一种防搁浅测绘无人船的制作方法
1.本实用新型涉及无人船技术领域,尤其涉及一种防搁浅测绘无人船。
背景技术:
2.海陆交汇处,如滩涂、潮间带、湿地等,是人类活动频繁、海洋生物密集、海洋功能全面的特殊区域,但也是海洋污染输入、生态灾害、自然体系破坏最集中的区域。然而在该区域,因为受到周期性的潮汐、海底起伏和底质多样的限制,通常进入该区域进行相关观测较为困难,目前主要还处于人员徒步进入、手提肩扛的境地,给观测工作带来巨大风险,且效率较低,这也导致滩涂成为海洋监测工作的薄弱地带。无人船是一种船内载有控制、通信与导航系统可用于海表面自动观测的新型无人平台,通过搭载温度、湿度、压力等多种传感器完成相关海洋测量,通常采用水下推进器的驱动方式,在近岸容易受到水草缠绕和吃水限制。已有的空气驱动无人船将风扇装在船上提供推力,可以在更广泛的水域航行,但仍具有一定的吃水深度,否则容易搁浅,因此不能应用于海陆交汇处潮间带、滩涂、湿地等区域的观测。显然实现一种不受吃水限制的防搁浅无人船,搭载相关传感器,灵活进入这些特殊区域,顺利地完成相关海洋观测是非常必要的。为此我们提出一种防搁浅测绘无人船来解决以上问题。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在现有的测绘无人船易搁浅,脱困能力差的缺点,而提出的一种防搁浅测绘无人船。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.设计一种防搁浅测绘无人船,包括无人船体和控制单元,所述无人船体的底部设有电机驱动的纵向传动轴,所述纵向传动轴的输出端固定设有螺旋桨,所述无人船体的底部设有水深探测仪,所述无人船体的两侧对称设有防搁浅装置,所述防搁浅装置包括螺旋叶轮,所述无人船体的外壁一侧通过转轴转动设有两组折叠力臂,所述折叠力臂与无人船体的外壁间设有伸缩杆,所述螺旋叶轮的两端通过转轴转动连接在折叠力臂的端部,所述螺旋叶轮的一端设有将纵向传动轴传输至螺旋叶轮的防搁浅装置。
6.优选的,所述防搁浅装置包括横向传动轴,所述横向传动轴通过轴承结构转动连接在无人船体的底部,所述纵向传动轴上固定设有第一蜗杆,所述横向传动轴上固定设有与第一蜗杆相啮合的第一蜗轮,所述纵向传动轴的两端均固定设有万向节,所述万向节远离纵向传动轴的一端固定设有花键轴,所述折叠力臂的一端通过轴承结构转动连接设有第二蜗杆,所述第二蜗杆上设有贯穿的花键槽,所述花键轴的一端延伸穿过花键槽,所述螺旋叶轮的一端固定设有与第二蜗杆相匹配的第二蜗轮。
7.优选的,所述水深探测仪通过导线与控制单元电性连接。
8.优选的,所述控制单元为单片机为核心的电路板,所述无人船体内置蓄电池,所述控制单元通过导线与蓄电池电性连接,所述伸缩杆为电动液压伸缩杆,所述伸缩杆、电机均
通过导线与控制单元电性连接。
9.本实用新型提出的一种防搁浅测绘无人船,有益效果在于:本实用新型在使用时,遇到正常水深时,由纵向传动轴驱动螺旋桨进行主动力,由纵向传动轴驱动横向传动轴将动力传递至螺旋叶轮,进行辅助动力,当水深探测仪检测到水深危险,会导致搁浅时,水深探测仪将数据反馈至控制单元,由控制单元控制伸缩杆伸缩,驱动折叠力臂翻转,进而将螺旋叶轮翻转至无人船体的底部,由于万向节的结构设计,传动装置的动力传输不会中断,进而由纵向传动轴驱动横向传动轴将动力传递至螺旋叶轮,进行螺旋螺旋叶轮的旋进运行,避免了无人船体的搁浅,本实用新型智能,防搁浅能力强,具有市场前景,适合推广。
附图说明
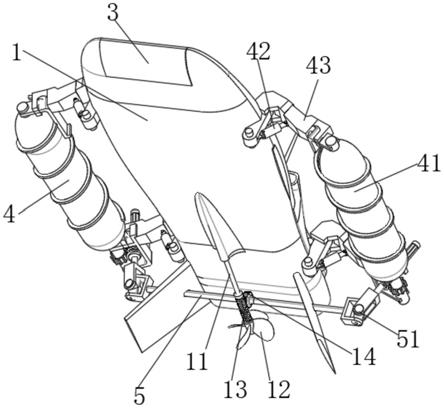
10.图1为本实用新型提出的一种防搁浅测绘无人船的正面结构示意图;
11.图2为本实用新型提出的一种防搁浅测绘无人船的底面结构示意图;
12.图3为本实用新型中提出的传动装置的结构示意图。
13.图中:无人船体1、纵向传动轴11、螺旋桨12、第一蜗杆13、第一蜗轮14、控制单元2、水深探测仪3、防搁浅装置4、螺旋叶轮41、伸缩杆42、折叠力臂43、传动装置44、第二蜗杆441、第二蜗轮442、花键槽443、横向传动轴5、万向节51、花键轴52。
具体实施方式
14.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
15.参照图1
‑
3,一种防搁浅测绘无人船,包括无人船体1和控制单元2,无人船体1的底部设有电机驱动的纵向传动轴11,纵向传动轴11的输出端固定设有螺旋桨12,无人船体1的底部设有水深探测仪3,水深探测仪3通过导线与控制单元2电性连接。
