一种探测识别水下自主机器人的制作方法
本技术涉及水下探测技术设备领域,具体为一种探测识别水下自主机器人。
背景技术:
1、随着海洋科技、海洋经济的深入发展,对海洋的认知和开发已遍布海洋的各个区域,对海洋探测设备的需求越来越迫切。海洋探测设备中,水下机器人的发展尤为迅速。
2、水下自主机器人进行探测作业时,一般包括探测和识别两个阶段:探测作业是指水下自主机器人快速航行,对设定区域进行大致探测;识别作业是指水下自主机器人根据探测作业的结果对疑似目标进行精细化识别。探测作业时,为了提高探测作业的效率和速度,往往希望水下自主机器人具有较高的航行速度和较长的续航能力;识别作业时,往往需要对疑似目标进行抵近观察及多视角观察,希望水下自主机器人具有较好的操控性能,往往需要水下自主机器人完成水中悬停、平移、前进、后退及原地回转等动作。
3、目前,水下自主机器人的航行控制形式主要包括矢量推进方式、桨舵模式以及槽道模式。矢量推进模式和桨舵模式的水下自主机器人虽然具有较低的航行阻力,可提高水下自主机器人的航行速度和续航能力,但是其操控较差,只能在航行过程中才能调整航向和定深度,不具有抵近观察和识别的能力。槽道模式的水下自主机器人虽然具有良好的航行控制能力,可实现抵近观察和识别任务,但是其航行阻力较大,给航行速度和续航时间造成了不利影响,难以完成快速探测的任务。
4、基于此,研究一种既可以满足探测作业时低阻力、高航速和长续航能力,又可以满足识别作业时具有良好操控性能的水下自主机器人势在必行。
技术实现思路
1、本实用新型的目的在于提供一种探测识别水下自主机器人,能够实现探测作业时低阻力、高航速和长续航能力,又可以满足识别作业时具有良好操控性能。
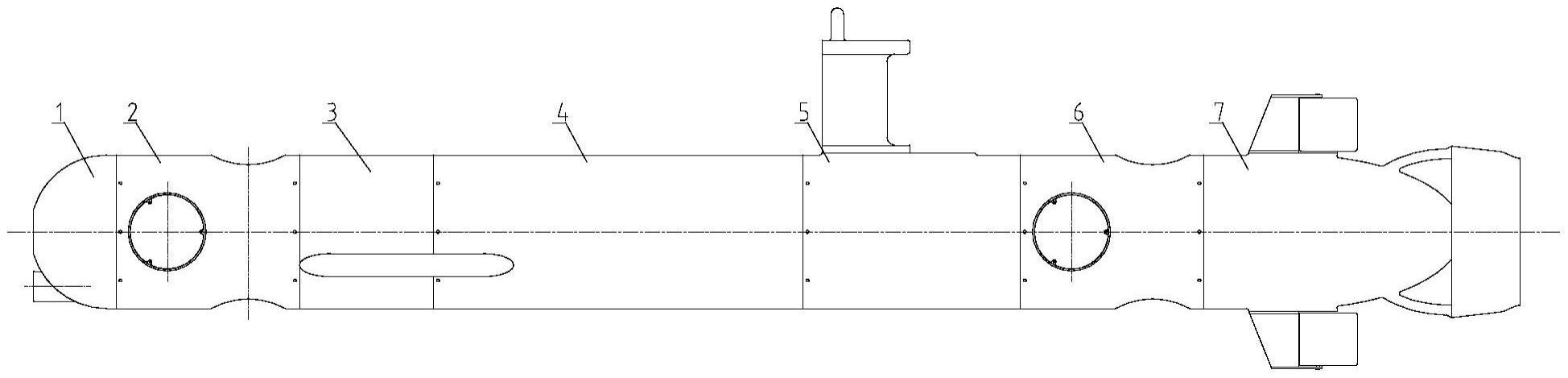
2、为实现上述目的,本实用新型提供如下技术方案:一种探测识别水下自主机器人,包括依次连接的艏段、艏部槽道段、声纳段、仪器舱段、导航段、艉部槽道段与艉部推进段,所述艏段包括艏段壳体以及固定在所述艏段壳体上的前视避碰声纳与摄像头,所述艏部槽道段、所述艉部槽道段均包括槽道推进壳体、槽道浮力块以及槽道推进模块,所述槽道推进壳体为透水结构并配有出入水孔,所述槽道浮力块安装在所述槽道推进壳体内侧壁上,所述槽道推进模块安装在所述槽道推进壳体的函道内,所述艉部推进段包括艉部壳体、艉部推进模块、舵控组件以及艉部导管,所述艉部壳体与所述艉部推进模块紧密相连组成整体,所述舵控组件与所述艉部导管设置在所述艉部壳体外侧壁上,所述艉部推进模块安装在所述艉部推进模块尾部。
3、进一步的,所述前视避碰声纳的接插件穿过所述艏段壳体并通过垫片、螺母锁紧,所述摄像头组件通过抱箍固定在所述艏段壳体底部。
4、进一步的,所述声纳段、仪器舱段、导航段通过橡胶o型圈密封、连接件紧固组成整体。
5、进一步的,所述艏段通过连接件固定在所述艏部槽道段前端,所述艉部推进段通过连接件固定在所述艉部槽道段尾端。
6、有益效果:
