车辆后倾角的调整方法、系统、电子设备及存储介质与流程
本发明涉及车辆,特别涉及一种车辆后倾角的调整方法、系统、电子设备及存储介质。
背景技术:
1、车辆的后倾角对于车辆的高速直行稳定性有较大影响,如果车辆的左右后倾角的对称性差,那么,车辆在高速行驶时就会受到侧向力的扰动,导致车辆将会发生明显的跑偏问题,影响行车安全。因此,需要对车辆的后倾角进行调整,提高左右后倾角的对称性。然而,在后倾角调整的过程中,由于无法在四轮定位设备上实时显示调整后的后倾角数据,因此,工人在调整后倾角时无法知晓后倾角是否已调节到位,导致难以保证左右后倾角的对称性。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种车辆后倾角的调整方法、系统、电子设备及存储介质,能够实时检测车辆的后倾角,保证车辆的左右后倾角的对称性好,从而提高车辆的高速直行稳定性。
2、本发明第一方面实施例提供了一种车辆后倾角的调整方法,其包括如下的步骤:
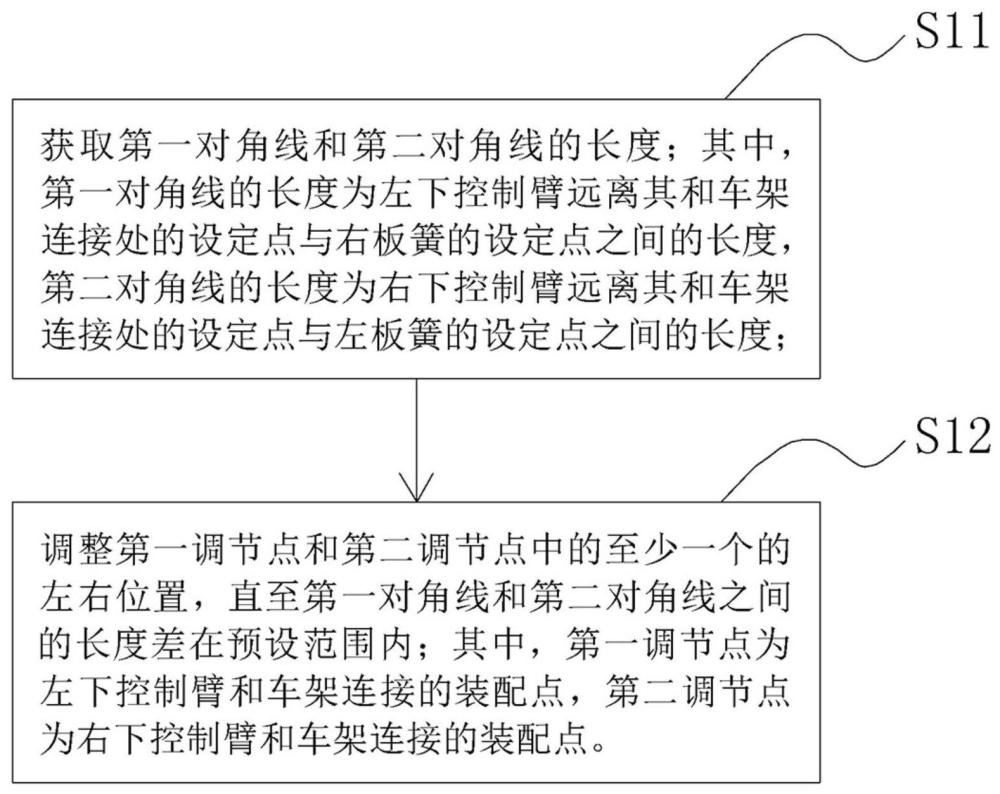
3、获取第一对角线和第二对角线的长度;其中,所述第一对角线的长度为左下控制臂远离其和车架连接处的设定点与右板簧的设定点之间的长度,所述第二对角线的长度为右下控制臂远离其和车架连接处的设定点与左板簧的设定点之间的长度;
4、调整第一调节点和第二调节点中的至少一个的左右位置,直至所述第一对角线和所述第二对角线之间的长度差在预设范围内;其中,所述第一调节点为左下控制臂和车架连接的装配点,所述第二调节点为右下控制臂和车架连接的装配点。
5、根据本发明第一方面实施例的车辆后倾角的调整方法,至少具有如下的有益效果:对于车辆的底盘结构而言,左板簧和右板簧在装配后的设定点位置和左右间距是确定不变的,因此,可以通过沿车辆的左右方向调整左下控制臂和车架连接的装配点,和/或右下控制臂和车架连接的装配点,驱使左下控制臂远离其和车架连接处的设定点,和/或右下控制臂远离其和车架连接处的设定点沿车辆的前后方向移动,从而控制左下控制臂远离其和车架连接处的设定点与右板簧的设定点之间的长度大小,和/或右下控制臂远离其和车架连接处的设定点与左板簧的设定点之间的长度大小,根据三角形全等原理,当调整至第一对角线的长度和第二对角线的长度相等时,那么,可以确定左下控制臂远离其和车架连接处的设定点与右下控制臂远离其和车架连接处的设定点调整到位,促使车辆的左右后倾角具有好的对称性。
6、本发明通过直观测量第一对角线和第二对角线的长度数据来确认车辆的左右后倾角的对称性,保证车辆具有好的左右后倾角的对称性,从而提高车辆的高速直行稳定性。
7、在本发明的一些实施例中,所述第一对角线为左下控制臂的球头与右板簧的u形螺栓端头之间的连线,所述第二对角线为右下控制臂的球头与左板簧的u形螺栓端头之间的连线。
8、在本发明的一些实施例中,所述左下控制臂具有与车架连接的第一前装配点和第一后装配点,所述第一后装配点为所述第一调节点;所述右下控制臂具有与车架连接的第二前装配点和第二后装配点,所述第二后装配点为所述第二调节点。
