自主移动机器人的制作方法
本申请涉及搬运设备领域,更具体地说,涉及一种自主移动机器人。
背景技术:
1、自主移动机器人(arm),是一种通过搭载传感器和处理器来实现自动移动物料而无需物理导向器或标记的移动平台。侧重体现机器人的自主性和灵活性,即能对环境中各种动态变化做出自己的合理反应。
2、目前市面上amr种类繁多,多应用于快递行业或者拥有良好地面的生产装配车间,在地面环境较差的车间应用较少。主要原因是因其车轮结构限制,对地面平整度要求较高。目前市面上多数将两驱动轮组固定到车体上,再配备2-4个万向轮辅助承载。实际使用时,由于三点即能确定一个平面,两个驱动轮已作为两固定点,其余万向轮作用于平整度差的地面时,由于三点或者多点着地,容易造成驱动轮悬空状态,导致无法正常行驶。
3、因此,如何避免arm在平整度差的地面无法正常行驶成为本申请需要解决的技术问题。
技术实现思路
1、有鉴于此,本申请提出了一种自主移动机器人,以克服上述技术问题。
2、根据本申请,提出了一种自主移动机器人,包括底座、安装于所述底座的至少两个驱动机构以及多个从动轮,至少两个所述驱动机构包括能够被独立驱动的驱动轮,其中,所述驱动轮以及所述从动轮沿竖直方向可浮动地安装于所述底座。
3、优选地,包括设置于所述底座相对的侧壁的包括所述驱动机构的驱动轮组件,所述驱动轮组件包括与所述侧壁铰接于第一铰点并能够沿所述侧壁摆动的第一摆臂,所述驱动机构安装于所述第一摆臂的一端,所述从动轮包括安装于所述第一摆臂的另一端的第一从动轮,所述驱动轮组件还包括用以将所述第一摆臂复位至使所述驱动轮的底部与第一从动轮的底部所确定的平面与所述底座的底面平行的第一复位机构。
4、优选地,所述第一复位机构包括至少两个第一弹性件,所述第一弹性件的两端分别与所述第一摆臂和所述底座连接,其中,至少两个所述第一弹性件位于所述第一铰点的两侧。
5、优选地,所述底座包括位于所述第一铰点的上方并沿水平方向向外部延伸的第一安装板,所述第一弹性件通过第一调节件安装于所述第一安装板。
6、优选地,所述驱动轮位于所述自主移动机器人的中部,所述第一从动轮位于所述自主移动机器人的后部。
7、优选地,包括设置于所述自主移动机器人前部的从动轮组件,所述从动轮组件包括与所述底座的前壁铰接于第二铰点并沿所述前壁摆动的第二摆臂,其中,所述第二铰点位于所述前壁的中部,所述从动轮包括分别安装于所述第二摆臂两端的第二从动轮,所述从动轮组件还包括用以将所述第二摆臂复位至使两个所述第二从动轮的底部所确定的平面与所述底面平行的第二复位机构。
8、优选地,包括壳体,所述壳体具有平坦的承载面。
9、优选地,所述侧壁安装有用以制动所述驱动轮的开关,所述壳体开设有供所述开关嵌入的通孔,和/或,所述底座设置有灯组件,所述壳体开设有供所述灯组件嵌入的通孔。
10、优选地,所述底座的前后两侧分别安装有突出于所述自主移动机器人的触边件,所述触边件沿水平方向延伸并能够覆盖所述自主移动机器人的宽度。
11、优选地,所述底座的前后两侧分别安装有用以检测障碍物的雷达,和/或,所述从动轮包括万向轮。
12、根据本申请的技术方案,驱动轮和从动轮均能够沿竖直方向浮动,从而在行驶于平整度较差的地面时,能够自适应的使驱动轮和从动轮保持与底面接触,避免了由于驱动轮悬空导致无法正常行驶的问题。
13、本申请的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
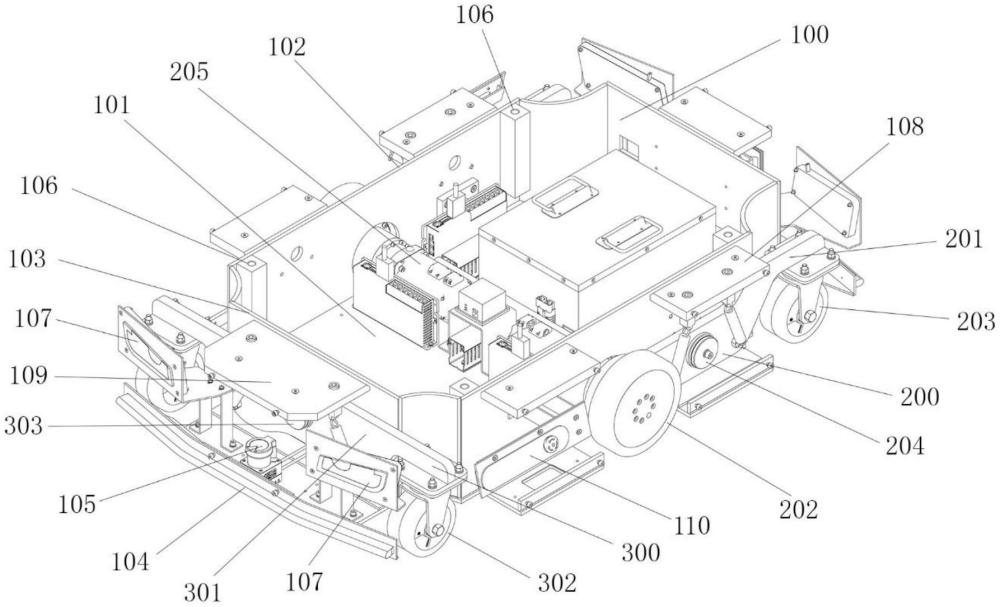
1.一种自主移动机器人,其特征在于,包括底座(100)、安装于所述底座(100)的至少两个驱动机构以及多个从动轮,至少两个所述驱动机构包括能够被独立驱动的驱动轮(202),其中,所述驱动轮(202)以及所述从动轮沿竖直方向可浮动地安装于所述底座(100)。
