一种可平稳驮载物料的运料机器人的制作方法
本技术涉及运料装置,具体为一种可平稳驮载物料的运料机器人。
背景技术:
1、在生产加工的过程中,需要对产品或者物料进行位置的移动,在早些时候一般时工作人员使用小推车进行移动,随着科技的发展,出现了运料机器人,通过固定的路线规划,自动的将物品从初始点移动至终点,大大减少了工作人员的负担。
2、现有的运料机器人,进行物料的运输时,大多直接利用推盘进行移动,导致物料在移动过程中,容易受到冲击造成损坏,影响运料机器人实际使用时的效果,并且现有的运料机器人,一般只能通过充电座进行电力的补充,运料机器人进行充电时无法使用,造成后续流程的无法进行,影响运料机器人实际使用时的工作效率,为此我们提出了一种可平稳驮载物料的运料机器人。
技术实现思路
1、本实用新型的目的在于提供一种可平稳驮载物料的运料机器人,以解决上述背景技术中提出了大多直接利用推盘进行移动,一般只能通过充电座进行电力的补充的问题。
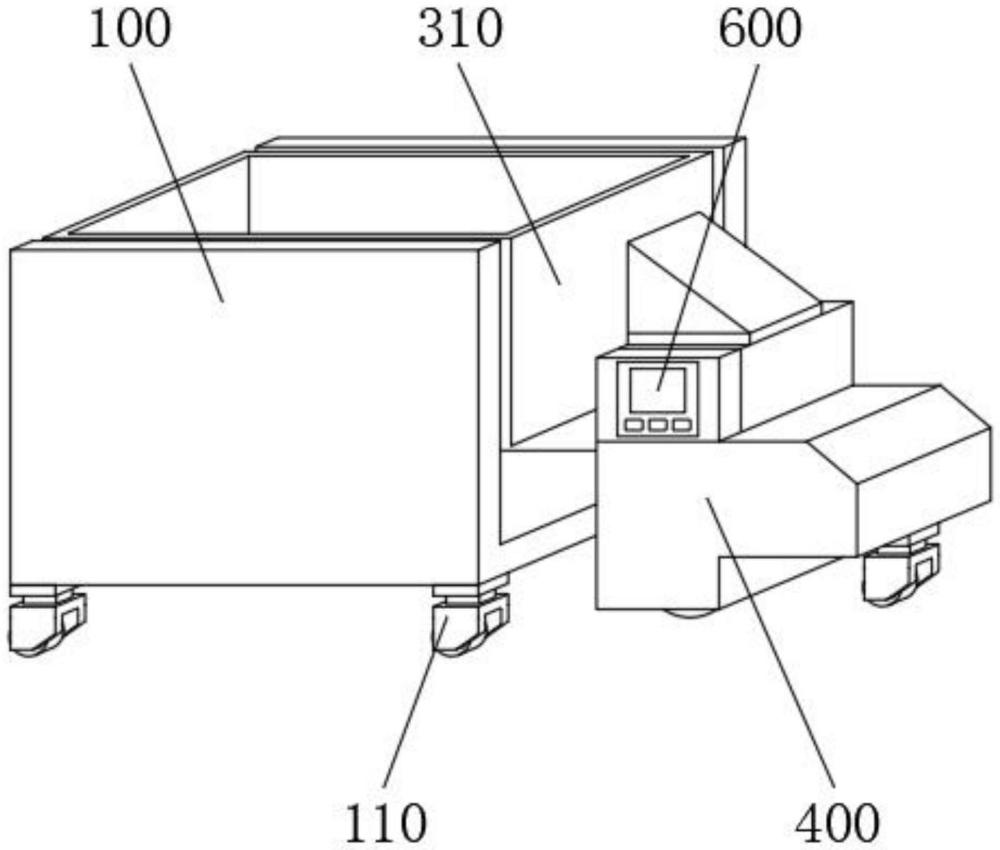
2、为实现上述目的,本实用新型提供如下技术方案:一种可平稳驮载物料的运料机器人,包括安装架、第一缓震装置、第二缓震装置、机器人装置、连接块和电控装置,所述第一缓震装置固定连接在所述安装架的内腔前后侧壁,所述第二缓震装置固定连接在所述安装架的内腔底部中间,所述机器人装置转动连接在所述安装架的右端,所述连接块位于所述机器人装置的上侧,所述电控装置固定连接在所述机器人装置的顶部前侧,所述第一缓震装置的末端转动连接有连接杆。
3、作为上述方案的进一步描述:
4、所述安装架的底部四角固定连接有万向轮。
5、作为上述方案的进一步描述:
6、所述第二缓震装置的顶部固定连接有物料箱,所述连接杆转动连接在所述物料箱的底部前后两侧,所述物料箱的左侧壁铰接有盖板。
7、作为上述方案的进一步描述:
8、所述机器人装置的顶部后侧固定连接有蓄电装置,且所述连接块固定连接在所述蓄电装置的顶部。
9、作为上述方案的进一步描述:
10、所述连接块的顶部固定连接有光伏模组装置。
11、作为上述方案的进一步描述:
12、所述电控装置电性连接所述机器人装置、蓄电装置和光伏模组装置。
13、与现有技术相比,本实用新型的有益效果是:
14、1、该可平稳驮载物料的运料机器人,在进行物料的运输时,通过连接杆传递震动至第一缓震装置,第一缓震装置和第二缓震装置,同时进行伸缩形变,消耗震动产生的冲击力,增加了运料机器人运输中对物料的保护,提高了运料机器人运输物料时的稳定,有利于运料机器人实际使用时的效果。
15、2、该可平稳驮载物料的运料机器人,在白天使用时,利用光伏模组装置收集光能,并将光能转化成电力,储存在蓄电装置的内部,运料机器人使用时通过蓄电装置进行供电,实现了运料机器人光能补充电力的功能,有利于后续流程的正常进行,提高了运料机器人实际使用时的工作效率。
