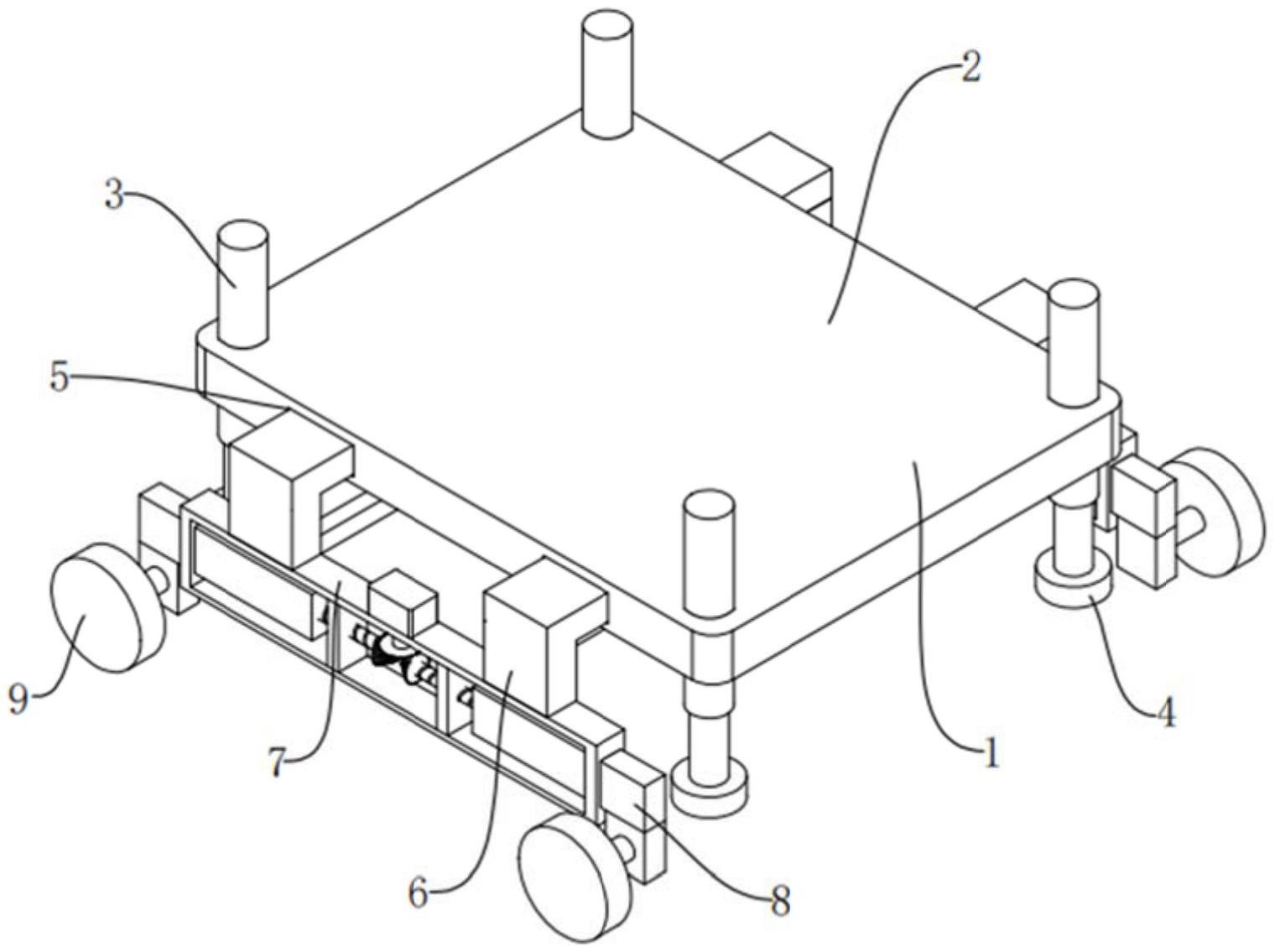
2、本实用新型实施例的技术方案是这样实现的:一种机器人移动底盘控制装置,包括调距组件,所述调距组件包括底盘主体、四个支撑板、四个l形板、四个行走轮、四个齿板、两个转动杆、两个啮合齿、l形块、第一驱动电机;
3、所述底盘主体上固定连接有四个液压缸,四个所述支撑板分别固定连接于对应的所述液压缸的输出端上,所述底盘主体的两侧均开设有两个限位槽,四个所述l形板分别滑动连接于对应的所述限位槽上,同一侧的两个所述l形板的底部焊接有同一个回形板,所述回形板上滑动连接有两个调节板,四个所述行走轮分别固定连接于对应的所述调节板的一侧,四个所述齿板分别固定连接于对应的所述l形板的一侧内壁上,两个所述转动杆的顶端转动连接于所述底盘主体的底部,所述转动杆上固定连接有皮带轮,两个所述皮带轮上传动连接有同一个皮带,两个所述啮合齿分别固定连接于对应的所述转动杆上,所述啮合齿与对应的两个所述齿板相啮合,所述l形块焊接于所述底盘主体的底部,所述第一驱动电机固定连接于所述l形块的底部,所述第一驱动电机的输出轴与两个转动杆中的一个转动杆的端部相焊接。
4、进一步优选的,所述调距组件的一侧设有调节组件,所述调节组件包括两个第二驱动电机、两个第一齿轮、两个固定块;
5、两个所述第二驱动电机分别固定连接于对应的所述回形板的顶部,两个所述第一齿轮分别固定连接于对应的所述第二驱动电机的输出轴上,两个所述固定块分别固定连接于对应的所述回形板的两侧内壁之间。
6、进一步优选的,所述固定块上转动连接有螺杆,所述螺杆与对应的所述调节板螺纹连接。
7、进一步优选的,所述螺杆的端部焊接有第二齿轮,所述第二齿轮与对应的第一齿轮相啮合。
8、进一步优选的,所述回形板的前侧内壁与后侧内壁上均开设有方孔,所述回形板通过方孔与对应的所述调节板滑动连接。
9、进一步优选的,所述固定块上开设有圆形孔,所述圆形孔的内壁上固定连接有轴承,所述轴承的内圈内侧与对应的螺杆的外侧相焊接。
10、进一步优选的,所述调节板上开设有螺纹槽,所述调节板通过螺纹槽与对应的螺杆螺纹连接。
11、进一步优选的,所述底盘主体上开设有四个通孔,所述底盘主体通过通孔与对有的液压缸的外侧固定连接。
12、本实用新型实施例由于采用以上技术方案,其具有以下优点:
13、本实用新型液压缸带动支撑板与地面接触并将行走轮撑起,第一驱动电机带动两个转动杆中的一个转动杆转动,转动杆通过皮带轮带动皮带转动,皮带通过另一个皮带轮带动另一个转动杆转动,转动杆通过啮合齿带动对应的两个齿板移动,齿板带动l形板在限位槽上滑动,l形板通过回形板带动调节板移动,调节板带动行走轮移动,使得相对的两个行走轮之间的间距发生变化,从而可以在使用的过程中对其同步进行调节控制,灵活性高。