2.根据权利要求1所述的自主移动机器人,其特征在于,包括设置于所述底座(100)相对的侧壁(102)的包括所述驱动机构的驱动轮组件(200),所述驱动轮组件(200)包括与所述侧壁(102)铰接于第一铰点(204)并能够沿所述侧壁(102)摆动的第一摆臂(201),所述驱动机构安装于所述第一摆臂(201)的一端,所述从动轮包括安装于所述第一摆臂(201)的另一端的第一从动轮(203),所述驱动轮组件(200)还包括用以将所述第一摆臂(201)复位至使所述驱动轮(202)的底部与第一从动轮(203)的底部所确定的平面与所述底座(100)的底面(101)平行的第一复位机构。
3.根据权利要求2所述的自主移动机器人,其特征在于,所述第一复位机构包括至少两个第一弹性件(206),所述第一弹性件(206)的两端分别与所述第一摆臂(201)和所述底座(100)连接,其中,至少两个所述第一弹性件(206)位于所述第一铰点(204)的两侧。
4.根据权利要求3所述的自主移动机器人,其特征在于,所述底座(100)包括位于所述第一铰点(204)的上方并沿水平方向向外部延伸的第一安装板(108),所述第一弹性件(206)通过第一调节件(207)安装于所述第一安装板(108)。
5.根据权利要求2至4任一项所述的自主移动机器人,其特征在于,所述驱动轮(202)位于所述自主移动机器人的中部,所述第一从动轮(203)位于所述自主移动机器人的后部。
6.根据权利要求5所述的自主移动机器人,其特征在于,包括设置于所述自主移动机器人前部的从动轮组件(300),所述从动轮组件(300)包括与所述底座(100)的前壁(103)铰接于第二铰点(303)并沿所述前壁(103)摆动的第二摆臂(301),其中,所述第二铰点(303)位于所述前壁(103)的中部,所述从动轮包括分别安装于所述第二摆臂(301)两端的第二从动轮(302),所述从动轮组件(300)还包括用以将所述第二摆臂(301)复位至使两个所述第二从动轮(302)的底部所确定的平面与所述底面(101)平行的第二复位机构。
7.根据权利要求2所述的自主移动机器人,其特征在于,包括壳体(400),所述壳体(400)具有平坦的承载面(401)。
8.根据权利要求7所述的自主移动机器人,其特征在于,所述侧壁(102)安装有用以制动所述驱动轮(202)的开关(110),所述壳体(400)开设有供所述开关(110)嵌入的通孔,和/或,所述底座(100)设置有灯组件(107),所述壳体(400)开设有供所述灯组件(107)嵌入的通孔。
9.根据权利要求1所述的自主移动机器人,其特征在于,所述底座(100)的前后两侧分别安装有突出于所述自主移动机器人的触边件(104),所述触边件(104)沿水平方向延伸并能够覆盖所述自主移动机器人的宽度。
10.根据权利要求1所述的自主移动机器人,其特征在于,所述底座(100)的前后两侧分别安装有用以检测障碍物的雷达(105),和/或,所述从动轮包括万向轮。
技术总结
本申请公开了一种自主移动机器人,包括底座、安装于所述底座的至少两个驱动机构以及多个从动轮,至少两个所述驱动机构包括能够被独立驱动的驱动轮,其中,所述驱动轮以及所述从动轮沿竖直方向可浮动地安装于所述底座。根据本申请的技术方案,驱动轮和从动轮均能够沿竖直方向浮动,从而在行驶于平整度较差的地面时,能够自适应的使驱动轮和从动轮保持与底面接触,避免了由于驱动轮悬空导致无法正常行驶的问题。
技术研发人员:周云涛,李守兴,耿玉庆
受保护的技术使用者:济南科德智能科技有限公司
技术研发日:20230829
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!