用于转向系统的万向节补偿方法、相应的补偿系统及转向系统与流程
本申请涉及转向技术,更为具体地,涉及用于转向系统的万向节补偿的技术。
背景技术:
1、转向柱将车辆的方向盘与转向器连接起来,构成车辆的转向系统。简单地讲,除了作为重要构成部分的万向节,转向柱还包括将方向盘连接到万向节的方向盘输出轴以及将万向节连接到转向器的转向器输入轴。
2、由于万向节具有不等速特性,方向盘输出轴和转向器输入轴之间的传动比是可变的。如果不对万向节进行补偿,而是让转向器的输入扭矩恒定,则万向节的不等速特性会导致反馈到方向盘上的力存在周期性的波动,驾驶员手感体验较差。因此,需要进行补偿以抵消万向节的不等速特性导致的方向盘上的波动。
3、常规的做法是在转向器的控制器中固化补偿参数,据其计算补偿扭矩。控制器进一步使转向器的电机产生与所计算补偿扭矩大小相当但与转向扭矩方向相反的扭矩,以期消除波动。
4、但是,由于传动比与转向柱的加速度、方向盘输出轴的角度有关、以及方向盘输出轴和转向器输入轴之间的夹角有关,其中,方向盘输出轴和转向器输入轴之间的夹角其实是可变的,例如用户根据其需要对转向柱做了调整便可导致该夹角发生变化。这种情况下,常规的补偿计算就无法满足需要。因此,有必要提出改善的补偿方法。
技术实现思路
1、本申请提供用于转向系统的万向节补偿方法、补偿系统和转向系统,可解决上文提出的至少一个问题。
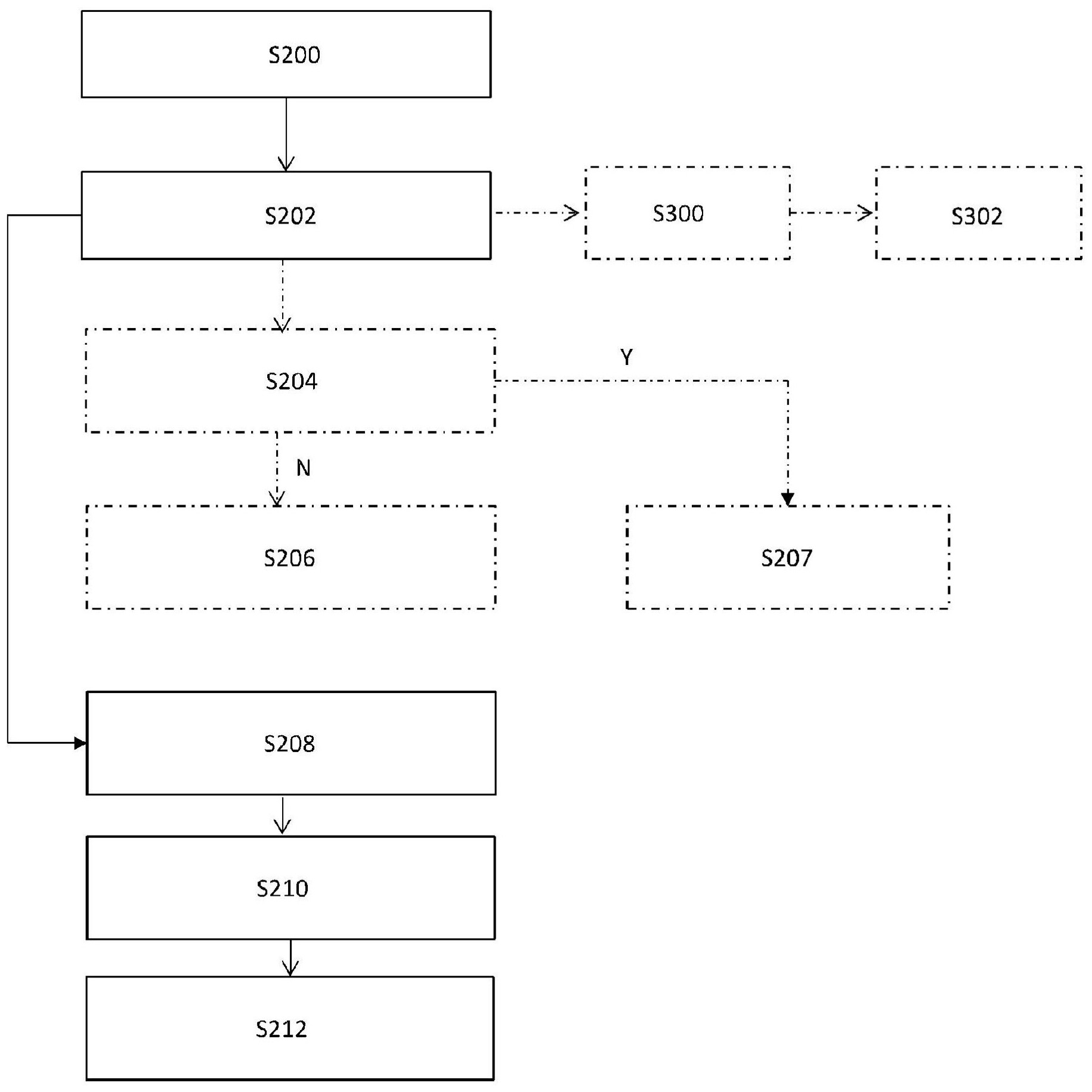
2、根据本申请的一个方面,提供用于转向系统的万向节补偿方法,该方法包括:在车辆行驶过程中,实时感测转向输入端的波动,产生表示所述波动的波动信息;由自学习模块从所述波动信息中提取波动特征参数 ,基于所提取的波动特征参数确定补偿参数,以及基于所确定的补偿参数计算补偿扭矩;并使所述转向系统实现所述补偿扭矩。
3、根据本申请的用于转向系统的万向节补偿方法,可选地,所述方法还包括基于所述波动特征参数,监测所述转向系统的万向节的工作状态。根据本申请的用于转向系统的万向节补偿方法,可选地,所述方法还包括在所述万向节的工作状态异常时发出警示。
4、根据本申请的用于转向系统的万向节补偿方法,可选地,所述由自学习模块基于所提取的波动特征参数确定补偿参数,包括:由所述自学习模块根据所提取的波动特征参数,从数据集中搜索匹配波动特征参数,所述匹配波动特征参数是所述数据集中与所提取的波动特征参数匹配的历史波动特征参数;在搜索到所述匹配波动特征参数的情况下,以所述匹配波动特征参数对应的补偿参数作为所确定的补偿参数;以及在未搜索到匹配波动特征参数的情况下,计算所述补偿参数;其中,所述数据集至少包括历史波动特征参数以及与每一个所述历史波动特征参数对应的补偿参数。按照本申请的示例,所述历史波动特征参数是由所述自学习模块在所述车辆以前的行驶过程中所提取的波动特征参数,而与所述历史波动特征参数对应的补偿参数是由所述自学习模块基于所述历史波动参数确定的补偿参数。
5、根据本申请的用于转向系统的万向节补偿方法,可选地,所述数据集还包括与每一个所述历史波动特征参数对应的位置参数,所述位置参数与所述转向系统有关。
