一种流体动力超空泡航行器及其航行控制方法与流程
本发明涉及航行器,尤其涉及一种流体动力超空泡航行器及其航行控制方法。
背景技术:
1、水下航行器在速度达到一定值时,由于表面上压力分布的变化,在部分位置可能造成压力小于水的蒸汽压,使水由液态转换为气态,覆盖在航行器表面。利用这个原理,各国对其水下减阻能力进行了研究,并研制出了超空泡航行器。目前,超空泡航行器的应用难点主要在其机动控制上。由于航行器大部分表面被空泡包裹,其流体动力特性与常规航行器有很大的不同。能够为航行器提供控制力的部位仅有头部空化器位置和尾部沾湿面或者鳍舵结构。
2、对头部空化器:当前的超空泡航行器流体动力布局方案中,头部空化器作为稳定的沾湿部件,其流体动力特性可以通过试验预先测出。但是在实际应用中,空化器部件还需要承担声呐系统的安装、改变迎流角以提供控制力等作用。在空化器部分安装声呐要求空化器部件不能太小,要能够容纳声呐部件,因此空化器的形状及大小都有一定的限制,从而影响了空化器部分的流体动力特性。当采用空化器操舵来控制航行器运动时,空化器迎流角的改变会造成空泡形态的改变,进而影响航行器的沾湿状态和流体动力,造成航行的不稳定。因此,采用空化器作为控制部件有一定的不利因素。
3、对航行器尾部:航行器尾部的沾湿面变化较为剧烈,难以预先判断,因此其流体动力也很难预先知道,这使得控制策略的选择变得困难。尾部采用鳍舵结构,能够为航行器提供一定的稳定力矩,同时增加航行器航行过程中的稳定性。但是,现有的鳍舵结构,在航行过程中的沾湿面也是随着航行器迎流角变化的,其产生的流体动力大小也是难以预知的。因此,现有的鳍舵结构对于实现超空泡航行器的控制,是比较困难的。
4、目前超空泡航行器运动的稳定性及机动性是影响超空泡航行器应用的一大障碍。当前国内研究的超空泡航行器控制机构的布局方式中,作为机动控制机构的主要有航行器头部空化器、航行器上控制舵两种。空化器作为机动控制机构,会因为迎流面的变化和产生的升力影响生成的超空泡形态,且其所能提供的升力大小受空化器自身限制;超空泡航行器上的控制舵则由于在机动过程中空泡的形态变化而使控制舵的控制力难以预测,控制策略选择较为困难。航行器尾部的圆柱状外形也难以满足航行器的操控性和稳定性需求。虽然国内外对超空泡航行器的控制问题进行了大量研究,但目前公开的国内外超空泡航行器的稳定性和操控性都难以达到较好的应用要求。
技术实现思路
1、鉴于上述的分析,本发明旨在提供一种流体动力超空泡航行器及其航行控制方法,用以解决现有超空泡航行器的稳定性和操控性差的问题。
2、本发明的目的主要是通过以下技术方案实现的:
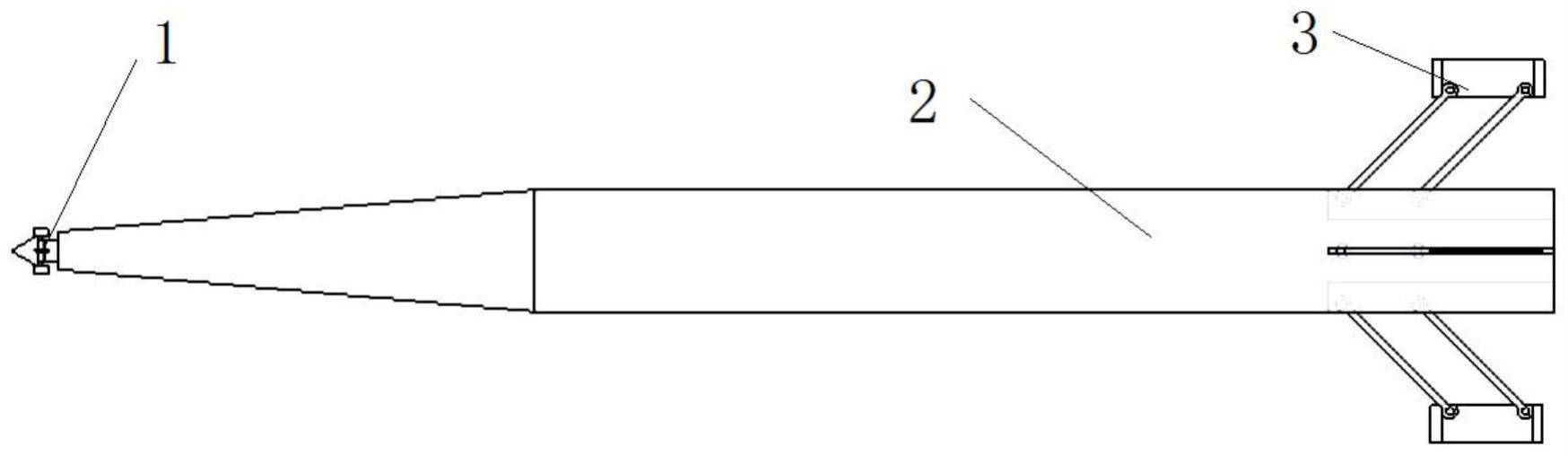