16.无人船体1的两侧对称设有防搁浅装置4,防搁浅装置4包括螺旋叶轮41,无人船体1的外壁一侧通过转轴转动设有两组折叠力臂43,折叠力臂43与无人船体1的外壁间设有伸缩杆42,控制单元2为单片机为核心的电路板,无人船体1内置蓄电池,控制单元2通过导线与蓄电池电性连接,伸缩杆42为电动液压伸缩杆,伸缩杆42、电机均通过导线与控制单元2电性连接。
17.螺旋叶轮41的两端通过转轴转动连接在折叠力臂43的端部,螺旋叶轮41的一端设有将纵向传动轴11传输至螺旋叶轮41的防搁浅装置4,防搁浅装置4包括横向传动轴5,横向传动轴5通过轴承结构转动连接在无人船体1的底部,纵向传动轴11上固定设有第一蜗杆13,横向传动轴5上固定设有与第一蜗杆13相啮合的第一蜗轮14,纵向传动轴11的两端均固定设有万向节51,万向节51远离纵向传动轴11的一端固定设有花键轴52,折叠力臂43的一端通过轴承结构转动连接设有第二蜗杆441,第二蜗杆441上设有贯穿的花键槽443,花键轴52的一端延伸穿过花键槽443,螺旋叶轮41的一端固定设有与第二蜗杆441相匹配的第二蜗轮442。
18.本实用新型在使用时,遇到正常水深时,由纵向传动轴11驱动螺旋桨12进行主动力,由纵向传动轴11驱动横向传动轴5将动力传递至螺旋叶轮41,进行辅助动力,当水深探
测仪3检测到水深危险,会导致搁浅时,水深探测仪3将数据反馈至控制单元2,由控制单元2控制伸缩杆42伸缩,驱动折叠力臂43翻转,进而将螺旋叶轮41翻转至无人船体1的底部,由于万向节51的结构设计,传动装置44的动力传输不会中断,进而由纵向传动轴11驱动横向传动轴5将动力传递至螺旋叶轮41,进行螺旋螺旋叶轮41的旋进运行,避免了无人船体1的搁浅,本实用新型智能,防搁浅能力强,具有市场前景,适合推广。
19.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种防搁浅测绘无人船,包括无人船体(1)和控制单元(2),所述无人船体(1)的底部设有电机驱动的纵向传动轴(11),所述纵向传动轴(11)的输出端固定设有螺旋桨(12),其特征在于,所述无人船体(1)的底部设有水深探测仪(3),所述无人船体(1)的两侧对称设有防搁浅装置(4),所述防搁浅装置(4)包括螺旋叶轮(41),所述无人船体(1)的外壁一侧通过转轴转动设有两组折叠力臂(43),所述折叠力臂(43)与无人船体(1)的外壁间设有伸缩杆(42),所述螺旋叶轮(41)的两端通过转轴转动连接在折叠力臂(43)的端部,所述螺旋叶轮(41)的一端设有将纵向传动轴(11)传输至螺旋叶轮(41)的防搁浅装置(4)。2.根据权利要求1所述的一种防搁浅测绘无人船,其特征在于,所述防搁浅装置(4)包括横向传动轴(5),所述横向传动轴(5)通过轴承结构转动连接在无人船体(1)的底部,所述纵向传动轴(11)上固定设有第一蜗杆(13),所述横向传动轴(5)上固定设有与第一蜗杆(13)相啮合的第一蜗轮(14),所述纵向传动轴(11)的两端均固定设有万向节(51),所述万向节(51)远离纵向传动轴(11)的一端固定设有花键轴(52),所述折叠力臂(43)的一端通过轴承结构转动连接设有第二蜗杆(441),所述第二蜗杆(441)上设有贯穿的花键槽(443),所述花键轴(52)的一端延伸穿过花键槽(443),所述螺旋叶轮(41)的一端固定设有与第二蜗杆(441)相匹配的第二蜗轮(442)。3.根据权利要求1所述的一种防搁浅测绘无人船,其特征在于,所述水深探测仪(3)通过导线与控制单元(2)电性连接。4.根据权利要求1所述的一种防搁浅测绘无人船,其特征在于,所述控制单元(2)为单片机为核心的电路板,所述无人船体(1)内置蓄电池,所述控制单元(2)通过导线与蓄电池电性连接,所述伸缩杆(42)为电动液压伸缩杆,所述伸缩杆(42)、电机均通过导线与控制单元(2)电性连接。
技术总结
本实用新型涉及无人船技术领域,尤其是一种防搁浅测绘无人船,包括无人船体和控制单元,无人船体的底部设有电机驱动的纵向传动轴,纵向传动轴的输出端固定设有螺旋桨,无人船体的底部设有水深探测仪,无人船体的两侧对称设有防搁浅装置,防搁浅装置包括螺旋叶轮,无人船体的外壁一侧通过转轴转动设有两组折叠力臂,折叠力臂与无人船体的外壁间设有伸缩杆,螺旋叶轮的两端通过转轴转动连接在折叠力臂的端部,螺旋叶轮的一端设有将纵向传动轴传输至螺旋叶轮的防搁浅装置。本实用新型智能,防搁浅能力强,具有市场前景,适合推广。适合推广。适合推广。
技术研发人员:骆军永 李瑞华 刘晓宁 张振
受保护的技术使用者:河北黍道科技有限责任公司
技术研发日:2020.12.28
技术公布日:2021/10/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1