14、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本实用新型进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种机器人移动底盘控制装置,包括调距组件(1),其特征在于:所述调距组件(1)包括底盘主体(2)、四个支撑板(4)、四个l形板(6)、四个行走轮(9)、四个齿板(10)、两个转动杆(11)、两个啮合齿(14)、l形块(15)、第一驱动电机(16);
2.根据权利要求1所述的机器人移动底盘控制装置,其特征在于:所述调距组件(1)的一侧设有调节组件(17),所述调节组件(17)包括两个第二驱动电机(18)、两个第一齿轮(19)、两个固定块(20);
3.根据权利要求2所述的机器人移动底盘控制装置,其特征在于:所述固定块(20)上转动连接有螺杆(21),所述螺杆(21)与对应的所述调节板(8)螺纹连接。
4.根据权利要求3所述的机器人移动底盘控制装置,其特征在于:所述螺杆(21)的端部焊接有第二齿轮(22),所述第二齿轮(22)与对应的第一齿轮(19)相啮合。
5.根据权利要求1所述的机器人移动底盘控制装置,其特征在于:所述回形板(7)的前侧内壁与后侧内壁上均开设有方孔,所述回形板(7)通过方孔与对应的所述调节板(8)滑动连接。
6.根据权利要求2所述的机器人移动底盘控制装置,其特征在于:所述固定块(20)上开设有圆形孔,所述圆形孔的内壁上固定连接有轴承,所述轴承的内圈内侧与对应的螺杆(21)的外侧相焊接。
7.根据权利要求1所述的机器人移动底盘控制装置,其特征在于:所述调节板(8)上开设有螺纹槽,所述调节板(8)通过螺纹槽与对应的螺杆(21)螺纹连接。
8.根据权利要求1所述的机器人移动底盘控制装置,其特征在于:所述底盘主体(2)上开设有四个通孔,所述底盘主体(2)通过通孔与对有的液压缸(3)的外侧固定连接。
技术总结
本技术提供了一种机器人移动底盘控制装置,包括调距组件,调距组件包括底盘主体、四个支撑板、四个L形板、四个行走轮、四个齿板、两个转动杆、两个啮合齿、L形块、第一驱动电机;所述底盘主体上固定连接有四个液压缸。本技术液压缸带动支撑板与地面接触并将行走轮撑起,第一驱动电机带动两个转动杆中的一个转动杆转动,转动杆通过皮带轮带动皮带转动,皮带通过另一个皮带轮带动另一个转动杆转动,转动杆通过啮合齿带动对应的两个齿板移动,齿板带动L形板在限位槽上滑动,L形板通过回形板带动调节板移动,调节板带动行走轮移动,使得相对的两个行走轮之间的间距发生变化,从而可以在使用的过程中对其同步进行调节控制,灵活性高。
技术研发人员:吴帆,彭若
受保护的技术使用者:深圳市纬尔科技有限公司
技术研发日:20230414
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!