一种小型农用机器人底盘
本技术涉及农用机械,具体是一种小型农用机人底盘。
背景技术:
1、随着农业机械化程度的逐年提升,农业生产效率有了更高的标准。近些年在以大数据为首的信息技术的推动下,智慧化和精准化成为农业发展的新目标,农业机器人逐渐渗透到农业生产的各个领域,其发展愈加迅猛,社会对小型智能农机的需求也大幅提升,市面上开始出现将工业设备用于农业生产的趋势。
2、现阶段市场及农业生产对小型智能农业装备需求迫切,农业智能机器人多由行走底盘和功能组件组合而成,但目前适用于以丘陵山地为代表的崎岖地形的农业机器人行走底盘较少,即现有底盘对农业作业场景的适应性较差。常见的机器人行走底盘大致可分为轮式和履带式,轮式底盘以agv底盘为代表,主要应用于地面情况良好的环境中,在工业物流与仓储等环节因其灵活性高,功耗低备受青睐,但在绝大多数农业场景下面临越障、运载能力不足的问题。履带式底盘相较于轮式而言负载能力大幅提升,且在复杂的农业场景中表现更佳。
3、然而现有的履带式底盘由于作业场景的不同,为配合与满足功能机械的正常使用要求,其长宽比往往大于1,而长宽比较大的底盘因地面摩擦与车身结构问题而无法顺畅实现原地转向,进而使得转弯半径较大,在一些狭窄或障碍物较多的场景下车辆无法顺利掉头,同时传统的倒梯形履带主要适用于大型载具,不适用小型载具,倒梯形履带着地面积小,坡道上翻车角度较小,爬坡时容易翻车。
技术实现思路
1、本实用新型的目的是提供一种小型农用机器人底盘,通过将履带式底盘本体的长宽比设计为1,可以使车辆实现原地转向,能够在一些狭窄或障碍物较多的场景下使得车辆能够顺利掉头,方便在崎岖地形农业场景下工作,同时采用等腰三角形设置的履带,使得在爬坡和下坡过程中都能保持稳定,防止发生偏移或运载能力不够。
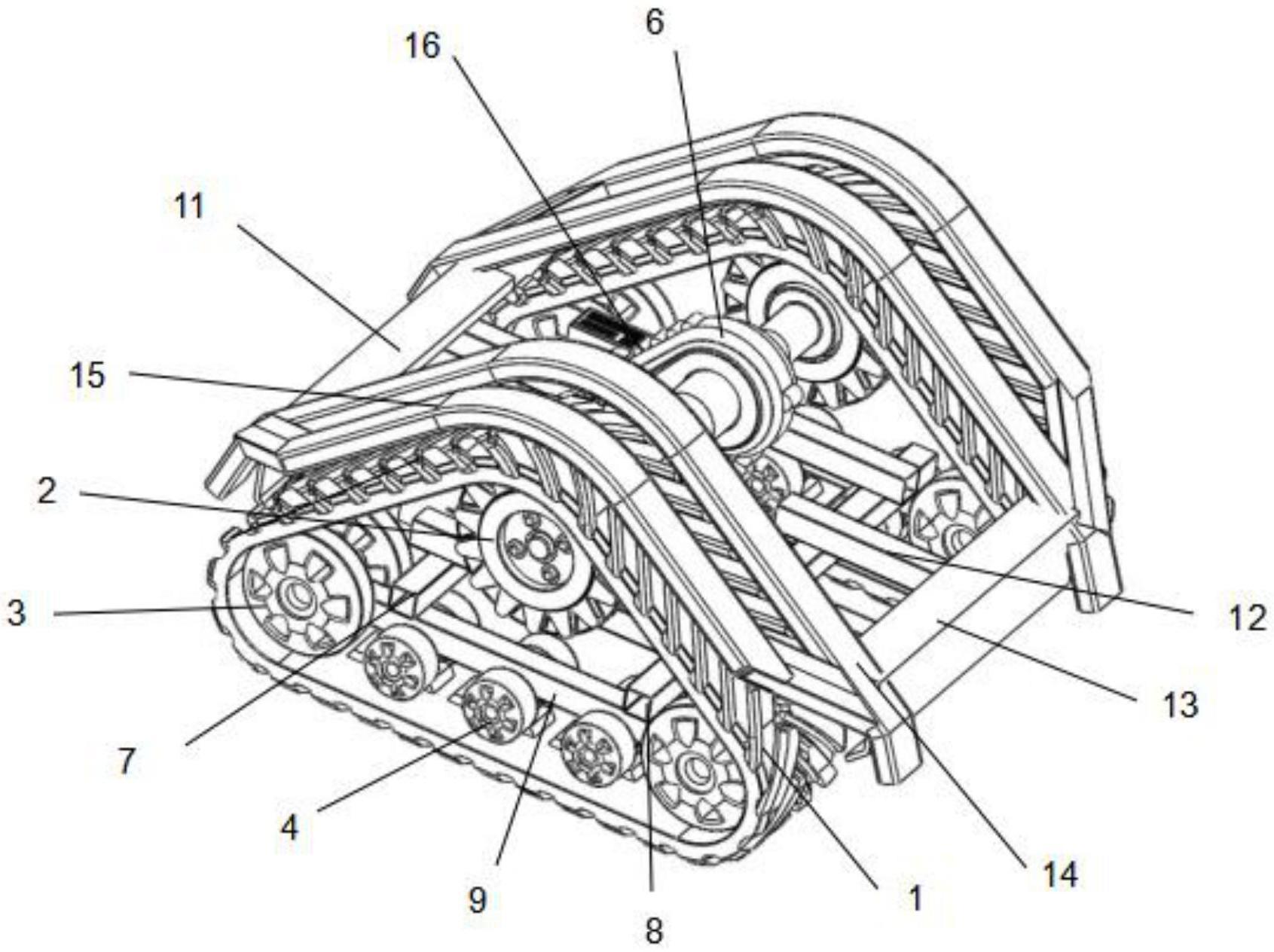
2、本实用新型的技术方案是:一种小型农用机器人底盘,包括履带式底盘本体和履带行走机构;履带式底盘本体的长度与宽度相同,所述履带行走机构包括两个履带、两个驱动电机和控制组件,两个履带设置在底盘架体的两侧,履带呈等腰三角形状,每个履带的内部啮合有驱动轮、两个张紧轮与多个负重轮,驱动轮设置在履带的顶部夹角处,两个张紧轮设置在履带底部两侧夹角处,多个负重轮设置在两个张紧轮之间,各张紧轮以及各负重轮与所述底盘架体转动连接;两个驱动电机设置在所述底盘架体上,每个驱动电机的输出轴上均连接有减速器,两个减速器的输出轴分别对应与两个驱动轮连接;控制组件与所述两个驱动电机电连接,用于控制两个驱动电机转动。
