一种智能化观光无人船的制作方法
本发明涉及观光无人船,主要应用于休闲旅游领域,如景区水域观光、私人水上娱乐观光,具体为一种智能化观光无人船。
背景技术:
1、现有水上观光娱乐船主要使用传统有人驾驶观光船,一般需要配备专业的驾驶员及安全人员进行运营,运营成本高昂,观光功能单一,无法给用户提供私密的观光游览空间,运营安全主要依赖于运营人员的安全责任意识及安全管理措施执行力度,整体上观光体验差,无法提高用户旅游观光体验,这样使得产品的投入成本及运营成本大大提高,为此,我们提出一种智能化观光无人船。
技术实现思路
1、本发明的目的在于提供一种智能化观光无人船,以解决传统游人观光无人船运营效率低下、安全性不高的问题。
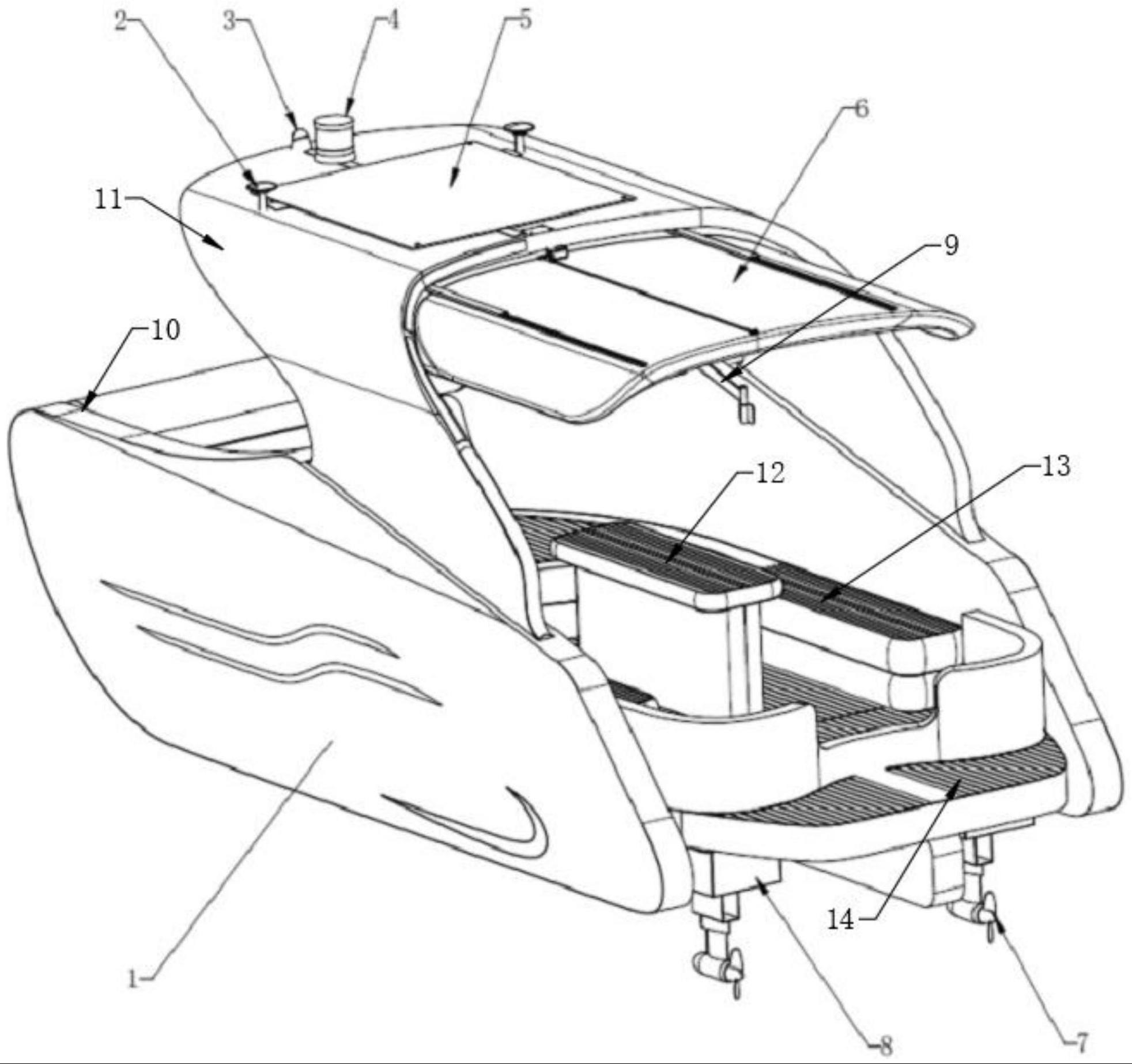
2、为实现上述目的,本发明提供如下技术方案:一种智能化观光无人船,包括船体,所述船体的顶部固定装配有船棚,所述船体上安装有电力系统,所述船棚的顶部安装有导航系统,所述导航系统的前方设置有固定在船棚顶部的视觉系统,所述导航系统和视觉系统之间设置有避障雷达,所述船棚的顶部固定装配有太阳能板,所述船棚内滑动装配有自动遮阳棚,所述船体的底部后侧固定装配有主控系统,所述主控系统输出端固定装配有动力系统,所述船棚的内侧侧壁上通过支架安装有人机交互系统,所述船体的顶部固定有设置在自动遮阳棚下方的置物桌,所述置物桌的左右两侧均设置有固定在船体上的观光凳,所述船体的后端一体成型设置有甲板。
3、优选的,所述船体上安装有和主控系统电性连接的控制面板,所述主控系统电性输出连接电力系统、导航系统、视觉系统、避障雷达、太阳能板、自动遮阳棚、动力系统和人机交互系统,且所述导航系统、视觉系统、避障雷达形成无人船的感知系统。
4、优选的,所述导航系统内置毫米波雷达装置,主要用于探测中长距离障碍物信息,经过主控系统处理后输出障碍物距离及速度信息,供主控系统高级辅助驾驶决策用。
5、优选的,所述视觉系统主要用于探测短距离障碍物信息,由于视觉系统受环境光影响较大,其作为毫米波雷达装置的辅助检测手段,提供近距离障碍物更多的纹理、形状和分类等信息,以供主控系统高级辅助驾驶决策用。
6、优选的,所述避障雷达包括激光雷达装置,主要用于探测中短距离障碍物信息,经过主控系统处理后输出障碍物距离及轮廓数据,供主控系统高级辅助驾驶决策用。
7、优选的,所述太阳能板通过光电转换器和电力系统连接,所述电力系统内置为无人船提供电力供给的蓄电池。
8、优选的,所述动力系统由大功率伺服电机、伺服驱动器和水冷系统构成,用于接收主控系统的指令并带动叶轮旋转,从而驱动无人船前进和后退。
