一种三轴移动式双船浮托运动补偿方法
本发明涉及海洋工程,尤其涉及一种三轴移动式双船浮托运动补偿方法。
背景技术:
1、随着海洋开发不断向深远海迈进,海上平台日趋规模化和大型化,传统的海洋平台吊装法由于成本、技术的限制,无法满足其需求,海洋平台浮托法安装应运而生,即通过运输驳船将海洋平台上部组块运输至安装位置,通过涨落潮海水潮位变化和压载水舱加载将上部组块转移至导管架上。
2、传统的浮托安装作业系统中,运动补偿装置多为被动式,通过对接装置中给的桩腿耦合装置起到被动补偿的作用,然而,被动运动补偿方法无论就可以补偿的操作范围而言亦或能够承载的上部组块质量均十分有限,只能起到被动缓冲减振的作用,且补偿功能无法作用于浮托安装作业全程,仅能在载荷转移过程当中起到在作用,此外无法对补偿过程及补偿效果进行人为控制,不利于安装进程的作业与监测,因此提出一种三轴移动式双船浮托运动补偿方法解决上述问题。
技术实现思路
1、本发明的目的是为了解决现有技术中的问题,而提出的一种三轴移动式双船浮托运动补偿方法。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种三轴移动式双船浮托运动补偿方法,包括如下步骤:
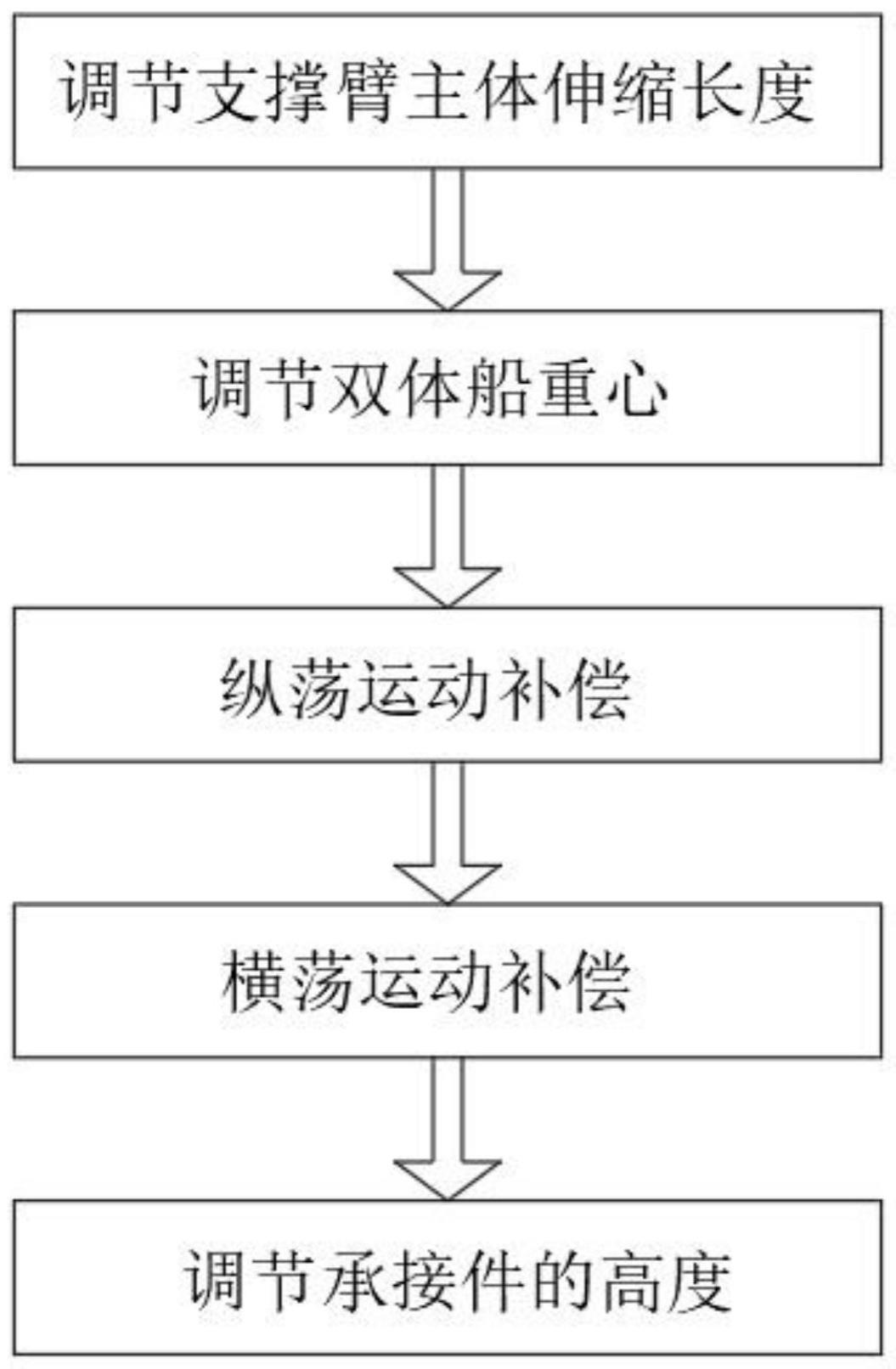
4、s1、调节支撑臂主体伸缩长度:根据需要作业的海洋平台上部组块尺寸和导管架基础,调整支撑臂主体伸出长度;
5、s2、调节双体船重心:根据支撑臂主体伸缩的长度,使得配重舱向舱内进行加载和排载,使双体船在进行浮托作业时重心不致偏移,维持双体船在浮托作业过程中的稳定;
6、s3、纵荡运动补偿:通过监测双体船在浮托作业过程中的纵荡运动使支撑臂随之沿导轨移动,完成对双体船在纵荡运动上的运动补偿;
7、s4、横荡运动补偿:支撑臂可以根据作业过程中监测到的双体船的横荡运动横向移动,保持支撑臂末端点的稳定,以达到补偿双体船横荡运动的功能;
8、s5、调节承接件的高度:通过伸缩油缸推动连接件运动,同时使得辅助液压缸带动连接件的底端拐角回缩,使得连接件以顶端拐角为圆心进行旋转,进而使得连接件顶端拐角推动u型块转动,u型块通过万向铰带动h型块下移,降低h型块的高度,反之,使得伸缩油缸伸长,辅助液压缸缩短,则使得h型块的高度降低;
