基于防波堤结构变位的水下探测机器人装置
本发明属于勘测,尤其涉及基于防波堤结构变位的水下探测机器人装置。
背景技术:
1、现阶段,我国人工岛(或岛礁)护岸结构已经成为我国岛礁建设发展的重点,但由于其地基承载性能不高以及波浪作用下地基冲刷严重,严重威胁人工岛工程结构的安全,因此需实时对护岸及防波堤结构变位监控;目前,多采用水下机器人进行探测;
2、如中国专利公开了一种水下结构物表面缺陷探测机器人系统(申请号:201910520533.5),包括水下机器人探测单元、电缆装置单元和定位基阵单元,水下机器人探测单元包括框架,框架前部固定有双目摄像头,后部固定有六自由度推进器,框架上部固定有定位模块和控制模块,框架中部固定有电池仓,电缆装置单元与控制模块之间通过电缆相连,电缆装置单元内设置有有线网卡模块;定位基阵单元下部设置有多个水听器,定位基阵单元内部设置有仓体,仓体设置有信号处理模块和光纤模块。本发明还公开了对应的工作方法。解决了水下结构物表面缺陷探测机器人系统及其工作方法,能够实时、远程地采集和分析水下结构物表面缺陷图像;
3、但在实际使用过程中,其移动不便,不利于多位点的探测工作,且单一通过图像的采集方法,不能很好的辨别护岸是否发生变位异常情况。
技术实现思路
1、针对现有技术的不足,本发明提供了基于防波堤结构变位的水下探测机器人装置,解决了上述问题。
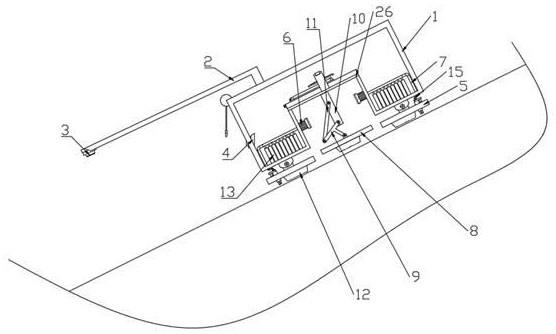
2、为实现以上目的,本发明通过以下技术方案予以实现:基于防波堤结构变位的水下探测机器人装置,包括:
3、架体,用于部件承载支撑;
4、步进机构,与架体连接,用于驱动架体进行等距行走;
5、测距组件,与架体连接,用于测量架体步进前后距离护岸的高度变化;以及
6、转化机构,与架体连接,用于直观检测护岸不同结构位置点的状态;
7、其中,所述转化机构包括支撑板、安装盘、活动条、激光发射器以及激光接收器,所述支撑板与架体固定连接,所述安装盘与支撑板转动连接,所述活动条与固定连接在支撑板上的支撑架滑动配合,所述激光发射器安装在活动条上,若干个所述激光接收器与嵌入安装盘内的第三动力伸缩杆对应安装,还包括:
8、传动组件,与支撑板连接,用于驱动安装盘以及活动条进行同步运动。
9、在上述技术方案的基础上,本发明还提供以下可选技术方案:
10、进一步的技术方案:所述传动组件包括第二动力伸缩杆、传动板、传动条以及传动块,所述第二动力伸缩杆与传动板连接,所述传动板与固定连接在支撑板上的安装框滑动配合,所述第二动力伸缩杆上转动连接有与开设在传动条上的滑槽滑动配合的滑块,所述传动块与传动条滑动配合且与固定连接在活动条上的连接杆转动连接,所述传动板上固定连接有与固定连接在安装盘上的齿轮相啮合的齿条,还包括:
11、驱动部,与安装框连接,用于驱动传动板进行线性运动。
12、进一步的技术方案:所述测距组件包括悬挂绳、距离传感器以及第三摄像头,若干个所述悬挂绳对称设置在架体上,所述距离传感器与若干个悬挂绳中位于中部的悬挂绳固定连接,所述第三摄像头设置在架体上。
13、进一步的技术方案:连接有距离传感器的悬挂绳的两侧的悬挂绳的端部设置有激光发射探头,所述架体上设置有投射板以及第二摄像头,所述投射板设置在架体两侧,所述第二摄像头设置在架体侧壁中部。
