一种可堆叠多层的运输机器人的制作方法
本技术涉及运输机器人,具体地说,涉及一种可堆叠多层的运输机器人。
背景技术:
1、运输机器人是一款无线遥控的运输车辆,可以在不同路况的建筑工地运送建筑物料或工具,运输车辆可以取替人手处理及搬运重型物件,从而减低工伤机会及提升工作效率,在工作人员去对货物进行运输时,需要工作人员借助运输机器人去对货物进行运输,由于运输机器人的顶端周围未设置遮挡物,依次堆叠货物的过程中,货物容易产生错位叠加,导致在运输的过程中,堆叠的货物容易发生掉落,为此我们亟需提供一种可堆叠多层的运输机器人。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型的目的在于提供一种可堆叠多层的运输机器人,可以去对运输机器人顶端进行堆叠货物,并且防止货物在运输的过程中发生掉落。
3、(二)技术方案
4、为实现上述目的,本实用新型提供如下技术方案,一种可堆叠多层的运输机器人,所采用的技术方案是:包括机箱,所述机箱的内侧壁固定连接有固定框,所述固定框的内部开设有收放槽,所述收放槽的内侧壁固定连接有电机,所述电机的两端输出轴通过联轴器固定连接有连接杆,所述连接杆的外部螺纹连接有套板,所述套板的顶端转动连接有活动板,所述活动板的一端转动连接有折叠杆。
5、所述收放槽的内侧壁固定连接有伸缩杆,所述伸缩杆的顶端固定连接有放置板,所述折叠杆的内侧壁固定连接有拉伸弹簧。
6、作为优选方案,所述放置板的外侧开设有凹槽,所述凹槽的内壁两侧均转动连接有转动齿轮,所述凹槽的内侧壁滑动连接有拉板,所述转动齿轮的一侧均固定连接有螺纹杆,所述螺纹杆的外部螺纹连接有滑块,所述放置板的顶端开设有活动槽,所述滑块的顶端固定连接有挡板,所述放置板的顶端固定连接有固定板,所述固定板的内侧壁固定连接有套杆,在工作人员去将运输机器人进行使用时,可以方便工作人员去将物品进行堆放。
7、作为优选方案,所述螺纹杆的外壁均匀固定连接有螺纹,所述滑块的内部开设有螺纹槽,在工作人员去将运输机器人进行使用时,可以使螺纹杆转动带动滑块进行滑动。
8、作为优选方案,所述活动槽的内侧壁开设有限位槽,所述滑块的外侧壁固定连接有限位块,且限位槽的内侧壁滑动连接有限位块,在工作人员去将运输机器人进行使用时,可以对滑块进行限位。