6、根据本申请的用于转向系统的万向节补偿方法,可选地,所述方法进一步包括:由所述自学习模块对所实现的补偿扭矩进行评估,且以评估达到预设条件的所述补偿扭矩对应的所述补偿参数作为系统补偿参数。
7、根据本申请的另一方面,提供用于转向系统的万向节补偿系统,所述系统包括:传感器,其设置于所述转向系统的转向输入端,用于实时感测所述转向输入端的波动,产生表示所述波动的波动信息;自学习模块,用于从所述波动信息中提取波动特征参数,基于所提取的波动特征参数确定补偿参数,以及基于所确定的补偿参数计算补偿扭矩;以及控制模块,用于由所述转向系统实现所计算的补偿扭矩。
8、根据本申请的用于转向系统的万向节补偿系统,可选地,所述系统还包括监测模块,用于根据所述波动特征参数,监测所述万向节的工作状态。可选地,所述监测模块还设置成在所述万向节的工作状态出现异常时,发出警示。
9、根据本申请的用于转向系统的万向节补偿系统,可选地,所述自学习模块进一步用于通过如下过程来基于所提取的波动特征参数确定补偿参数:由所述自学习模块根据所提取的波动特征参数,从数据集中搜索匹配波动特征参数,所述匹配波动特征参数是所述数据集中与所提取的波动特征参数匹配的历史波动特征参数;在搜索到所述匹配波动特征参数的情况下,以所述匹配波动特征参数对应的补偿参数作为所确定的补偿参数;以及在未搜索到匹配波动特征参数的情况下,计算所述补偿参数;其中,所述数据集至少包括历史波动特征参数以及与每一个所述历史波动特征参数对应的补偿参数。作为示例,所述历史波动特征参数是由所述自学习模块在所述车辆以前的行驶过程中所提取的波动特征参数,而与所述历史波动特征参数对应的补偿参数是由所述自学习模块基于所述历史波动参数确定的补偿参数。
10、根据本申请的用于转向系统的万向节补偿系统,可选地,所述数据集还包括与每一个所述历史波动特征参数对应的位置参数,所述位置参数与所述转向系统有关。
11、根据本申请的用于转向系统的万向节补偿系统,可选地,所述自学习模块还被用于:对所实现的补偿扭矩进行评估,且以评估达到预设条件的所述补偿扭矩对应的所述补偿参数作为系统补偿参数。
12、根据本申请的再一方面,还提供转向系统,所述转向系统包括转向机构和控制器,所述转向系统还包括:传感器,设置在所述转向机构的转向输入端处,以实时感测转向输入端的波动,产生表示所述波动的波动信息;以及存储器,存储由程序指令实现的自学习模块且与所述控制器连接。所述控制器被设置为执行所述指令,并在执行所述指令时使得所述自学习模块从所述波动信息中提取波动特征参数,基于所提取的波动特征参数确定补偿参数,并且基于所确定的补偿参数计算补偿扭矩;以及使所述转向系统实现所述补偿扭矩。
13、根据本申请所述的转向系统,可选地,所述控制器进一步被设置为执行所述指令时,实现如上所述的用于转向系统的万向节补偿方法中的任意一种。
