一种船舶清理水下机器人的制作方法
1.本实用新型涉及船舶清理技术领域,特别是涉及一种船舶清理水下机器人。
背景技术:
2.船舶在工作5年左右就需要对其船体外表面进行清理,尤其是船体底部吸附生长的寄生物,传统的清洗方式包括两种,一种为高压水枪进行清理,然而高压水枪清理需要船体整体裸露,清理耗时长;另一种为水下机器人清理,但是现有的水下机器人在作业的时候能耗大。
3.授权公告号为cn216546629u的中国专利公开了一种用于船舶璧面清刷的水下机器人,包括舱体、安装于舱体中部的密封舱、设于密封舱底部两侧的履带装置、设于密封舱底部四角处的四个浮潜螺旋桨、设于密封舱端壁两侧的进退螺旋桨,其中浮潜螺旋桨用于控制舱体的上浮下潜运动,进退螺旋桨用于控制舱体的前进后退运动;所述舱体底部靠后位置设有四个磨盘,四个磨盘以舱体底部中线为轴皆向内旋转,舱体顶部设有酶解发射装置。该实用新型采用磨盘与发射酶弹相结合的水下清理方式,在水下机器人底部靠后设有两对磨盘,在旋转过程中既可以保护船体涂层,也能达到打掉附着物的作业效果,同时配合酶解发射装置的布置,可以更有效地清除船舶壁面的顽固生物,。
4.但是该装置仍然存在着不足之处:水下机器人的浮潜螺旋桨需要时刻处于运转状态,其本身能耗高,根据公知,水下机器人的功供能方式主要为其自身内部提供,在浮潜螺旋桨分担之后,其续航能力明显不足,因此需要在现有结构基础上加以改进。
技术实现要素:
5.本实用新型目的是针对背景技术中存在的问题,提出一种船舶清理水下机器人。
6.本实用新型的技术方案:一种船舶清理水下机器人,包括水下机器人、支架、驱动盘b、机械臂、限位板、液压缸、剪叉式支架和安装板。
7.水下机器人上设置驱动盘a,驱动盘a驱动连接支架,支架上转动设置摄像机,支架上设置电机,电机驱动连接摄像机。驱动盘b设置在水下机器人上,驱动盘b驱动连接机械臂,机械臂的输出端设置打磨机。
8.限位板对称设置在水下机器人上,限位板上对称设置两个滑槽,滑槽内贯穿设置滑杆,滑杆与滑槽滑动连接。滑杆上设置滑块,滑块与限位板滑动连接。液压缸设置在限位板上,液压缸驱动连接滑块。剪叉式支架设置在限位板的内侧,剪叉式支架的一侧底脚与限位板转动连接,另一侧底脚与滑杆转动连接,剪叉式支架驱动连接安装板。
9.安装板上设置驱动箱,驱动箱上设置转向轮,且驱动箱上对称设置两组支撑轮,转向轮与支撑轮的弧面均设置电磁环。
10.优选的,水下机器人上设置推进器,推进器包括升降桨、转向桨以及水平推进桨,各桨的进水端均设置防护网。
11.优选的,还包括数据终端。水下机器人上设置水密舱,水密舱内设置控制组件,摄
像机与控制组件电性连接,且水密舱内设置信号收发器,信号收发器与控制器电性连接,信号收发器与数据终端通信连接。
12.优选的,驱动箱内设置驱动组件a和驱动组件b,驱动组件a驱动连接转向轮,驱动组件b驱动连接支撑轮,控制器控制连接驱动组件。
13.优选的,水下机器人的侧板上设置若干通孔。
14.优选的,摄像机的镜头侧面环绕设置若干个照明灯。
15.与现有技术相比,本实用新型具有如下有益的技术效果:
16.通过在水下机器人上设置摄像机,利用摄像机所摄取的画面可以方便机舱内工作人员根据船体具体情况控制水下机器人移动至指定地方进行清理;通过在水下机器人上设置机械臂,机械臂驱动打磨机进行角度转换,方便对船体不同部位进行打磨清理;通过设置剪叉式支架,利用剪叉式支架驱动安装板伸缩,使安装板上的支撑轮和转向轮接触船体表面,同时利用支撑轮和转向轮上的电磁环,将水下机器人吸附在船体表面,无需使推进器持续保持工作状态,进而节省整个清理过程中的能耗。
附图说明
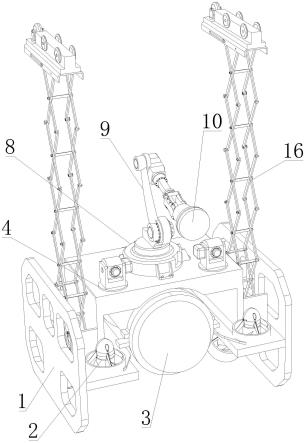
17.图1为本实用新型中一种实施例的结构示意图;
18.图2为图1中驱动盘a上各部件的连接结构图;
19.图3为图1中安装板上各部件的连接结构图。
20.附图标记:1、水下机器人;2、推进器;3、水密舱;4、驱动盘a;5、支架;6、摄像机;7、电机;8、驱动盘b;9、机械臂;10、打磨机;11、限位板;12、滑槽;13、滑杆;14、滑块;15、液压缸;16、剪叉式支架;17、安装板;18、驱动箱;19、转向轮;20、支撑轮;21、电磁环。
具体实施方式
21.实施例一
22.如图1-3所示,本实用新型提出的一种船舶清理水下机器人,包括水下机器人1、支架5、驱动盘b8、机械臂9、限位板11、液压缸15、剪叉式支架16和安装板17。水下机器人1上设置驱动盘a4,驱动盘a4驱动连接支架5,支架5上转动设置摄像机6,支架5上设置电机7,电机7驱动连接摄像机6。驱动盘b8设置在水下机器人1上,驱动盘b8驱动连接机械臂9,机械臂9的输出端设置打磨机10。限位板11对称设置在水下机器人1上,限位板11上对称设置两个滑槽12,滑槽12内贯穿设置滑杆13,滑杆13与滑槽12滑动连接。滑杆13上设置滑块14,滑块14与限位板11滑动连接。液压缸15设置在限位板11上,液压缸15驱动连接滑块14。剪叉式支架16设置在限位板11的内侧,剪叉式支架16的一侧底脚与限位板11转动连接,另一侧底脚与滑杆13转动连接,剪叉式支架16驱动连接安装板17。安装板17上设置驱动箱18,驱动箱18上设置转向轮19,且驱动箱18上对称设置两组支撑轮20,转向轮19与支撑轮20的弧面均设置电磁环21。
