一种水下深埋物打捞系统的制作方法
本发明涉及水下深埋物探测,具体涉及一种水下深埋物打捞系统。
背景技术:
1、在水下打捞作业中,经常会遇到深埋泥下的打捞对象,如海底管线、扎入泥中的uuv、掩埋的特殊物体等,这类打捞作业受周围淤泥的影响存在目标不可见、容易坍塌、打捞难度大等问题。现有的此类打捞大多采用大范围开挖、围堰等方式,但是当全埋深度超过20米以上且土质为软性淤泥时,这种方法施工难度会急剧增加,且对水下环境破坏严重。
2、中国专利申请cn112319735a中公开了一种缆控打捞潜水器的打捞装备,但由于作业时需要提前获得精确的目标方位和深度等信息,无法适用于深埋物的打捞。
技术实现思路
1、针对上述问题,发明人提供了一种兼具目标探摸定位和清淤打捞功能的打捞系统,解决了水下深埋物目标不可见,打捞难度大等问题。
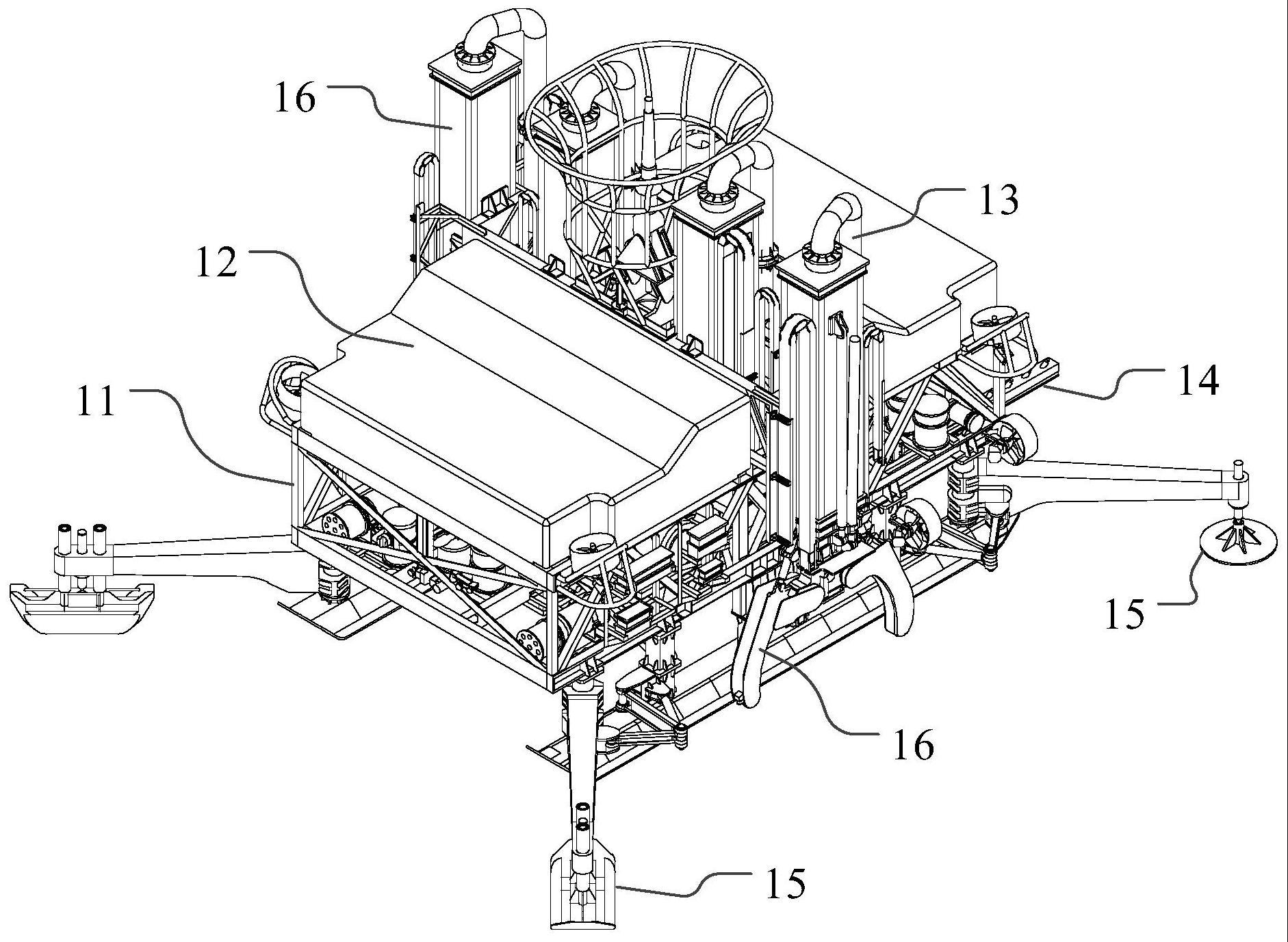
2、一种水下深埋物打捞系统,包括:水下潜水器和设于所述水下潜水器上的抓取机构,所述水下潜水器与母船通过脐带缆连接,所述水下潜水器上设有:
3、探摸臂,转动连接在水下潜水器底部,用于转动下探水下深埋物,其包括探摸本体、探摸喷冲组件和感应组件,所述探摸喷冲组件设于探摸本体上,用于在探摸本体下探时清除深埋管状物上的淤泥;所述感应组件设于探摸本体上,用于感应探摸本体是否触碰到水下深埋物;
4、防沉降支腿机构,至少包括分设于水下潜水器底部四角的四个支撑单元,每个所述支撑单元均配置成可收放结构,以旋出水下潜水器底部或旋回水下潜水器底部;
5、喷冲系统,所述喷冲系统通过管路与探摸喷冲组件连接,用于向所述探摸喷冲组件提供高压水;
6、所述抓取机构沿同一直线排布有多个,多个所述抓取机构配合,抓取水下深埋物。
7、进一步地,所述感应组件包括:
8、翘板;设于所述探摸本体底部,且与探摸本体浮动连接;
9、受力传感器,设于所述探摸本体内部,用于感应翘板所受阻力。
10、进一步地,所述探摸本体通过安装座与水下潜水器转动连接,所述探摸喷冲组件包括:
11、供水管路,设于所述安装座上;
12、水路通道,设于所述探摸本体内部,所述供水管路与水路通道通过气液滑环连接;
13、所述水路通道上设有若干个喷嘴;所述翘板上设有多个喷冲孔,所述喷嘴与喷冲孔相对应。
14、进一步地,所述支撑单元均包括:
15、转动组件,设于水下潜水器底部;
16、支撑组件,设于所述转动组件远离水下潜水器的一端,用于支撑水下潜水器,所述支撑组件配置成沿竖直方向移动;
17、所述转动组件带动支撑组件旋出水下潜水器底部或旋回水下潜水器底部。