9、在本发明的一些实施例中,所述调整第一调节点和第二调节点中的至少一个的左右位置,具体包括如下的步骤:顺时针或逆时针旋转所述第一后装配点上的偏心垫片,以调整所述第一后装配点相对车架的左右位置;和/或,顺时针或逆时针旋转所述第二后装配点上的偏心垫片,以调整所述第二后装配点相对车架的左右位置。
10、在本发明的一些实施例中,所述获取第一对角线和第二对角线的长度,具体包括如下的步骤:
11、对车辆拍摄,并获取图像数据;其中,所述图像数据包括左下控制臂远离其和车架连接处的设定点、右板簧的设定点、右下控制臂远离其和车架连接处的设定点以及左板簧的设定点;
12、计算左下控制臂远离其和车架连接处的设定点与右板簧的设定点之间的距离,以获得所述第一对角线的长度;并计算右下控制臂远离其和车架连接处的设定点与左板簧的设定点之间的距离,以获得所述第二对角线的长度。
13、在本发明的一些实施例中,所述调整第一调节点和第二调节点中的至少一个的左右位置,直至所述第一对角线和所述第二对角线之间的长度差在预设范围内,具体包括如下的步骤:
14、调整第一调节点的左右位置和/或第二调节点的左右位置;
15、获取调整后的所述第一对角线和所述第二对角线的长度;
16、计算调整后的所述第一对角线和所述第二对角线之间的长度差;
17、判断所述长度差是否在预设范围,若否,则返回调整第一调节点的左右位置和/或第二调节点的左右位置的步骤。
18、在本发明的一些实施例中,在所述获取第一对角线和第二对角线的长度之前,还包括如下的步骤:
19、根据车辆初始状态的长宽尺寸数据,计算所述第一对角线和所述第二对角线的理论长度数据;
20、在所述调整第一调节点和第二调节点中的至少一个的左右位置之前,还包括如下的步骤:
21、计算所述第一对角线的实测长度数据与其理论长度数据之差值,以及所述第二对角线的实测长度数据与其理论长度数据之差值;
22、根据两个差值的比较结果,确定调整第一调节点或第二调节点。
23、本发明第二方面实施例提供一种车辆后倾角的调整系统,使用如第一方面实施例的车辆后倾角的调整方法,其包括:
24、获取单元,用于获取第一对角线和第二对角线的长度;其中,所述第一对角线的长度为左下控制臂远离其和车架连接处的设定点与右板簧的设定点之间的长度,所述第二对角线的长度为右下控制臂远离其和车架连接处的设定点与左板簧的设定点之间的长度;
25、调整单元,用于调整第一调节点和第二调节点中的至少一个的左右位置,直至所述第一对角线和所述第二对角线之间的长度差在预设范围内;其中,所述第一调节点为左下控制臂和车架连接的装配点,所述第二调节点为右下控制臂和车架连接的装配点。
26、本发明第三方面实施例提供一种电子设备,其包括:
27、至少一个处理器;以及
28、与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行如第一方面实施例的车辆后倾角的调整方法。
