一种具有防滑结构的巡检机器人的制作方法
本技术涉及巡检机器人领域,特别涉及一种具有防滑结构的巡检机器人。
背景技术:
1、巡检机器人是一种自主移动的智能机器人,用于执行巡逻、监测和检查任务,通常应用于各种领域,如工业、安防和环境监测等。这种机器人配备有多种传感器和相机,能够实时获取环境信息,并通过自主导航系统规划路径,完成特定区域的巡检工作。
2、经检索,专利号为cn217168536u,公开了巡检机器人,克纳姆轮可以实现前行、横移、斜行、旋转及其组合等运动方式,使得巡检机器人移动更加灵活。且由于电池设置于轮毂内,有效减小对机架空间的占用,便于机架小型化,进一步便于巡检机器人在空间狭小的地方移动,然而现有的巡检机器人在使用时,其下侧的滚轮容易与地面发生相对滑动而影响巡检机器人的正常行进过程,也容易因打滑而与外界发生误撞,安全系数较低。
技术实现思路
1、本实用新型要解决的技术问题是提供一种具有防滑结构的巡检机器人,现有的巡检机器人在使用时,其下侧的滚轮容易与地面发生相对滑动而影响巡检机器人的正常行进过程,也容易因打滑而与外界发生误撞,安全系数较低。
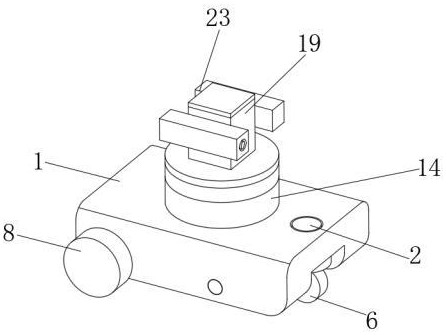
2、为了解决上述技术问题,本实用新型的技术方案为,一种具有防滑结构的巡检机器人,包括设置在主体上侧的承载台,还包括内锯齿带,所述内锯齿带的外侧面开设有若干组防滑槽,所述主体的底部靠近前侧中间位置设置有前滚轮,所述主体的两侧面靠近后侧均设置有后滚轮,两组所述后滚轮之间卡固连接有从动杆。
3、作为本实用新型的进一步方案:所述主体的上表面靠近前侧中间位置嵌设有第一电机,所述第一电机的输出端固定连接有第一转轴,所述第一转轴的下端卡接有第一转盘。
4、作为本实用新型的进一步方案:所述第一转盘的下表面靠近中间位置固定连接有两组架板,且前滚轮转动安装在两组架板之间。
5、作为本实用新型的进一步方案:所述从动杆的外侧面靠近中间位置固定套接有第一齿辊,所述主体的下表面靠近中间位置开设有凹槽,且凹槽的内部远离从动杆的一侧设置有辅助杆,所述辅助杆的外侧面靠近中间位置固定套接有第二齿辊。
6、作为本实用新型的进一步方案:所述从动杆和辅助杆均与主体转动连接,所述第一齿辊和第二齿辊均与内锯齿带相啮合,若干组所述防滑槽等间距分布在内锯齿带的外侧面。
7、作为本实用新型的进一步方案:所述承载台的上表面设置有第二转盘,所述第二转盘的下表面靠近边缘位置固定连接有限位环板,所述第二转盘的上表面中间位置卡固安装有顶槽壳,所述顶槽壳的上端安装有盖板,所述顶槽壳的两侧靠近顶部均设置有摄像头。
8、作为本实用新型的进一步方案:所述承载台的下表面中间位置嵌设有第二电机,所述第二电机的输出端固定连接有贯穿承载台的第二转轴,且第二转盘与第二转轴相卡接,所述承载台的外侧面开设有边槽,且限位环板位于边槽的内部。
9、作为本实用新型的进一步方案:所述顶槽壳的内部固定安装有双轴电机,所述双轴电机的两输出端均固定连接有第三转轴,且两组摄像头分别与两组第三转轴相卡接。
10、本实用新型采用上述技术方案,与现有技术相比,具有以下优点:通过启动主体上的第一电机,以带动第一转轴和第一转盘进行旋转,从而带动两组架板及前滚轮一同转动,使得巡检机器人在前进时得以转向,当巡检机器人前进时,会带动从动杆及其两端的后滚轮一同旋转,从而带动从动杆外侧的第一齿辊进行旋转,进而在辅助杆外侧第二齿辊的配合下带动内锯齿带进行转动,且内锯齿带的外表面开设有若干组防滑槽,能够避免巡检机器人在行进过程中与地面发生相对滑动,确保了巡检机器人的稳定移动,安全性较高。
