一种用于搬运机器人的搬运装置的制作方法
本技术涉及搬运装置,尤其是涉及一种用于搬运机器人的搬运装置。
背景技术:
1、机器人是自动执行工作的机器装置,包括一切模拟人类行为或思想与模拟其他生物的机械。机器人可代替或协助人类完成各种工作,凡是枯燥的、危险的、有毒的、有害的工作,都可由机器人大显身手。机器人是工业及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。目前在工业企业中,机器人需要长距离搬运时,一般采用搬运车等装置进行搬运,需要先将机器人搬到搬运车,而一些机器人重量较大,人工搬动费时费力,且容易造成机器人设备的损坏。
2、经检索发现申请号为cn202120214715.2提出的一种用于搬运机器人的搬运装置,无需人工搬运,节省人力,并且也避免了人工搬动过程中对机器人设备造成损害;另外在侧板的侧面设置防滑条,增加机器人底部与侧板之间的摩擦力;等装载好机器人之后,反方向转动旋转把手,使侧板回到初始位置即可。
3、但上述该装置存在以下弊端:虽然设置有可运输机器人的结构,但也需要人力推动才能够进入到装置中,而且设置有的倾斜角度过大,机器人重量过高,很容易在装卸时出现危险,实用性较低,因此针对上述问题需要作出改进。
技术实现思路
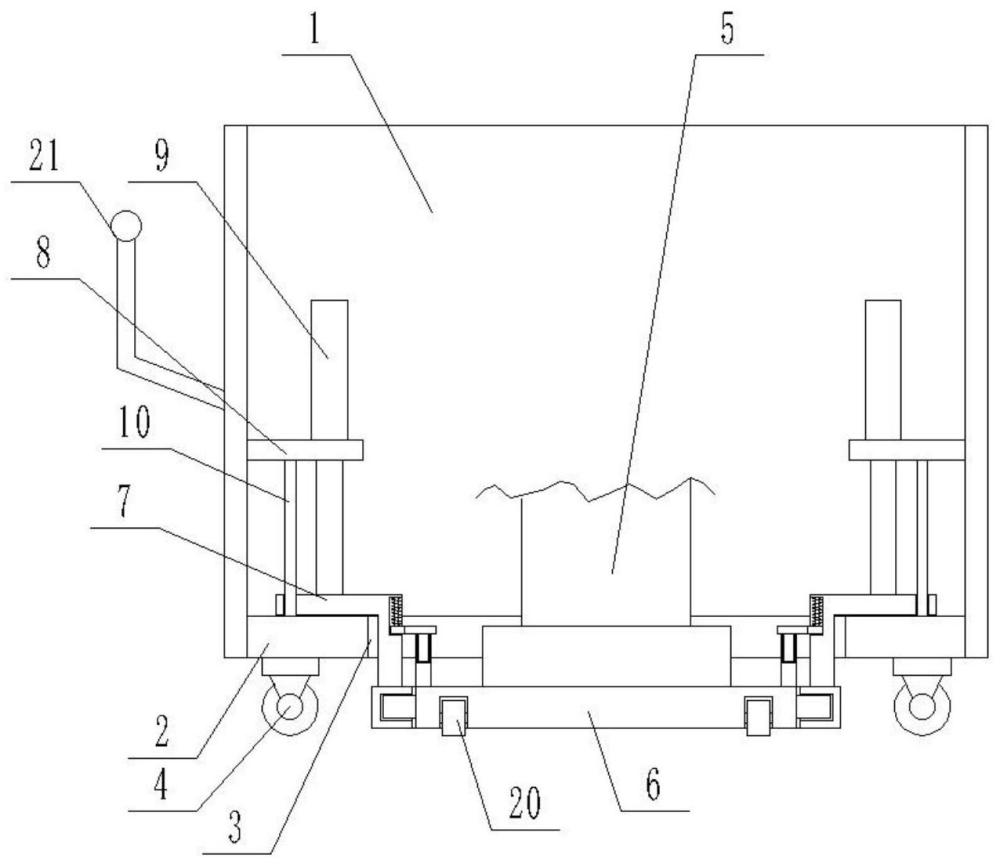
1、为了达到上述目的,本实用新型采用的技术方案为,本实用新型提供一种用于搬运机器人的搬运装置,包括外罩以及底板,所述外罩固定在所述底板一侧,所述底板上设置有运输结构;
2、所述运输结构,包括:豁口、移动轮、机器人本体、底座、连接架、升降部以及对接部;
3、所述豁口开在所述底板表面,所述移动轮安装在所述底板底面四角处,所述机器人本体固定在所述底座上,所述升降部设置在所述连接架与所述外罩以及所述底板上,所述对接部设置在所述连接架与所述底座上。
4、更进一步的,所述升降部,包括:内架、液压缸、圆杆以及滑孔;
5、所述内架固定在所述外罩内壁,所述液压缸固定在所述内架上且输出端与所述连接架相连接,所述圆杆固定在所述内架与所述底板之间,所述滑孔开在所述连接架内且滑动套装连接在所述圆杆上。
6、更进一步的,所述对接部,包括:外框架、插槽、插板、长槽、导向杆、对接套管、锁紧架以及弹簧;
7、所述外框架固定在所述连接架下端,所述插槽开在所述外框架内相对两端面,所述插板固定在所述底座相对两端面且插装连接在所述插槽内,所述长槽开在所述连接架侧端面,所述导向杆固定在所述长槽内,所述对接套管固定在所述底座表面,所述锁紧架活动套装连接在所述导向杆上且下端插装连接在所述对接套管内,所述弹簧套装连接在所述导向杆上。