29、本发明第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面实施例的车辆后倾角的调整方法。
30、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种车辆后倾角的调整方法,其特征在于,包括如下的步骤:
2.根据权利要求1所述的车辆后倾角的调整方法,其特征在于,所述第一对角线为左下控制臂的球头与右板簧的u形螺栓端头之间的连线,所述第二对角线为右下控制臂的球头与左板簧的u形螺栓端头之间的连线。
3.根据权利要求1所述的车辆后倾角的调整方法,其特征在于,所述左下控制臂具有与车架连接的第一前装配点和第一后装配点,所述第一后装配点为所述第一调节点;所述右下控制臂具有与车架连接的第二前装配点和第二后装配点,所述第二后装配点为所述第二调节点。
4.根据权利要求3所述的车辆后倾角的调整方法,其特征在于,所述调整第一调节点和第二调节点中的至少一个的左右位置,具体包括如下的步骤:顺时针或逆时针旋转所述第一后装配点上的偏心垫片,以调整所述第一后装配点相对车架的左右位置;和/或,顺时针或逆时针旋转所述第二后装配点上的偏心垫片,以调整所述第二后装配点相对车架的左右位置。
5.根据权利要求1所述的车辆后倾角的调整方法,其特征在于,所述获取第一对角线和第二对角线的长度,具体包括如下的步骤:
6.根据权利要求1所述的车辆后倾角的调整方法,其特征在于,所述调整第一调节点和第二调节点中的至少一个的左右位置,直至所述第一对角线和所述第二对角线之间的长度差在预设范围内,具体包括如下的步骤:
7.根据权利要求1至6任一所述的车辆后倾角的调整方法,其特征在于,在所述获取第一对角线和第二对角线的长度之前,还包括如下的步骤:
8.一种车辆后倾角的调整系统,使用如权利要求1至7任一所述的车辆后倾角的调整方法,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1至7任一所述的车辆后倾角的调整方法。
技术总结
本发明公开了车辆后倾角的调整方法、系统、电子设备及存储介质,涉及车辆技术领域;车辆后倾角的调整方法包括如下步骤:获取第一对角线和第二对角线的长度;其中,第一对角线的长度为左下控制臂远离其和车架连接处的设定点与右板簧的设定点之间的长度,第二对角线的长度为右下控制臂远离其和车架连接处的设定点与左板簧的设定点之间的长度;调整第一调节点和第二调节点中的至少一个的左右位置,直至第一对角线和第二对角线之间的长度差在预设范围内;其中,第一调节点为左下控制臂和车架连接的装配点,第二调节点为右下控制臂和车架连接的装配点。本发明能实时检测车辆后倾角,保证车辆的左右后倾角对称性好,从而提高车辆的高速直行稳定性。
技术研发人员:刘冬青,王兴平,张冲,鲁慧,王明,刘德丰
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!