18、进一步地,所述转动组件包括:
19、转轴,固定于水下潜水器的底部;
20、转臂,一端通过轴承与所述转轴连接,另一端与支撑组件连接;所述转臂与轴承的连接处设有角度传感器,所述角度传感器用于测量转臂转角。
21、摆动组件,设于所述水下潜水器上,且与转臂连接,用于带动转臂绕转轴转动;
22、所述摆动组件包括:
23、固定座,设于所述水下潜水器的底部;
24、第一摆杆,与所述转臂铰接;
25、第二摆杆,一端与所述第一摆杆铰接,另一端与所述固定座铰接;
26、摆动驱动件,设于所述固定座上,与所述第二摆杆连接,用于驱动第二摆杆和第一摆杆摆动,从而带动转臂转动。
27、进一步地,所述支撑组件包括:
28、支撑件;位于水下潜水器前端底部的支撑件为滑翘,位于水下潜水器后端底部的支撑件为支撑圆盘;
29、升降驱动件,设于所述转臂上,且与支撑件连接,用于带动支撑件升降;
30、进一步地,每个所述抓取机构均包括:
31、手爪;
32、手爪驱动件;
33、伸缩组件,与所述手爪固定连接,用于带动所述手爪伸缩;
34、抓取喷冲组件,设于所述手爪内部,并通过直线水滑环与所述喷冲系统的管路连接,用于在抓取过程中进一步清除深埋管状物上的淤泥;
35、触探组件,设于所述手爪顶部,用于打捞过程中触探被手爪抓取的深埋管状物,避免手爪过度合拢。
36、进一步地,所述抓取喷冲组件包括:
37、喷冲水路,设于所述伸缩组件内部,并沿伸缩组件内部进入手爪内部,其通过所述直线水滑环与所述喷冲系统的管路连接;
38、多个隐形喷嘴,设于所述手爪内部,并与喷冲水路连接。
39、进一步地,所述触探组件包括:
40、导向柱,设于手爪顶部,其上设有弹簧;
41、触探板,设于导向柱底部,触探板受深埋管状物挤压时带动导向柱向上移动;
42、接近开关,设于导向柱上方,用于感应导向柱。
43、进一步地,所述抓取机构还包括:用于测量手爪合拢力的传感器组,所述传感器组包括:
44、力传感器和油压传感器中的一个或多个;
45、所述力传感器设置在手爪驱动件的轴销处;所述油压传感器设置在手爪驱动件的驱动油路上。
46、本发明的工作原理:
47、作业前探摸臂处于收回状态;水下潜水器到达指定位置开启高压喷冲水给探摸臂供水,高压水从探摸臂喷嘴射出后可形成喷射破土。随后驱动探摸臂转动下放,直至到达指定深度,期间持续保持高压喷冲破土状态;或者水下潜水器在按照预先设定的轨迹贴底航行时,探摸臂在水下潜水器的带动下在泥下边喷冲破土边移动。在探摸过程中,通过感应组件感应阻力,若出现阻力突然增加的情况,则停止移动,通过探摸臂多次小幅伸缩对前方进行探测及确认。