8、优选的,所述外框架与所述外罩整体均为门形结构。
9、更进一步的,所述底座底部安装有定向轮。
10、更进一步的,所述外罩侧表面安装有推拉杆。
11、与现有技术相比,本实用新型的优点和积极效果在于,设置有预安装在机器人本体底部的底座,并带有定向轮可进行直线移动,能够插入连接到外框架内,并通过液压缸拉动抬起,进入到外罩内部,可随意进行移动,配合外罩,可将机器人设备保护在内部,装卸过程中不需要人力抬动,只需要在地面推动即可,安全性高,操作方式简单,实用性更强。
技术特征:
1.一种用于搬运机器人的搬运装置,包括外罩(1)以及底板(2),所述外罩(1)固定在所述底板(2)一侧,其特征在于,所述底板(2)上设置有运输结构;
2.根据权利要求1所述的一种用于搬运机器人的搬运装置,其特征在于,所述升降部,包括:内架(8)、液压缸(9)、圆杆(10)以及滑孔(11);
3.根据权利要求1所述的一种用于搬运机器人的搬运装置,其特征在于,所述对接部,包括:外框架(12)、插槽(13)、插板(14)、长槽(15)、导向杆(16)、对接套管(17)、锁紧架(18)以及弹簧(19);
4.根据权利要求3所述的一种用于搬运机器人的搬运装置,其特征在于,所述外框架(12)与所述外罩(1)整体均为门形结构。
5.根据权利要求1所述的一种用于搬运机器人的搬运装置,其特征在于,所述底座(6)底部安装有定向轮(20)。
6.根据权利要求1所述的一种用于搬运机器人的搬运装置,其特征在于,所述外罩(1)侧表面安装有推拉杆(21)。
技术总结
本技术公开了一种用于搬运机器人的搬运装置,包括外罩以及底板,所述外罩固定在所述底板一侧,所述底板上设置有运输结构,所述运输结构,包括:豁口、移动轮、机器人本体、底座、连接架、升降部以及对接部,所述豁口开在所述底板表面,所述移动轮安装在所述底板底面四角处,所述机器人本体固定在所述底座上。本技术设置有预安装在机器人本体底部的底座,并带有定向轮可进行直线移动,能够插入连接到外框架内,并通过液压缸拉动抬起,进入到外罩内部,可随意进行移动,配合外罩,可将机器人设备保护在内部,装卸过程中不需要人力抬动,只需要在地面推动即可,安全性高,操作方式简单,实用性更强。
技术研发人员:潘朝辉,薄艳梅
受保护的技术使用者:西安六麦机器人科技有限公司
技术研发日:20230706
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!