3、一种流体动力超空泡航行器,包括:空化器、航行器主体和尾鳍;所述空化器设置在航行器主体的前端,所述尾鳍设置在所述航行器主体上;所述空化器用于在航行器航行时产生稳定空泡;所述空化器的后端设置多个舵片,并通过所述舵片调整航向;所述尾鳍为可展开/收缩的结构。
4、进一步地,所述舵片包括:第一舵片、第二舵片、第三舵片和第四舵片。
5、进一步地,所述第一舵片、第二舵片、第三舵片和第四舵片在航行器的圆周方向上均匀分布。
6、所述空化器前端具有锥形部。
7、所述舵片通过舵片轴转动安装在空化器的后端。
8、所述舵片的横截面为三角形结构;且舵片的尖端朝向所述锥形部方向。
9、进一步地,所述第一舵片和第三舵片均为竖直舵片。所述第二舵片和第四舵片均为水平舵片。
10、进一步地,所述舵片能够通过第一驱动电机驱动偏转。
11、进一步地,所述第一驱动电机设有三台,所述竖直舵片由同一个第一驱动电机驱动;两个水平舵片分别通过两台第一驱动电机分别驱动。
12、进一步地,所述第一驱动电机通过连杆机构带动所述舵片偏转;所述连杆机构包括:第一连杆、第二连杆和第三连杆。
13、所述第一连杆一端与第一驱动电机固定连接,另一端与第二连杆铰接;所述第二连杆一端铰接第一连杆,另一端铰接第三连杆;所述第三连杆一端与所述第二连杆铰接,另一端与所述舵片轴固定连接。
14、所述驱动电机带动第一连杆偏转时,所述第三连杆能够带动所述舵片轴偏转,进而带动舵片偏转。
15、进一步地,所述尾鳍通过第二驱动电机驱动展开或收缩。
16、进一步地,所述尾鳍包括:尾舵片和尾连杆;所述尾连杆有两根,且两根尾连杆相互平行;所述尾连杆一端与尾舵片铰接,另一端与所述航行器主体的尾端铰接;所述第二驱动电机用于驱动所述尾连杆偏转。
17、进一步地,所述尾鳍在所述航行器主体的尾端周向设置四个。
18、进一步地,所述第二驱动电机有多台,分别驱动多个尾鳍。
19、进一步地,航行器还设有力矩传感器,所述力矩传感器用于监测航行所述尾舵片和连杆所受的压力。
20、一种流体动力超空泡航行器的航行控制方法,包括以下步骤:
21、步骤s1:直行状态时,竖直舵片和水平舵片的尖端均朝向航行器的行进方向;
22、步骤s2:当需要调整航行器的航向时,通过第一驱动电机控制舵片偏转,进而实现航行器的机动动作;
23、步骤s3:当航行器稳定航行时,尾鳍处于展开状态;当航行器处于机动状态时,尾鳍处于收缩状态。
24、本发明技术方案至少能够实现以下效果之一:
25、1.本发明的流体动力超空泡航行器,设有四个截横面为三角形的舵片,通过对四个舵片的操控来实现航行器的机动。由于三角形舵片的迎流面较小,受到的阻力很小,而其提供的升力却很明显,因而能够提供足够的控制力。