9、作为优选方案,所述拉板的顶端开设有齿槽,且齿槽的尺寸和转动齿轮的尺寸相同,所述拉板和转动齿轮的连接方式设置为啮合连接,在工作人员去将运输机器人进行使用时,可以使拉板滑动带动转动齿轮进行转动。
10、作为优选方案,所述固定框的顶端均匀开设有滑槽,且滑槽的内部贯穿设置有连接杆,且滑槽和收放槽的内部设置为相互贯穿,在工作人员去将运输机器人进行使用时,可以使机器人进行升降。
11、作为优选方案,所述放置板水平垂直设置在收放槽的上方,所述机箱的顶端开设有贯穿槽,且贯穿槽和收放槽的内部设置为相互贯穿,在工作人员去将运输机器人进行使用时,可以方便机器人将物品进行升举。
12、(三)有益效果
13、与现有技术相比,本实用新型提供了一种可堆叠多层的运输机器人,具备以下有益效果:
14、1、本实用新型通过设置电机、连接杆、套板、活动板、折叠杆,通过启动电机,可以使电机输出轴通过联轴器带动连接杆进行转动,使连接杆转动带动外部螺纹连接的套板进行滑动,使套板带动活动板进行翻转,通过活动板的一端转动连接有折叠杆,可以使外侧转动连接有折叠杆的伸缩杆进行上升,从而可以对底端固定连接有伸缩杆的放置板进行升降。
15、2、本实用新型通过设置套杆、挡板、转动齿轮、螺纹杆、滑块,通过滑动凹槽内侧壁滑动连接的拉板,可以使拉板滑动带动转动齿轮进行转动,使转动齿轮一端固定连接的螺纹杆进行转动,从而可以使外部螺纹连接的滑块进行滑动,使底端固定连接有滑块的挡板进行滑动,使挡板在套杆的外部进行滑动,使挡板对放置在放置板顶端的物品进行夹紧限位,可以去对货物进行堆叠。
技术特征:
1.一种可堆叠多层的运输机器人,包括机箱(1),其特征在于:所述机箱(1)的内侧壁固定连接有固定框(9),所述固定框(9)的内部开设有收放槽(10),所述收放槽(10)的内侧壁固定连接有电机(8),所述电机(8)的两端输出轴通过联轴器固定连接有连接杆(11),所述连接杆(11)的外部螺纹连接有套板(12),所述套板(12)的顶端转动连接有活动板(13),所述活动板(13)的一端转动连接有折叠杆(14);
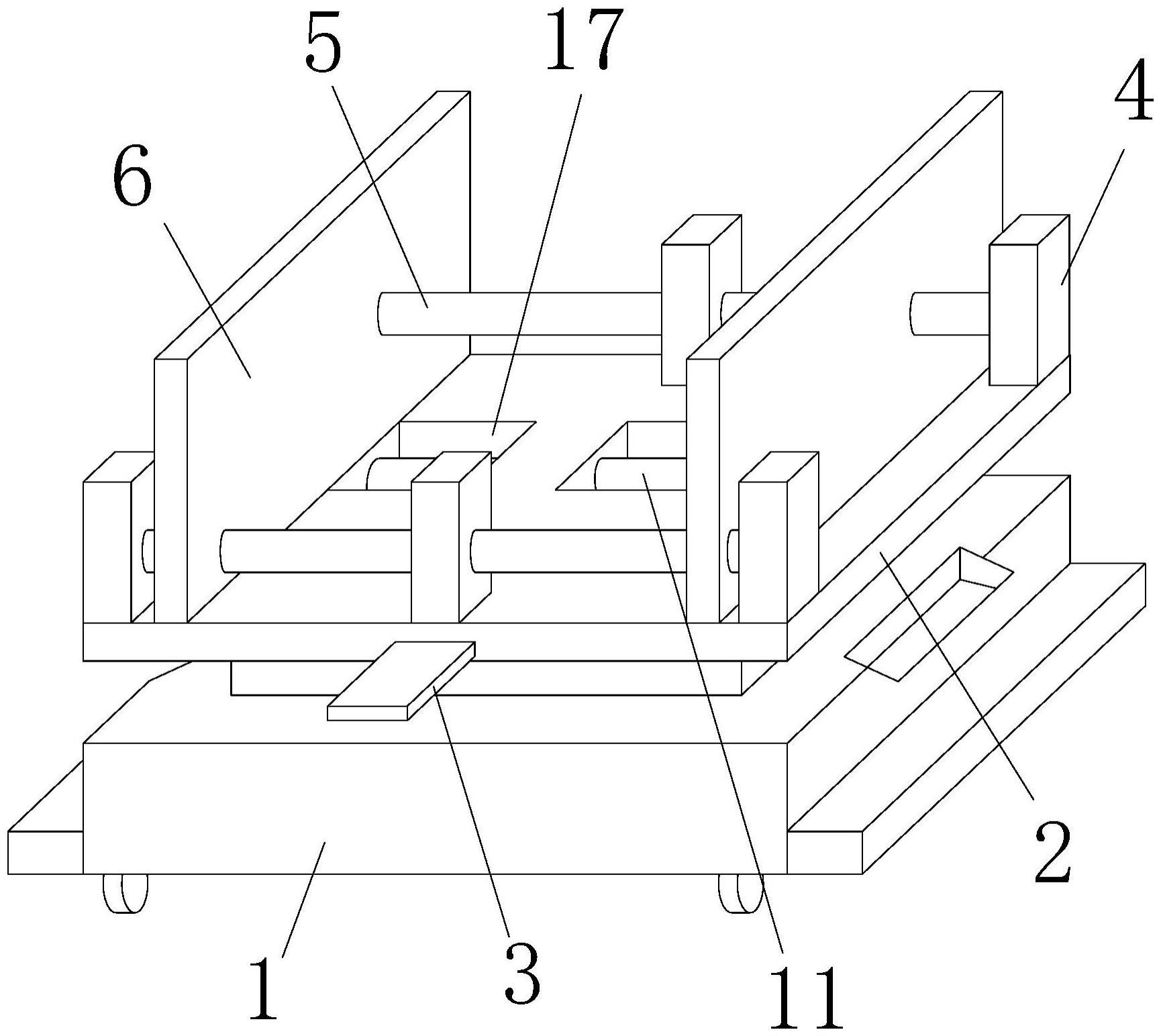