14、执行根据本申请描述的用于转向系统的万向节补偿方法,或采用根据本申请描述的用于转向系统的万向节补偿系统或转向系统,可根据车辆转向系统中的转向输入端的实时波动情况,确定补偿参数,从而提供更符合车辆实际情况的补偿扭矩,以在不同情况下都可有效抵消波动,提供更好的驾驶感受。
技术特征:
1.一种用于转向系统的万向节补偿方法,其特征在于,所述方法包括:
2.根据权利要求1所述的用于转向系统的万向节补偿方法,其特征在于,所述方法还包括基于所述波动特征参数,监测所述转向系统的所述万向节的工作状态。
3.根据权利要求2所述的用于转向系统的万向节补偿方法,其特征在于,所述方法还包括在所述万向节的所述工作状态异常时发出警示。
4.根据权利要求1所述的用于转向系统的万向节补偿方法,其特征在于,所述由自学习模块基于所提取的波动特征参数确定补偿参数,包括:
5.根据权利要求4所述的用于转向系统的万向节补偿方法,其特征在于,所述数据集还包括与每一个所述历史波动特征参数对应的位置参数,所述位置参数与所述转向系统有关。
6.根据权利要求1到5中任意一项所述的用于转向系统的万向节补偿方法,其特征在于,所述方法进一步包括:由所述自学习模块对所实现的补偿扭矩进行评估,且以评估达到预设条件的所述补偿扭矩对应的所述补偿参数作为系统补偿参数。
7.一种用于转向系统的万向节补偿系统,其特征在于,所述系统包括:
8.根据权利要求7所述的用于转向系统的万向节补偿系统,其特征在于,所述自学习模块进一步用于通过如下过程来基于所提取的波动特征参数确定补偿参数:
9.根据权利要求8所述的用于转向系统的万向节补偿系统,其特征在于,所述数据集还包括与每一个所述历史波动特征参数对应的位置参数,所述位置参数与所述转向系统有关。
10.根据权利要求7所述的用于转向系统的万向节补偿系统,其特征在于,所述系统还包括:监测模块,用于根据所述波动特征参数,监测所述转向系统的所述万向节的工作状态。
11.根据权利要求7到10中的任意一项所述的用于转向系统的万向节补偿系统,其特征在于,所述自学习模块还被用于对所实现的补偿扭矩进行评估,且以评估达到预设条件的所述补偿扭矩对应的所述补偿参数作为系统补偿参数。
12.一种转向系统,所述转向系统包括转向机构和控制器,其特征在于,所述转向系统还包括:
13.根据权利要求12所述的转向系统,其特征在于,所述控制器进一步被设置为执行所述指令时,实现根据权利要求2到6中任意一项所述的用于转向系统的万向节补偿方法。
技术总结
本申请提供用于转向系统的万向节补偿方法、相应的补偿系统及转向系统。根据本申请的用于转向系统的万向节补偿方法,包括在车辆行驶过程中,实时感测转向输入端的波动,产生表示所述波动的波动信息;由自学习模块从所述波动信息中提取波动特征参数、基于所提取的波动特征参数确定补偿参数以及基于所确定的补偿参数计算补偿扭矩;并通过转向系统实现所述补偿扭矩。本申请提供的方法及系统可根据实时感测的波动来对万向节补偿参数进行调整。
技术研发人员:王光芒,张学俭
受保护的技术使用者:博世汽车转向系统(济南)有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!