一种多适配性多场景应用的无障碍吸附式机械脚
本技术涉及一种机械脚,特别涉及一种多适配性多场景应用的无障碍吸附式机械脚。
背景技术:
1、随着科技的进步与发展,机器人在人类生活中起到越来越重要的作用,尤其是在高危或极端条件下,机器人都可以代替人类完成作业。但是,目前市面上或者处于研发阶段的机器人应用场景都具有专用性,不能满足多场景下变换作业,其中最主要的原因就是机器人运动结构单一,无法适应多地形的行进,多采用轮式结构或机械腿式结构,轮式结构稳定但自由度有限,结构复杂;机械腿式结构自由度虽高但不够平稳,对于倾斜角度较大的路面机器人抓地不牢固容易倾倒。此外,现有的机器人运动结构与机器人通常为一体设计,不可拆卸,不能单独使用,不具有多场景、不同机器人的多适配性。
技术实现思路
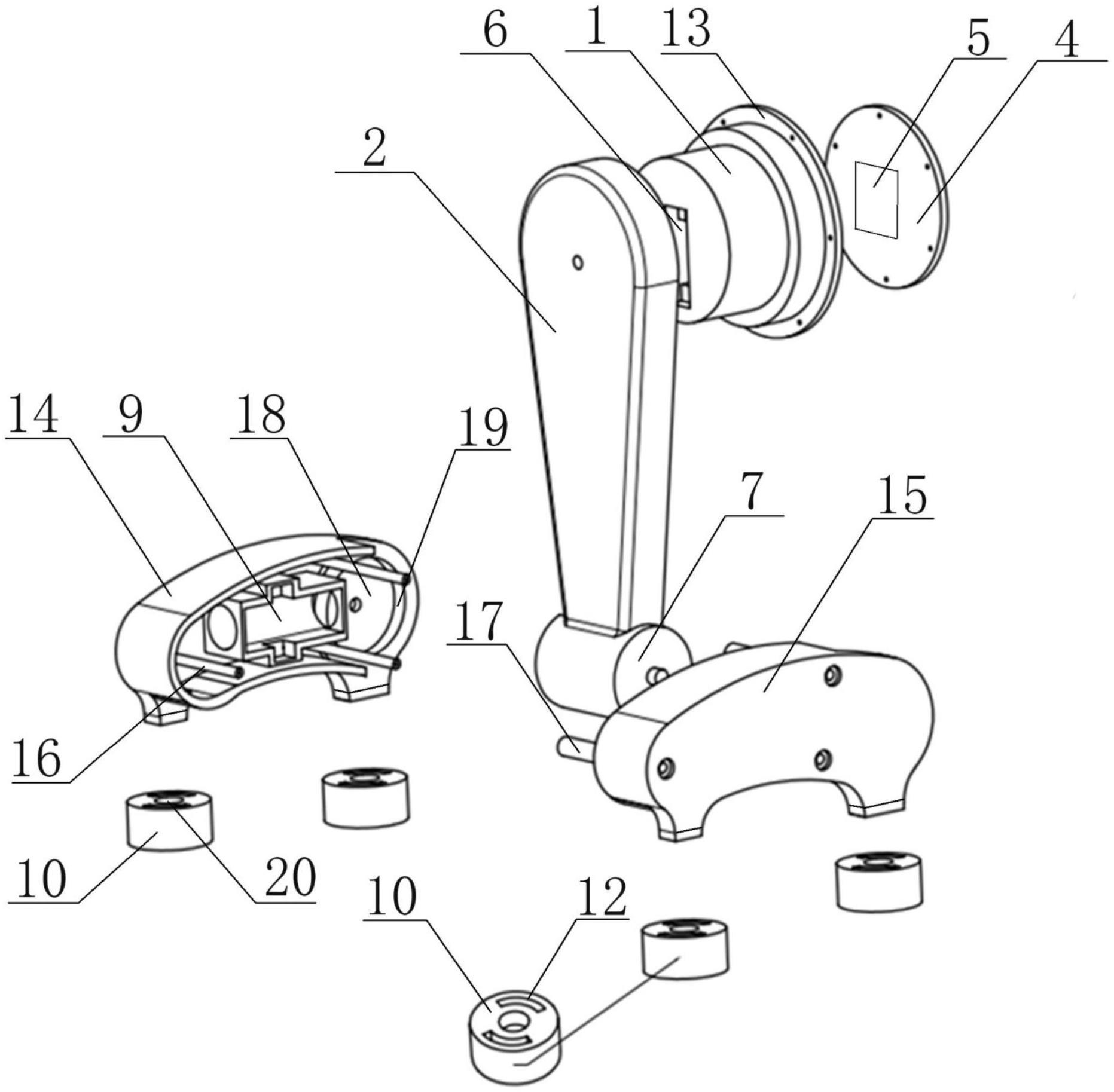
1、本实用新型为了解决上述技术问题,提供一种多适配性多场景应用的无障碍吸附式机械脚,包括连接关节、直立臂和吸附臂,所述的连接关节内一端设有总成板,总成板上设有总控制器,另一端设有第一舵机,第一舵机的输出轴从连接关节端部伸出并与直立臂上部相连;所述的直立臂内设有电池,直立臂的下部设有第二舵机,第二舵机横向设置,第二舵机的轴向与第一舵机的轴向垂直;所述的吸附臂一端与直立臂下部通过第二舵机相连;吸附臂内设有气泵,吸附臂的下部设有数个软体吸盘柱,每个吸盘柱的底面设有通气孔,吸盘柱内部设有与通气孔相连的导管通孔,气泵输出端通过导气管穿过吸盘柱内的导管通孔与吸盘柱底部的通气孔相连通;第一舵机、第二舵机和气泵分别与总控制器和电池相连。
2、所述的连接关节为阶梯圆台型,内部为中空结构,大直径的一端外圈设有法兰,法兰上设有连接孔;第一舵机设在小直径的一端,第一舵机的输出轴从小直径的一端伸出与直立臂相连;总控制器位于连接关节的内部。
3、所述的吸附臂包括第一吸附臂壳体和第二吸附臂壳体,第一吸附臂壳体和第二吸附臂壳体之间通过插接杆和插接孔插接扣合;吸附臂与直立臂相连的一端壳体上开设有限位槽,壳体内设有舵机连接槽,直立臂的第二舵机穿过限位槽与吸附臂相连,其中第二舵机一端的输出轴与一侧的吸附臂壳体相连,第二舵机的另一端与另一侧吸附臂壳体内的舵机连接槽通过圆环轴承相连。