3、优选的,所述底盘架体包括前承重梁、后承重梁、两个连接梁、多个前连接梁、前挡板、多个后连接梁、后挡板和两个内连接梁,所述前承重梁和后承重梁平行设置,所述前承重梁和后承重梁之间通过两个连接梁固定连接,所述驱动电机和减速器均设置在前承重梁上,两个连接梁分别对应设置在两个履带的内部,所述张紧轮的轮轴和负重轮的轮轴均与连接梁转动连接,所述前挡板设置在前承重梁的前侧,前挡板与前承重梁之间通过多个前连接梁固定连接,所述后挡板设置在后承重梁的后侧,后挡板与后承重梁之间通过多个后连接梁固定连接,两个内连接梁的形状呈拱形,且对应设置在两个履带的上方,内连接梁的两端分别与所述前挡板和后挡板固定连接。
4、优选的,所述底盘架体的整体采用方钢一体焊接固定。
5、优选的,所述两个内连接梁的外侧均设有防护板,防护板呈拱形,且位于履带外侧边缘处的上方,防护板的两端与内连接梁的侧壁固定。
6、优选的,所述履带为人字形履带。
7、优选的,所述控制组件包括电机驱动器和遥控器,所述电机驱动器的控制板对应通道与遥控器接收器连接,在接收到遥控器发出的信号后,控制驱动电机转动。
8、优选的,所述控制组件包括电机驱动器和控制板,所述控制板通过rs通讯对电机驱动器进行控制,进而使通过电机驱动器控制驱动电机转动。
9、与现有技术相比,本实用新型的有益效果是:
10、1、本实用新型通过将履带式底盘本体的长宽比设计为1,整体尺寸相比传统履带底盘来说进行更加紧凑,在保证驱动轮轴弯矩符合设计要求和使用寿命的前提下,可以使车辆实现原地转向,能够在一些狭窄或障碍物较多的场景下使得车辆能够顺利掉头,方便在崎岖地形农业场景下工作,同时本实用新型采用等腰三角形设置的履带具有重心低、附着系数大,抗翻倾和下滑性能更好,同时还具有转弯半径小、爬坡能力强等特点,在山区和丘陵地带的农田、梯田作业中更具优势,在爬坡和下坡过程中都能保持稳定,防止发生偏移或运载能力不够。
11、2、本实用新型通过将底盘架体、采用焊接一体制成,最大程度的减少零件数,减少螺栓的使用量,大幅增强其可靠性大幅度,从而提高车架的稳定性,减小车架损坏几率。
12、3、本实用新型中的履带采用人字形履带,能够提高抓地能力,使得行驶在崎岖地形的道路上能够减少打滑现象的出现,提升行驶稳定性。
13、4、本实用新具有遥控控制和自动驾驶两种控制模式来控制底盘进行行进,能够满足不同使用者的需求。
技术特征:
1.一种小型农用机器人底盘,其特征在于,包括:
