具有减振功能的并联机器人及足式机器人
本申请涉及机器人,具体而言,涉及一种具有减振功能的并联机器人及足式机器人。
背景技术:
1、相比于轮式和履带式机器人,足式机器人在复杂环境中具有较强的环境适应性,能够在地震等灾后现场、建筑失火现场以及未知星球表面等危险场合进行监测、搜救及探索等任务。但现有的足式机器人的足部存在以下问题:自由度少,活动角度范围小,灵活性差,不具备自复位性能,整体结构复杂,不够稳定。
技术实现思路
1、本申请提供一种具有减振功能的并联机器人及足式机器人,以改善上述问题。
2、本发明具体是这样的:
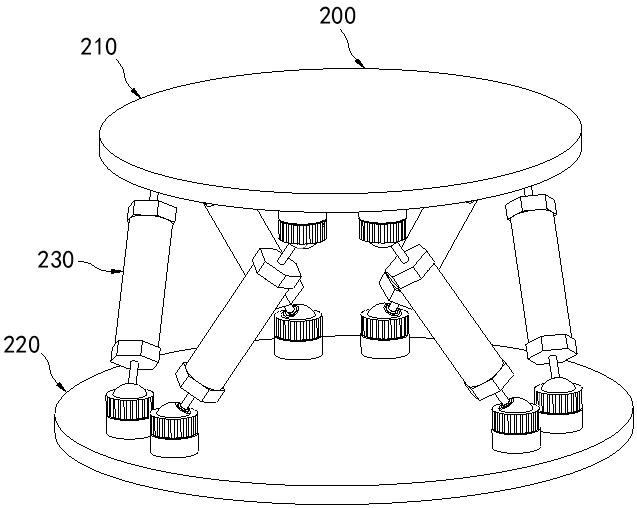
3、一种具有减振功能的并联机器人,包括第一平台、第二平台及多个减振组件;
4、第一平台与第二平台平行且间隔的设置;
5、多个减振组件均绕第一平台或第二平台的轴线方向布置,每个减振组件均包括减振单元以及两个球铰单元,两个球铰单元分别连接于减振单元的两端,且两个球铰单元分别与第一平台及第二平台连接;
6、其中,任意两个相邻的减振单元均呈夹角设置。
7、在本发明的一种实施例中,球铰单元包括球铰座、球头以及球铰盖;
8、球铰座与第一平台或第二平台连接;
9、球铰座配置有第一球形腔,球铰盖配置有第二球形腔,球铰盖与球铰座可拆卸地连接,且第一球形腔与第二球形腔共同形成容置部,球头可转动地容置于容置部内;
10、球铰盖开设有与第二球形腔连通的第一通孔,第一通孔的直径小于球头的直径。
11、在本发明的一种实施例中,球铰座配置有第一外螺纹,球铰盖配置有与第一外螺纹螺纹连接的第一内螺纹;第一球形腔或第二球形腔的表面配置有两道弧形润滑槽,沿球铰座的轴线方向,两道弧形润滑槽的投影相互垂直。
12、在本发明的一种实施例中,球铰座的外周面设置有与第一外螺纹间隔的外台阶,球铰盖的内周面设置有与第一内螺纹间隔的内台阶;
13、沿球铰座的轴线方向,外台阶与球铰盖的端面间隔形成外间隙,内台阶与球铰座的端面间隔形成内间隙。
14、在本发明的一种实施例中,减振单元包括套筒、减振弹簧、两个连接头以及两个减振压杆;
15、减振弹簧沿套筒的轴线布置于套筒内,两个连接头分别可拆卸地连接于套筒的两端;
16、两个减振压杆分别位于套筒的两端,且减振压杆的部分位于套筒内,并与减振弹簧及连接头抵持,其余部分由连接头伸出,并与球头连接。
17、在本发明的一种实施例中,减振压杆包括球形部以及杆体部,杆体部与球形部连接,连接头正对于套筒的部分设置有与球形部配合的第三球形腔;连接头开设有与第三球形腔连通的第二通孔,第二通孔供杆体部通过;
18、套筒的两端均配置有第二外螺纹,连接头配置有与第二外螺纹螺纹连接的第二内螺纹;减振压杆的外周配置有多个沿套筒的轴线方向延伸的外花键,套筒内部设置多个与外花键一一对应配合的内花键。
19、在本发明的一种实施例中,杆体部配置有第三外螺纹;
20、球头设置有球冠平面,球冠平面开设有第三内螺纹,且球冠平面处配置有球头螺帽,第三内螺纹与第三外螺纹连接;
21、其中,第一通孔将球冠平面敞开。
22、在本发明的一种实施例中,球头螺帽的中轴线和第三内螺纹的螺纹孔的中轴线均与球冠平面的中轴线重合;球头螺帽配置有螺帽弧面,螺帽弧面与球头的中心重合,且半径相同。
23、一种足式机器人,包括机器人足部以及至少一个上述的具有减振功能的并联机器人;第一平台或第二平台与机器人足部连接。
24、在本发明的一种实施例中,足式机器人还包括力传感器和防滑层;
25、第一平台与机器人足部连接,第一平台开设有安装力传感器的安装槽,力传感器为六维压力传感器;防滑层与第二平台背离第一平台的一侧连接,并用于与地面接触。
26、本发明的有益效果是:
27、该具有减振功能的并联机器人包括第一平台、第二平台及多个减振组件;第一平台与第二平台平行且间隔的设置;多个减振组件均绕第一平台或第二平台的轴线方向布置,每个减振组件均包括减振单元以及两个球铰单元,两个球铰单元分别连接于减振单元的两端,且两个球铰单元分别与第一平台及第二平台连接;其中,任意两个相邻的减振单元均呈夹角设置。该具有减振功能的并联机器人的多个减振组件呈并联结构,具有较大的承载能力,且能实现足式机器人的足端的摆角、减振和自复位功能,提高足式机器人的稳定性。
技术特征:
1.一种具有减振功能的并联机器人,其特征在于:
2.根据权利要求1所述的具有减振功能的并联机器人,其特征在于:
3.根据权利要求2所述的具有减振功能的并联机器人,其特征在于:
4.根据权利要求3所述的具有减振功能的并联机器人,其特征在于:
5.根据权利要求2所述的具有减振功能的并联机器人,其特征在于:
6.根据权利要求5所述的具有减振功能的并联机器人,其特征在于:
7.根据权利要求6所述的具有减振功能的并联机器人,其特征在于:
8.根据权利要求7所述的具有减振功能的并联机器人,其特征在于:
9.一种足式机器人,其特征在于:
10.根据权利要求9所述的足式机器人,其特征在于:
技术总结
本申请涉及机器人技术领域,具体而言,涉及一种具有减振功能的并联机器人及足式机器人。该具有减振功能的并联机器人包括第一平台、第二平台及多个减振组件;第一平台与第二平台平行且间隔的设置;多个减振组件均绕第一平台或第二平台的轴线方向布置,每个减振组件均包括减振单元以及两个球铰单元,两个球铰单元分别连接于减振单元的两端,且两个球铰单元分别与第一平台及第二平台连接;其中,任意两个相邻的减振单元均呈夹角设置。该具有减振功能的并联机器人的多个减振组件呈并联结构,具有较大的承载能力,且能实现足式机器人的足端的摆角、减振和自复位功能,提高足式机器人的稳定性。
技术研发人员:唐忠,魏灵,蒋刚,龚迪琛,易诗,郝兴安,邹海峰,李超,万江涛,张仁强
受保护的技术使用者:成都理工大学
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!