11、通过启动顶槽壳内部的双轴电机,以带动两组第三转轴进行旋转,从而带动两组摄像头一同倾斜转动,同时启动承载台底部的的第二电机,以带动第二转轴进行旋转,从而在限位环板和边槽的配合下带动第二转盘在承载台的上表面进行旋转,适用于对外界不同位置处进行摄像检查,具有快捷的调节巡检功能。
技术特征:
1.一种具有防滑结构的巡检机器人,包括设置在主体(1)上侧的承载台(14),其特征在于:还包括内锯齿带(12),所述内锯齿带(12)的外侧面开设有若干组防滑槽(13),所述主体(1)的底部靠近前侧中间位置设置有前滚轮(6),所述主体(1)的两侧面靠近后侧均设置有后滚轮(8),两组所述后滚轮(8)之间卡固连接有从动杆(7)。
2.根据权利要求1所述的一种具有防滑结构的巡检机器人,其特征在于:所述主体(1)的上表面靠近前侧中间位置嵌设有第一电机(2),所述第一电机(2)的输出端固定连接有第一转轴(3),所述第一转轴(3)的下端卡接有第一转盘(4)。
3.根据权利要求2所述的一种具有防滑结构的巡检机器人,其特征在于:所述第一转盘(4)的下表面靠近中间位置固定连接有两组架板(5),且前滚轮(6)转动安装在两组架板(5)之间。
4.根据权利要求1所述的一种具有防滑结构的巡检机器人,其特征在于:所述从动杆(7)的外侧面靠近中间位置固定套接有第一齿辊(9),所述主体(1)的下表面靠近中间位置开设有凹槽,且凹槽的内部远离从动杆(7)的一侧设置有辅助杆(10),所述辅助杆(10)的外侧面靠近中间位置固定套接有第二齿辊(11)。
5.根据权利要求4所述的一种具有防滑结构的巡检机器人,其特征在于:所述从动杆(7)和辅助杆(10)均与主体(1)转动连接,所述第一齿辊(9)和第二齿辊(11)均与内锯齿带(12)相啮合,若干组所述防滑槽(13)等间距分布在内锯齿带(12)的外侧面。
6.根据权利要求1所述的一种具有防滑结构的巡检机器人,其特征在于:所述承载台(14)的上表面设置有第二转盘(17),所述第二转盘(17)的下表面靠近边缘位置固定连接有限位环板(18),所述第二转盘(17)的上表面中间位置卡固安装有顶槽壳(19),所述顶槽壳(19)的上端安装有盖板(20),所述顶槽壳(19)的两侧靠近顶部均设置有摄像头(23)。
7.根据权利要求6所述的一种具有防滑结构的巡检机器人,其特征在于:所述承载台(14)的下表面中间位置嵌设有第二电机(15),所述第二电机(15)的输出端固定连接有贯穿承载台(14)的第二转轴(16),且第二转盘(17)与第二转轴(16)相卡接,所述承载台(14)的外侧面开设有边槽,且限位环板(18)位于边槽的内部。
8.根据权利要求6所述的一种具有防滑结构的巡检机器人,其特征在于:所述顶槽壳(19)的内部固定安装有双轴电机(21),所述双轴电机(21)的两输出端均固定连接有第三转轴(22),且两组摄像头(23)分别与两组第三转轴(22)相卡接。
技术总结
本技术公开了一种具有防滑结构的巡检机器人,涉及巡检机器人领域,包括设置在主体上侧的承载台,还包括内锯齿带,内锯齿带的外侧面开设有若干组防滑槽,主体的底部靠近前侧中间位置设置有前滚轮,主体的两侧面靠近后侧均设置有后滚轮,两组后滚轮之间卡固连接有从动杆,主体的上表面靠近前侧中间位置嵌设有第一电机,第一电机的输出端固定连接有第一转轴,第一转轴的下端卡接有第一转盘,第一转盘的下表面靠近中间位置固定连接有两组架板;本技术的优点在于:能够避免巡检机器人在行进过程中与地面发生相对滑动,确保了巡检机器人的稳定移动,安全性较高,且适用于对外界不同位置处进行摄像检查,具有快捷的调节巡检功能。
技术研发人员:蒙洋,孙振江,韩雪,许靖爽
受保护的技术使用者:龙行智远(重庆)智能科技有限公司
技术研发日:20240131
技术公布日:2024/9/23
- 还没有人留言评论。精彩留言会获得点赞!