26、2.本发明的超空泡航行器在空化器部分安装舵片和在尾部安装稳定鳍结构的流体动力布局方法,以及利用头部控制舵实现对航行器横滚的主动控制,利用头、尾的结构特征机头、尾的共同主动控制,实现对航行器运动的控制。
27、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
技术特征:
1.一种流体动力超空泡航行器,其特征在于,包括:空化器(1)、航行器主体(2)和尾鳍(3);所述空化器(1)设置在航行器主体(2)的前端,所述尾鳍(3)设置在所述航行器主体(2)上;所述空化器(1)用于在航行器航行时产生稳定空泡;所述空化器(1)的后端设置多个舵片,并通过所述舵片调整航向。
2.根据权利要求1所述的流体动力超空泡航行器,其特征在于,所述舵片包括:第一舵片(11)、第二舵片(12)、第三舵片(13)和第四舵片(14)。
3.根据权利要求1或2所述的流体动力超空泡航行器,其特征在于,所述舵片通过舵片轴(16)转动安装在空化器(1)的后端。
4.根据权利要求3所述的流体动力超空泡航行器,其特征在于,所述舵片能够通过第一驱动电机(101)驱动偏转。
5.根据权利要求4所述的流体动力超空泡航行器,其特征在于,所述尾鳍(3)包括:尾舵片(31)和尾连杆(32)。
6.根据权利要求5所述的流体动力超空泡航行器,其特征在于,所述尾连杆(32)有两根,且两根尾连杆(32)相互平行;所述尾连杆(32)一端与尾舵片(31)铰接,另一端与所述航行器主体(2)的尾端铰接。
7.根据权利要求6所述的流体动力超空泡航行器,其特征在于,所述尾连杆(32)通过第二驱动电机(33)驱动偏转。
8.根据权利要求7所述的流体动力超空泡航行器,其特征在于,所述第二驱动电机(33)有多台,分别驱动多个尾鳍(3)。
9.根据权利要求8所述的流体动力超空泡航行器,其特征在于,还设有力矩传感器,所述力矩传感器用于监测航行所述尾舵片和连杆所受的压力。
10.根据权利要求1-9任一所述的流体动力超空泡航行器的航行控制方法,其特征在于,包括以下步骤:
技术总结
本发明涉及一种流体动力超空泡航行器及其航行控制方法,属于航行器技术领域,解决了现有技术中超空泡航行器的稳定性和操控性差的问题。一种流体动力超空泡航行器,其特征在于,包括:空化器、航行器主体和尾鳍;所述空化器设置在航行器主体的前端,所述尾鳍设置在所述航行器主体的尾端;所述空化器用于在航行器航行时产生稳定空泡;所述空化器的后端设置多个舵片,并通过所述舵片调整航向;所述尾鳍为可展开/收缩的结构。本发明实现了对水下超空泡航行器的航行控制,并且提高了航行稳定性。
技术研发人员:栗夫园,戴立江,王淑志
受保护的技术使用者:北京机械设备研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!