4、所述的吸附臂的下部设有至少四个吸盘柱,分别位于吸附臂底部四个方位角;所述的吸盘柱上部通过球铰轴承与吸附臂下部的球铰座相连,吸盘柱的底面为内凹型吸盘结构,通气孔设在吸盘中部。
5、所述的吸附臂外缘均为光滑圆弧形边缘。
6、所述的总控制器为单片机。
7、本实用新型的工作原理:
8、本实用新型能够通过连接关节安装在不同载体上,通过连接关节的法兰,与被安装的机器人之间采用螺栓进行连接,给不同的机器人提供行动能力。一个机器人上至少安装四组本实用新型机械脚,分别设在机器人前端左右两侧和后端左右两侧。
9、本实用新型中,总控制器控制第一舵机输出正反转矩,能够带动直立臂以第一舵机输出轴轴心进行前后两方向的摆动;总控制器控制第二舵机输出正反转矩,能够带动吸附臂以第二舵机输出轴的轴心进行上下两方向的摆动;直立臂与吸附臂共同起到支撑和行进的作用。
10、吸附臂下端设置的吸盘柱底面与底面接触,起到支撑和抓地作用:总控制器控制气泵抽气或放气,气泵抽气时,通过导气管抽走吸盘柱底面吸盘内的空气,使吸盘牢牢吸附于行走表面上,能够给作业机器人提供一个稳固的支撑结构,防止发生倾倒;吸盘柱与吸附臂之间的球铰轴承能够使吸盘柱多角度旋转摆动,可以适应多角度的接触面;当需要变换位移时,总控制器控制气泵放气,吸盘柱脱离行走面。
11、本实用新型的有益效果:
12、本实用新型提供的一种可拆卸、多适配性、多场景应用的无障碍吸附式机械脚属于机器人领域的一个拓展模块,实现单核多模块应用。本实用新型机械脚可拆卸,可自由适配于不同功能的机器人,节省资源;同时可舍弃机器人主体,能够独立运行,直接连接于不同物体上,实现多主体应用,不再拘泥于专用场景,增加了使用多样性。本实用新型机械脚能够在倾斜角度较大的路面实现稳固抓地,降低机器人倾倒的风险,在特殊作业环境下,给特种作业机器人提供良好、稳固的运动系统。
技术特征:
1.一种多适配性多场景应用的无障碍吸附式机械脚,其特征在于:包括连接关节、直立臂和吸附臂,所述的连接关节内一端设有总成板,总成板上设有总控制器,另一端设有第一舵机,第一舵机的输出轴从连接关节端部伸出并与直立臂上部相连;所述的直立臂内设有电池,直立臂的下部设有第二舵机,第二舵机横向设置,第二舵机的轴向与第一舵机的轴向垂直;所述的吸附臂一端与直立臂下部通过第二舵机相连;吸附臂内设有气泵,吸附臂的下部设有数个软体吸盘柱,每个吸盘柱的底面设有通气孔,吸盘柱内部设有与通气孔相连的导管通孔,气泵输出端通过导气管穿过吸盘柱内的导管通孔与吸盘柱底部的通气孔相连通;第一舵机、第二舵机和气泵分别与总控制器和电池相连。