9、优选的,所述人机交互系统包括动力开关、仪表和一个高分辨率触摸显示屏;仪表用于实时显示驱动伺服电机的转速和温度等状态;触摸显示屏用于用户进行参数配置和无人船的状态显示。
10、与现有技术相比,本发明的有益效果是:
11、该发明结构设计合理,无人船由便携式充气的船体和分布于船体上的智能化航行控制系统组成,智能化航行控制系统包括动力系统、电力系统、感知系统、主控系统、人机交互系统,动力系统和主控系统布置于船体上的甲板内部,电力系统布置于船体两侧中部,感知系统布置于船棚顶部,人机交互系统负责实时展示无人船的装置运行状态、障碍物信息、声光报警及运行时参数的设置和动作执行,这样用户上船后,通过人机交互系统进行购票及游览路线选择,无人船上的主控系统控制无人船自动离岸,并按照预设航线及固定航速航行,无人船航行过程中利用导航系统、视觉系统和避障雷达实时感知周边态势,并根据地图信息生成融合态势,根据态势自主航行及避障,远程交互系统配置安全员实时监控船只运行情况,包括摄像头传回的实时画面信息、融合后的船周边态势信息、无人船各项状态信息等,正常情况下,游览路线或游览时间到达后,无人船会按照最优路劲及时自主返航并自动停靠码头,当遇到通信故障或剩余能源不足时,会实时报警,同时无人船可按照提前设置的策略自动停车或按照最优路劲及时自主返航,这样利用智能化技术将观光船智能化无人化,提升用户旅游观光体验,同时智能化技术极大提高安全等级,另外使用最新的充气工艺船体结合智能航行及运营系统,大大降低产品的投入成本及运营成本,将船舶的能源供给更加绿色、环保,提供的自动驾驶功能,将先进的自动驾驶技术引入船舶领域,为内河和近海的货运作业、观光旅游船行业带来更加智能、高效、环保、便利的作业环境,降低更多的劳动强度,带来更大的社会效益和经济效益。
技术特征:
1.一种智能化观光无人船,包括船体(10),所述船体(10)的顶部固定装配有船棚(11),其特征在于:所述船体(10)上安装有电力系统(1),所述船棚(11)的顶部安装有导航系统(2),所述导航系统(2)的前方设置有固定在船棚(11)顶部的视觉系统(3),所述导航系统(2)和视觉系统(3)之间设置有避障雷达(4),所述船棚(11)的顶部固定装配有太阳能板(5),所述船棚(11)内滑动装配有自动遮阳棚(6),所述船体(10)的底部后侧固定装配有主控系统(8),所述主控系统(8)输出端固定装配有动力系统(7),所述船棚(11)的内侧侧壁上通过支架安装有人机交互系统(9),所述船体(10)的顶部固定有设置在自动遮阳棚(6)下方的置物桌(12),所述置物桌(12)的左右两侧均设置有固定在船体(10)上的观光凳(13),所述船体(10)的后端一体成型设置有甲板(14)。