2.根据权利要求1所述的一种小型农用机器人底盘,其特征在于,所述底盘架体包括前承重梁(7)、后承重梁(8)、两个连接梁(9)、多个前连接梁(10)、前挡板(11)、多个后连接梁(12)、后挡板(13)和两个内连接梁(14),所述前承重梁(7)和后承重梁(8)平行设置,所述前承重梁(7)和后承重梁(8)之间通过两个连接梁(9)固定连接,所述驱动电机(5)和减速器(6)均设置在前承重梁(7)上,两个连接梁(9)分别对应设置在两个履带(1)的内部,所述张紧轮(3)的轮轴和负重轮(4)的轮轴均与连接梁(9)转动连接,所述前挡板(11)设置在前承重梁(7)的前侧,前挡板(11)与前承重梁(7)之间通过多个前连接梁(10)固定连接,所述后挡板(13)设置在后承重梁(8)的后侧,后挡板(13)与后承重梁(8)之间通过多个后连接梁(12)固定连接,两个内连接梁(14)的形状呈拱形,且对应设置在两个履带(1)的上方,内连接梁(14)的两端分别与所述前挡板(11)和后挡板(13)固定连接。
3.根据权利要求2所述的一种小型农用机器人底盘,其特征在于,所述底盘架体的整体采用方钢一体焊接固定。
4.根据权利要求2所述的一种小型农用机器人底盘,其特征在于,所述两个内连接梁(14)的外侧均设有防护板(15),防护板(15)呈拱形,且位于履带(1)外侧边缘处的上方,防护板(15)的两端与内连接梁(14)的侧壁固定。
5.根据权利要求1所述的一种小型农用机器人底盘,其特征在于,所述履带(1)为人字形履带。
6.根据权利要求1所述的一种小型农用机器人底盘,其特征在于,所述控制组件包括电机驱动器(16)和遥控器(17),所述电机驱动器(16)的控制板对应通道与遥控器接收器(18)连接,在接收到遥控器(17)发出的信号后,控制驱动电机(5)转动。
7.根据权利要求1所述的一种小型农用机器人底盘,其特征在于,所述控制组件包括电机驱动器(16)和控制板,所述控制板通过rs485通讯对电机驱动器(16)进行控制,进而使通过电机驱动器(16)控制驱动电机(5)转动。
技术总结
本技术公开了一种小型农用机器人底盘,包括履带式底盘本体和履带行走机构;履带式底盘本体的长度与宽度相同,履带行走机构包括两个履带、两个驱动电机和控制组件,两个履带设置在底盘架体的两侧,履带呈等腰三角形状,每个履带的内部啮合有驱动轮、两个张紧轮与多个负重轮;两个驱动电机设置在底盘架体上,每个驱动电机均通过减速器对应与两个驱动轮连接;控制组件与两个驱动电机电连接。本技术通过将履带式底盘本体的长宽比设计为1,可以使车辆实现原地转向,能够在一些狭窄或障碍物较多的场景下使得车辆能够顺利掉头,同时采用等腰三角形设置的履带,使得在爬坡和下坡过程中都能保持稳定,防止发生偏移或运载能力不够。
技术研发人员:郑路,张啸,郭珊睿,李欣蔚
受保护的技术使用者:中国农业大学
技术研发日:20230420
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!