技术特征:
1.一种可平稳驮载物料的运料机器人,其特征在于:包括安装架(100)、第一缓震装置(200)、第二缓震装置(300)、机器人装置(400)、连接块(500)和电控装置(600),所述第一缓震装置(200)固定连接在所述安装架(100)的内腔前后侧壁,所述第二缓震装置(300)固定连接在所述安装架(100)的内腔底部中间,所述机器人装置(400)转动连接在所述安装架(100)的右端,所述连接块(500)位于所述机器人装置(400)的上侧,所述电控装置(600)固定连接在所述机器人装置(400)的顶部前侧,所述第一缓震装置(200)的末端转动连接有连接杆(210)。
2.根据权利要求1所述的一种可平稳驮载物料的运料机器人,其特征在于:所述安装架(100)的底部四角固定连接有万向轮(110)。
3.根据权利要求1所述的一种可平稳驮载物料的运料机器人,其特征在于:所述第二缓震装置(300)的顶部固定连接有物料箱(310),所述连接杆(210)转动连接在所述物料箱(310)的底部前后两侧,所述物料箱(310)的左侧壁铰接有盖板(320)。
4.根据权利要求1所述的一种可平稳驮载物料的运料机器人,其特征在于:所述机器人装置(400)的顶部后侧固定连接有蓄电装置(410),且所述连接块(500)固定连接在所述蓄电装置(410)的顶部。
5.根据权利要求1所述的一种可平稳驮载物料的运料机器人,其特征在于:所述连接块(500)的顶部固定连接有光伏模组装置(510)。
6.根据权利要求1所述的一种可平稳驮载物料的运料机器人,其特征在于:所述电控装置(600)电性连接所述机器人装置(400)、蓄电装置(410)和光伏模组装置(510)。
技术总结
本技术公开了运料装置技术领域的一种可平稳驮载物料的运料机器人,包括安装架、第一缓震装置、第二缓震装置、机器人装置、连接块和电控装置,所述第一缓震装置固定连接在所述安装架的内腔前后侧壁,所述第二缓震装置固定连接在所述安装架的内腔底部中间,所述机器人装置转动连接在所述安装架的右端,所述连接块位于所述机器人装置的上侧,该可平稳驮载物料的运料机器人,结构设计合理,增加了运料机器人运输中对物料的保护,提高了运料机器人运输物料时的稳定,有利于运料机器人实际使用时的效果,实现了运料机器人光能补充电力的功能,有利于后续流程的正常进行,提高了运料机器人实际使用时的工作效率。
技术研发人员:钱一苇
受保护的技术使用者:江苏三体智能装备有限公司
技术研发日:20230616
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!