9、所述导轨设置在双体船的甲板上,所述支撑臂的底端设置有滑轮,所述配重舱通过卡扣安装在支撑臂主体的顶端,所述卡扣的底端开设有梯形槽,所述梯形槽与导轨滑动连接,所述支撑臂主体的一端对称开设有开口,所述开口的底端开设有球窝,所述支撑臂主体的顶端靠近开口处固定连接有定位杆,所述定位杆的一端开设有凹槽。
10、优选的,所述开口的内部设置有伸缩油缸和辅助液压缸,所述伸缩油缸和辅助液压缸的底端与球窝球铰连接。
11、优选的,所述伸缩油缸的一端与连接件的顶端拐角铰接,所述辅助液压缸的一端与连接件的底端拐角铰接。
12、优选的,所述u型块的一侧面靠近底端处固定连接有转接槽体,所述转接槽体与连接件的拐角铰接。
13、优选的,所述u型块的一侧面靠近顶端处通过万向铰和工型块连接,所述u型块的一侧面固定连接有固定块,所述固定块与定位杆转动连接。
14、优选的,所述u型块和工型块组成承接件,所述承接件的顶端放置有上部组块。
15、优选的,所述连接件呈三角形状,所述连接件的四个拐角均开设有转向孔。
16、相比现有技术,本发明的有益效果为:
17、1、本发明在双体船进行浮托作业时,通过在双体船甲板安装支撑臂等部件,可以在双体船进行浮托安装或拆卸作业时,对双体船的横荡、纵荡和横摇等运动进行主动补偿,有别于传统的被动补偿方法,克服了无法对运动补偿过程进行人为干预的弊端,并且此方法与传统的被动补偿相比扩大了双体船运动补偿的范围。
18、2、本发明通过监测双体船在浮托作业过程中的纵荡运动使支撑臂随之沿导轨移动,完成对双体船在纵荡运动上的运动补偿。
19、3、本发明通过设置有配重舱,配重舱主要用于根据支撑臂主体伸缩的长度向舱内进行加载和排水,使双体船在进行浮托作业时重心不致偏移,维持双体船在浮托作业过程中的稳定。
20、4、本发明通过设置有支撑臂,支撑臂可以根据作业过程中监测到的双体船的横荡运动横向移动,保持支撑臂末端点的稳定,以达到补偿双体船横荡运动的功能。
21、5、本发明通过设置伸缩油缸、辅助液压缸和连接件,可以调节承接件位姿进一步调节支撑点位置,维持上部组块位姿稳定的目的。
技术特征:
1.一种三轴移动式双船浮托运动补偿方法,包括如下步骤:
2.根据权利要求1所述的一种三轴移动式双船浮托运动补偿方法,其特征在于:所述开口(205)的内部设置有伸缩油缸(202)和辅助液压缸(5),所述伸缩油缸(202)和辅助液压缸(5)的底端与球窝(206)球铰连接。
3.根据权利要求2所述的一种三轴移动式双船浮托运动补偿方法,其特征在于:所述伸缩油缸(202)的一端与连接件(203)的顶端拐角铰接,所述辅助液压缸(5)的一端与连接件(203)的底端拐角铰接。
4.根据权利要求3所述的一种三轴移动式双船浮托运动补偿方法,其特征在于:所述u型块(2041)的一侧面靠近底端处固定连接有转接槽体,所述转接槽体与连接件(203)的拐角铰接。
5.根据权利要求1所述的一种三轴移动式双船浮托运动补偿方法,其特征在于:所述u型块(2041)的一侧面靠近顶端处通过万向铰(7)和工型块(2042)连接,所述u型块(2041)的一侧面固定连接有固定块,所述固定块与定位杆(6)转动连接。
6.根据权利要求5所述的一种三轴移动式双船浮托运动补偿方法,其特征在于:所述u型块(2041)和工型块(2042)组成承接件(204),所述承接件(204)的顶端放置有上部组块。
7.根据权利要求1所述的一种三轴移动式双船浮托运动补偿方法,其特征在于:所述连接件(203)呈三角形状,所述连接件(203)的四个拐角均开设有转向孔。
技术总结
本发明公开了一种三轴移动式双船浮托运动补偿方法,属于海洋工程技术领域,包括如下步骤:S1、调节支撑臂主体伸缩长度,S2、调节双体船重心,S3、纵荡运动补偿,S4、横荡运动补偿,S5、调节承接件的高度;导轨设置在双体船的甲板上,支撑臂的底端设置有滑轮,配重舱通过卡扣安装在支撑臂主体的顶端,卡扣的底端开设有梯形槽,梯形槽与导轨滑动连接,支撑臂主体的一端对称开设有开口,开口的底端开设有球窝,支撑臂主体的顶端固定连接有定位杆。本发明在双体船甲板安装支撑臂,可以对双体船的横荡、纵荡和横摇等运动进行主动补偿,克服了无法对运动补偿过程进行人为干预的弊端,并且此方法与传统的被动补偿相比扩大了双体船运动补偿的范围。
技术研发人员:常宗瑜,周志鹏,郑中强,王海波,赵林
受保护的技术使用者:中国海洋大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!