23.本实施例中,将水下机器人1置于水下,启动液压缸15,剪叉式支架16在液压缸15的作用下推动安装板伸出,此时将水下机器人1的转向轮19和支撑轮20与船体表面抵紧,启动电磁环21,电磁环21通电后转向轮19与支撑轮20吸附在船体表面,此时通过摄像机6拍摄船体表面画面,工作人员根据回传的画面控制水下机器人1移动,随后启动机械臂9,机械臂
9驱动打磨机10,利用高速转动的砂轮盘对船体附着有寄生物的区域进行打磨,打磨深度控制在砂轮盘不与船体表面直接接触即可,打磨过程水下机器人主要依靠电磁环21固定在船体上,能耗低,续航时间长。
24.实施例二
25.本实用新型提出的一种船舶清理水下机器人,相较于实施例一,还包括数据终端。水下机器人1上设置水密舱3,水密舱3内设置控制组件,摄像机6与控制组件电性连接,且水密舱3内设置信号收发器,信号收发器与控制器电性连接,信号收发器与数据终端通信连接。
26.本实施例中,控制组件对摄像机6拍摄的画面进行整理,数据画面转换成数字信号并最终通过信号收发器传输到工作人员数据终端。
27.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。
技术特征:
1.一种船舶清理水下机器人,其特征在于,包括水下机器人(1)、支架(5)、驱动盘b(8)、机械臂(9)、限位板(11)、液压缸(15)、剪叉式支架(16)和安装板(17);水下机器人(1)上设置驱动盘a(4),驱动盘a(4)驱动连接支架(5),支架(5)上转动设置摄像机(6),支架(5)上设置电机(7),电机(7)驱动连接摄像机(6);驱动盘b(8)设置在水下机器人(1)上,驱动盘b(8)驱动连接机械臂(9),机械臂(9)的输出端设置打磨机(10);限位板(11)对称设置在水下机器人(1)上,限位板(11)上对称设置两个滑槽(12),滑槽(12)内贯穿设置滑杆(13),滑杆(13)与滑槽(12)滑动连接;滑杆(13)上设置滑块(14),滑块(14)与限位板(11)滑动连接;液压缸(15)设置在限位板(11)上,液压缸(15)驱动连接滑块(14);剪叉式支架(16)设置在限位板(11)的内侧,剪叉式支架(16)的一侧底脚与限位板(11)转动连接,另一侧底脚与滑杆(13)转动连接,剪叉式支架(16)驱动连接安装板(17);安装板(17)上设置驱动箱(18),驱动箱(18)上设置转向轮(19),且驱动箱(18)上对称设置两组支撑轮(20),转向轮(19)与支撑轮(20)的弧面均设置电磁环(21)。2.根据权利要求1所述的一种船舶清理水下机器人,其特征在于,水下机器人(1)上设置推进器,推进器包括升降桨、转向桨以及水平推进桨,各桨的进水端均设置防护网。3.根据权利要求1所述的一种船舶清理水下机器人,其特征在于,还包括数据终端;水下机器人(1)上设置水密舱(3),水密舱(3)内设置控制组件,摄像机(6)与控制组件电性连接,且水密舱(3)内设置信号收发器,信号收发器与控制器电性连接,信号收发器与数据终端通信连接。4.根据权利要求3所述的一种船舶清理水下机器人,其特征在于,驱动箱(18)内设置驱动组件a和驱动组件b,驱动组件a驱动连接转向轮(19),驱动组件b驱动连接支撑轮(20),控制器控制连接驱动组件。5.根据权利要求1所述的一种船舶清理水下机器人,其特征在于,水下机器人(1)的侧板上设置若干通孔。6.根据权利要求1所述的一种船舶清理水下机器人,其特征在于,摄像机(6)的镜头侧面环绕设置若干个照明灯。
技术总结
本实用新型涉及船舶清理技术领域,特别是涉及一种船舶清理水下机器人,其包括水下机器人、支架、驱动盘B、机械臂、限位板、液压缸、剪叉式支架和安装板。水下机器人上设置驱动盘A,驱动盘A驱动连接支架,支架上转动设置摄像机。驱动盘B驱动连接机械臂,机械臂的输出端设置打磨机。限位板对称设置在水下机器人上,限位板上设置由液压缸驱动的剪叉式支架,剪叉式支架驱动连接安装板。安装板上设置驱动箱,驱动箱上设置转向轮,且驱动箱上对称设置两组支撑轮,转向轮与支撑轮的弧面均设置电磁环。本实用新型通过电磁环与船体之间的吸附力将水下机器人固定在船体表面,可以达到节省能耗的目的,进而延长水下机器人的作业时间。进而延长水下机器人的作业时间。进而延长水下机器人的作业时间。
技术研发人员:张扬 吴倩 邢娟 桑延
受保护的技术使用者:宁波星与海科技有限公司
技术研发日:2022.10.19
技术公布日:2023/1/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1