7、本实用新型中艏段主要由前视避碰声纳、摄像头及艏段壳体组成,共同完成该机器人前方探测及避障的工作任务。设计有两组槽道段,分布在机器人的艏部和艉部位置,共同快速完成水中悬停、平移及原地回转等指令动作,槽道段由槽道推进壳体、槽道浮力块及槽道推进模块组成,其中槽道推进壳体为透水结构,并配有出入水孔,壳体内的浮力块可为机器人提供大量浮力,更好调整机器人在水中的姿态、重浮心矩及稳心,另可根据探测水域环境等实际需求机器人可选装部分槽道推进模块完成探测任务。声纳段、仪器舱段、导航段共同组成整体,完成机器人供电、导航、通信、探测、数据存储等工作任务。机器人艉部推进段为桨前舵模式推进方式,由艉部壳体、艉部推进模块、舵控组件及艉部导管等组成;其中舵控组件中尾翼板可在航行中保护舵板不被异物缠绕,影响桨舵模式下的机器人转向及上潜下浮;其中艉部螺旋桨在艉部导管内部,有效保护了螺旋桨,极大提高了该机器人的航行安全性及整体探测效率。
技术特征:
1.一种探测识别水下自主机器人,其特征在于:包括依次连接的艏段、艏部槽道段、声纳段、仪器舱段、导航段、艉部槽道段与艉部推进段,所述艏段包括艏段壳体以及固定在所述艏段壳体上的前视避碰声纳与摄像头,所述艏部槽道段、所述艉部槽道段均包括槽道推进壳体、槽道浮力块以及槽道推进模块,所述槽道推进壳体为透水结构并配有出入水孔,所述槽道浮力块安装在所述槽道推进壳体内侧壁上,所述槽道推进模块安装在所述槽道推进壳体的函道内,所述艉部推进段包括艉部壳体、艉部推进模块、舵控组件以及艉部导管,所述艉部壳体与所述艉部推进模块紧密相连组成整体,所述舵控组件与所述艉部导管设置在所述艉部壳体外侧壁上,所述艉部推进模块安装在所述艉部推进模块尾部。
2.根据权利要求1所述的探测识别水下自主机器人,其特征在于:所述前视避碰声纳的接插件穿过所述艏段壳体并通过垫片、螺母锁紧,所述摄像头通过抱箍固定在所述艏段壳体底部。
3.根据权利要求1所述的探测识别水下自主机器人,其特征在于:所述声纳段、仪器舱段、导航段通过橡胶o型圈密封、连接件紧固组成整体。
4.根据权利要求1所述的探测识别水下自主机器人,其特征在于:所述艏段通过连接件固定在所述艏部槽道段前端,所述艉部推进段通过连接件固定在所述艉部槽道段尾端。
技术总结
本技术公开了一种探测识别水下自主机器人,包括依次连接的艏段、艏部槽道段、声纳段、仪器舱段、导航段、艉部槽道段与艉部推进段,艏段包括艏段壳体以及固定在艏段壳体上的前视避碰声纳与摄像头,艏部槽道段与艉部槽道段均包括槽道推进壳体,槽道浮力块以及槽道推进模块,槽道推进壳体为透水结构并配有出入水孔,槽道浮力块安装在槽道推进壳体内侧壁上,槽道推进模块安装在槽道推进壳体的函道内,艉部推进段包括艉部壳体、艉部推进模块、舵控组件以及艉部导管。本技术能够实现探测作业时低阻力、高航速和长续航能力,又可以满足识别作业时具有良好操控性能。
技术研发人员:伍红权,周暠宸,李森
受保护的技术使用者:中科探海(苏州)海洋科技有限责任公司
技术研发日:20211206
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!