2.根据权利要求1所述的一种多适配性多场景应用的无障碍吸附式机械脚,其特征在于:所述的连接关节为阶梯圆台型,内部为中空结构,大直径的一端外圈设有法兰,法兰上设有连接孔;第一舵机设在小直径的一端,第一舵机的输出轴从小直径的一端伸出与直立臂相连;总控制器位于连接关节的内部。
3.根据权利要求1所述的一种多适配性多场景应用的无障碍吸附式机械脚,其特征在于:所述的吸附臂包括第一吸附臂壳体和第二吸附臂壳体,第一吸附臂壳体和第二吸附臂壳体之间通过插接杆和插接孔插接扣合;吸附臂与直立臂相连的一端壳体上开设有限位槽,壳体内设有舵机连接槽,直立臂的第二舵机穿过限位槽与吸附臂相连,其中第二舵机一端的输出轴与一侧的吸附臂壳体相连,第二舵机的另一端与另一侧吸附臂壳体内的舵机连接槽通过圆环轴承相连。
4.根据权利要求1所述的一种多适配性多场景应用的无障碍吸附式机械脚,其特征在于:所述的吸附臂的下部设有至少四个吸盘柱,分别位于吸附臂底部四个方位角;所述的吸盘柱上部通过球铰轴承与吸附臂下部的球铰座相连,吸盘柱的底面为内凹型吸盘结构,通气孔设在吸盘中部。
5.根据权利要求1所述的一种多适配性多场景应用的无障碍吸附式机械脚,其特征在于:所述的吸附臂外缘均为光滑圆弧形边缘。
6.根据权利要求1所述的一种多适配性多场景应用的无障碍吸附式机械脚,其特征在于:所述的总控制器为单片机。
技术总结
本技术提供一种多适配性多场景应用的无障碍吸附式机械脚,包括连接关节、直立臂和吸附臂,连接关节与直立臂上部相连;直立臂下部与吸附臂相连;吸附臂内设有气泵,吸附臂的下部设有数个软体吸盘柱,每个吸盘柱的底面设有通气孔,气泵输出端通过导气管穿过吸盘柱内的导管通孔与吸盘柱底部的通气孔相连通;本技术属于机器人领域的一个拓展模块,能够通过连接关节安装在不同载体上,可自由适配于不同功能的机器人,本技术机械脚能够在倾斜角度较大的路面实现稳固抓地,降低机器人倾倒的风险,在特殊作业环境下,给特种作业机器人提供良好、稳固的运动系统。
技术研发人员:段彬,钟文欣,王思晴,郝予之,熊君遥,许健烨
受保护的技术使用者:吉林大学
技术研发日:20230512
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!