2.根据权利要求1所述的一种智能化观光无人船,其特征在于:所述船体(10)上安装有和主控系统(8)电性连接的控制面板,所述主控系统(8)电性输出连接电力系统(1)、导航系统(2)、视觉系统(3)、避障雷达(4)、太阳能板(5)、自动遮阳棚(6)、动力系统(7)和人机交互系统(9),且所述导航系统(2)、视觉系统(3)、避障雷达(4)形成无人船的感知系统。
3.根据权利要求2所述的一种智能化观光无人船,其特征在于:所述导航系统(2)内置毫米波雷达装置,主要用于探测中长距离障碍物信息,经过主控系统(8)处理后输出障碍物距离及速度信息,供主控系统(8)高级辅助驾驶决策用。
4.根据权利要求2所述的一种智能化观光无人船,其特征在于:所述视觉系统(3)主要用于探测短距离障碍物信息,由于视觉系统(3)受环境光影响较大,其作为毫米波雷达装置的辅助检测手段,提供近距离障碍物更多的纹理、形状和分类等信息,以供主控系统(8)高级辅助驾驶决策用。
5.根据权利要求2所述的一种智能化观光无人船,其特征在于:所述避障雷达(4)包括激光雷达装置,主要用于探测中短距离障碍物信息,经过主控系统(8)处理后输出障碍物距离及轮廓数据,供主控系统(8)高级辅助驾驶决策用。
6.根据权利要求1所述的一种智能化观光无人船,其特征在于:所述太阳能板(5)通过光电转换器和电力系统(1)连接,所述电力系统(1)内置为无人船提供电力供给的蓄电池。
7.根据权利要求1所述的一种智能化观光无人船,其特征在于:所述动力系统(7)由大功率伺服电机、伺服驱动器和水冷系统构成,用于接收主控系统(8)的指令并带动叶轮旋转,从而驱动无人船前进和后退。
8.根据权利要求1所述的一种智能化观光无人船,其特征在于:所述人机交互系统(9)包括动力开关、仪表和一个高分辨率触摸显示屏;仪表用于实时显示驱动伺服电机的转速和温度等状态;触摸显示屏用于用户进行参数配置和无人船的状态显示。
技术总结
本发明公开了观光无人船技术领域的一种智能化观光无人船,所述船体上安装有电力系统,所述船棚的顶部安装有导航系统,所述导航系统的前方设置有固定在船棚顶部的视觉系统,所述导航系统和视觉系统之间设置有避障雷达,所述船棚的顶部固定装配有太阳能板,所述船棚内滑动装配有自动遮阳棚,所述船体的底部后侧固定装配有主控系统,所述主控系统输出端固定装配有动力系统,所述船棚的内侧侧壁上通过支架安装有人机交互系统,利用智能化技术将观光船智能化无人化,提升用户旅游观光体验,同时智能化技术极大提高安全等级,另外使用最新的充气工艺船体结合智能航行及运营系统,大大降低产品的投入成本及运营成本。
技术研发人员:麦浩平,屈定真,冯进文
受保护的技术使用者:广州市番高领航科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!