2.根据权利要求1所述的一种可堆叠多层的运输机器人,其特征在于:所述放置板(2)的外侧开设有凹槽(20),所述凹槽(20)的内壁两侧均转动连接有转动齿轮(16),所述凹槽(20)的内侧壁滑动连接有拉板(3),所述转动齿轮(16)的一侧均固定连接有螺纹杆(18),所述螺纹杆(18)的外部螺纹连接有滑块(19),所述放置板(2)的顶端开设有活动槽(17),所述滑块(19)的顶端固定连接有挡板(6),所述放置板(2)的顶端固定连接有固定板(4),所述固定板(4)的内侧壁固定连接有套杆(5)。
3.根据权利要求2所述的一种可堆叠多层的运输机器人,其特征在于:所述螺纹杆(18)的外壁均匀固定连接有螺纹,所述滑块(19)的内部开设有螺纹槽。
4.根据权利要求2所述的一种可堆叠多层的运输机器人,其特征在于:所述活动槽(17)的内侧壁开设有限位槽,所述滑块(19)的外侧壁固定连接有限位块,且限位槽的内侧壁滑动连接有限位块。
5.根据权利要求2所述的一种可堆叠多层的运输机器人,其特征在于:所述拉板(3)的顶端开设有齿槽,且齿槽的尺寸和转动齿轮(16)的尺寸相同,所述拉板(3)和转动齿轮(16)的连接方式设置为啮合连接。
6.根据权利要求1所述的一种可堆叠多层的运输机器人,其特征在于:所述固定框(9)的顶端均匀开设有滑槽,且滑槽的内部贯穿设置有连接杆(11),且滑槽和收放槽(10)的内部设置为相互贯穿。
7.根据权利要求1所述的一种可堆叠多层的运输机器人,其特征在于:所述放置板(2)水平垂直设置在收放槽(10)的上方,所述机箱(1)的顶端开设有贯穿槽,且贯穿槽和收放槽(10)的内部设置为相互贯穿。
技术总结
本技术涉及运输机器人技术领域,且公开了一种可堆叠多层的运输机器人,包括机箱,所述机箱的内侧壁固定连接有固定框,所述固定框的内部开设有收放槽,所述收放槽的内侧壁固定连接有电机,所述电机的两端输出轴通过联轴器固定连接有连接杆,所述连接杆的外部螺纹连接有套板。本技术通过设置电机、连接杆、套板、活动板、折叠杆,通过启动电机,可以使电机输出轴通过联轴器带动连接杆进行转动,使连接杆转动带动外部螺纹连接的套板进行滑动,使套板带动活动板进行翻转,通过活动板的一端转动连接有折叠杆,可以使外侧转动连接有折叠杆的伸缩杆进行上升,从而可以对底端固定连接有伸缩杆的放置板进行升降。
技术研发人员:王志明
受保护的技术使用者:江苏铭爵物流设备科技有限公司
技术研发日:20230505
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!