一种能够行走、翻滚的多模态四足机器人
本申请涉及智能机器人,特别涉及一种能够行走、翻滚的多模态四足机器人。
背景技术:
1、由于四足机器人优秀的地形适应性和机动性,其在军事、救援、探索、工业等领域具有非常大的应用潜力。近年来,研究者们针对四足机器人的步态控制算法愈发成熟,四足机器人在各个行业的应用实践也越来越多。然而,受限于当下电机技术和电池技术的发展,在更加复杂的实际作业场景,尤其是在野外地形起伏大、缺乏充电条件的场景中,如何进一步提高四足机器人的机动性和续航能力仍然是亟待解决的问题。
2、对此,我们提出了一种能够行走、翻滚的多模态四足机器人来解决上述问题。
技术实现思路
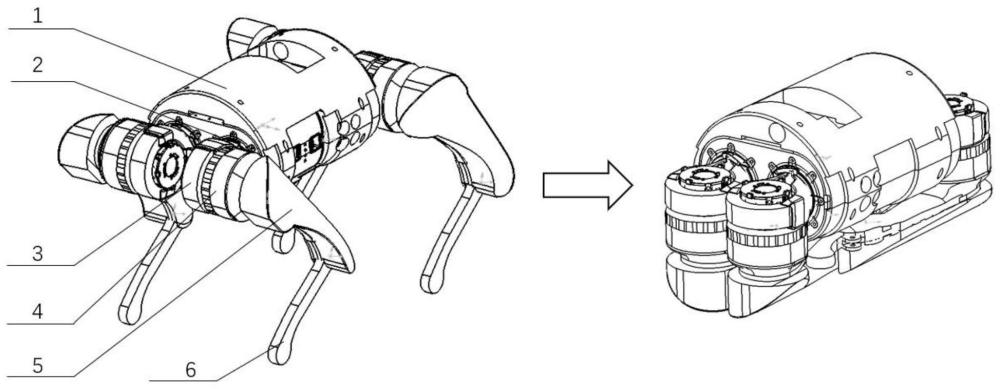
1、本申请目的在于实现机器人在平地和下坡地形中以翻滚代替行走,降低能耗,相比现有技术提供一种能够行走、翻滚的多模态四足机器人,包括壳体及其内部的控制电路,壳体呈类圆柱结构,壳体前后两端均安装有多个行走机构,多个行走机构在收合状态下与壳体组成类圆柱面,壳体外壁开设有与行走机构位置对应的预留槽,行走机构包括固定安装于壳体上的臀关节电机,臀关节电机输出端连接有大腿关节电机,大腿关节电机输出端连接有小腿关节电机,小腿关节电机输出端连接有大腿,大腿远离大腿关节电机一端转动连接有小腿,利用臀关节电机配合大腿关节电机以及小腿关节电机可以控制大腿和小腿行走,同时可以控制行走机构折叠并收纳至预留槽中,配合类圆柱结构的壳体形成可以翻滚前进的结构,使得该机器人可以在平地和下坡地形中以极低的能耗用翻滚代替行走,有效降低了机器人的能耗,延长了其工作时长。
2、进一步的,大腿内部安装有与小腿关节电机输出端固定连接的第一齿轮,第一齿轮啮合连接有第二齿轮,第二齿轮转动连接有连杆,连杆远离第二齿轮一端通过转动轴一转动连接于小腿上端,小腿通过转动轴二转动连接于大腿末端。
3、进一步的,壳体外壁涂布有耐磨层,耐磨层可以提高壳体的使用寿命,降低使用成本。
4、相比于现有技术,本申请的优点在于:
5、这种具有多运动模态的四足机器人,由于可以在平地和下坡地形中以极低的能耗用翻滚代替行走,相比于传统的四足机器人,具有低功耗、长续航、低成本、高机动性、运动稳定性好等特点,能够解决传统四足机器人在能源、续航上的问题。
技术特征:
1.一种能够行走、翻滚的多模态四足机器人,包括壳体(1)及其内部的控制电路,其特征在于,所述壳体(1)呈类圆柱结构,所述壳体(1)前后两端均安装有多个行走机构,所述壳体(1)外壁开设有与行走机构位置对应的预留槽(7),多个所述行走机构在收合状态下与壳体(1)组成类圆柱面;
2.根据权利要求1所述的一种能够行走、翻滚的多模态四足机器人,其特征在于,所述大腿(5)内部安装有与小腿关节电机(4)输出端固定连接的第一齿轮(8),所述第一齿轮(8)啮合连接有第二齿轮(9),所述第二齿轮(9)转动连接有连杆(10),所述连杆(10)远离第二齿轮(9)一端通过转动轴一(11)转动连接于小腿(6)上端,所述小腿(6)通过转动轴二(12)转动连接于大腿(5)末端。
3.根据权利要求1所述的一种能够行走、翻滚的多模态四足机器人,其特征在于,所述壳体(1)外壁涂布有耐磨层。
技术总结
本发明提供了应用于智能机器人技术领域的一种能够行走、翻滚的多模态四足机器人,包括壳体及其内部的控制电路,壳体呈类圆柱结构,壳体前后两端均安装有多个行走机构,多个行走机构在收合状态下与壳体组成类圆柱面,壳体外壁开设有与行走机构位置对应的预留槽,行走机构包括固定安装于壳体上的臀关节电机,臀关节电机输出端连接有大腿关节电机,利用臀关节电机配合大腿关节电机以及小腿关节电机可以控制大腿和小腿行走,同时可以控制行走机构折叠并收纳至预留槽中,配合类圆柱结构的壳体形成可以翻滚前进的结构,使得该机器人可以在平地和下坡地形中以极低的能耗用翻滚代替行走,有效降低了机器人的能耗,延长了其工作时长。
技术研发人员:孙帅帅,蔡浩锐
受保护的技术使用者:中国科学技术大学
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!