48、确认发现目标后,水下潜水器进行定位记录,随后将探摸臂复位;水下潜水器通过防沉降支腿机构坐底,进行管状物打捞。
49、与现有技术相比,本发明的有益效果:
50、(1)本发明采用探摸臂探摸确定深埋物位置,再由抓取机构进行抓取的方式,实现对深埋物的准确定位,从而可对深埋于泥下的物体进行挖掘打捞。
51、(2)采用探摸喷冲的方式,可在探摸过程中将深埋物表面进行破土,从而减小打捞过程中抓取机构收到的阻力,同时可有效避免深埋物(特别是管状深埋物)受淤泥影响出现弯折、破损等问题,从而保护深埋物。
52、(3)防沉降支腿机构在水下潜水器下水/出水过程中可收至潜水器底部,布放/回收相对更为方便。
技术特征:
1.一种水下深埋物打捞系统,包括:水下潜水器和设于所述水下潜水器上的抓取机构,所述水下潜水器与母船通过脐带缆连接,其特征在于,还包括:
2.如权利要求1所述的打捞系统,其特征在于,所述感应组件包括:
3.如权利要求2所述的打捞系统,其特征在于,所述探摸本体通过安装座与水下潜水器转动连接,所述探摸喷冲组件包括:
4.如权利要求1所述的打捞系统,其特征在于,所述支撑单元均包括:
5.如权利要求4所述的打捞系统,其特征在于,所述转动组件包括:
6.如权利要求4所述的打捞系统,其特征在于,所述支撑组件包括:
7.如权利要求1所述的打捞系统,其特征在于,所述抓取机构包括:
8.如权利要求7所述的打捞系统,其特征在于,所述抓取喷冲组件包括:
9.如权利要求7所述的打捞系统,其特征在于,所述触探组件包括:
10.如权利要求7所述的打捞系统,其特征在于,所述抓取机构还包括:用于测量手爪合拢力的传感器组,所述传感器组包括:
技术总结
本发明公开了一种水下深埋物打捞系统,包括:水下潜水器、抓取机构、防沉降支腿机构和喷冲系统,其中,探摸臂转动连接在水下潜水器底部,用于转动下探水下深埋物,其包括探摸本体、探摸喷冲组件和感应组件,用于探摸水下深埋物;防沉降支腿机构,至少包括分设于水下潜水器底部四角的四个支撑单元,每个支撑单元均配置成可收放结构;喷冲系统通过管路与探摸喷冲组件连接,用于向探摸喷冲组件提供高压水;该系统采用探摸臂探摸确定深埋物位置,再由抓取机构进行抓取的方式,实现对深埋物的准确定位、低难度打捞,对水下周围环境破坏性较小,安全性高,在水下打捞、海底管线维护等领域具有广泛的应用前景。
技术研发人员:杨帆,张翔龙,王旭阳,郭亮,陈静,褚伟
受保护的技术使用者:中国船舶重工集团公司七五0试验场
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!