14、进一步的技术方案:所述步进组件包括第一行走板、第二行走板、连接架、竖杆、传动伸缩杆以及第一电机,所述第一行走板以及两个第二行走板均通过安装件与架体转动连接,所述连接架为t形结构且其与竖杆转动连接,所述传动伸缩杆转动连接在竖杆的中部,所述第一电机通过螺栓组件d与竖杆拆卸连接,所述第一电机输出轴与连接架固定连接,所述第二行走板与连接架转动连接。
15、进一步的技术方案:所述第一行走板上设置有用于对架体停留时进行稳固的抓地组件,所述抓地组件包括第一动力伸缩杆、活动板以及抓地钉,所述抓地钉与活动板固定连接,所述第一动力伸缩杆与活动板以及第一行走板固定连接,所述活动板与第一行走板滑动配合。
16、进一步的技术方案:所述架体上设置有用于对土壤成分进行提取的采集组件,所述采集组件包括抽吸泵、安装管、容纳管、电磁阀、导管以及采集管,所述安装管以及容纳管均与架体拆卸连接,所述容纳管与安装管内部连通,所述电磁阀设置在采集管内部,所述采集管贯穿嵌入设置在活动板中部,所述采集管通过导管与安装管连通,所述抽吸泵安装在架体上且其抽吸部与采集管贯通,所述采集管上设置有插入套。
17、进一步的技术方案:所述驱动部包括第二电机以及螺杆,所述螺杆通过联轴器与第二电机输出轴连接,所述第二电机与安装框通过螺栓组件c与安装框拆卸连接,所述螺杆与安装框转动连接,所述螺杆与传动板螺纹连接。
18、进一步的技术方案:两个所述投射板之间设置有照明灯板,所述投射板端部设置有第一摄像头。
19、进一步的技术方案:所述第一行走板以及第二行走板上均设置有用于对装置进行吸附固定的吸盘,位于所述第一行走板上的吸盘与设置在第二行走板上的第二接触开关电性连接,位于所述第二行走板上的吸盘与设置在第一行走板上的第一接触开关电性连接。
20、有益效果
21、本发明提供了基于防波堤结构变位的水下探测机器人装置,与现有技术相比具备以下有益效果:
22、本发明通过步进组件,实现架体沿护岸的斜面等距行走,即等距测量护岸结构的不同位点,配合测距组件并结合转化机构的作用,使得激光接收器在安装盘上呈螺旋分布,即对应首次位点的测量值,二次测量后,若对应的位点发生变化,即对应位置点的激光发射器与激光接收器无法对接,即可及时判断位点的异常变化,该过程,不仅实现了水下护岸结构多位点的等距测量,且能够直观地判断出异常位点的状态;
23、步进组件与吸盘的配合,使得在第二行走板与两个第一行走板交替运行过程中,通过架体底部增加吸盘吸附作用,可提高架体在护岸测量过程中的稳定性,避免因水浪造成的测量误差;
24、当判断位点异常时,采集组件中的抽吸泵工作,打开位于靠近抽吸泵的首个容纳管所在的电磁阀,此时在抽吸泵的抽吸作用下,该位点的水土混合物便通过插入套进入采集管并在安装管的连通作用下,进入首个容纳管进行留存,当收集一定量该位点的样品后,关闭抽吸泵,失去抽吸泵的抽吸作用,在安装管的自身作用下,水土混合物回流排出,并同时关闭采集后首个容纳管所在的电磁阀,当需要下个采集时,即打开位于第二个容纳管所在的电磁阀,依次下去,即完成多个异常位点的水土混合物分类采集,便于后续进一步分析研究。
技术特征:
1. 基于防波堤结构变位的水下探测机器人装置,包括用于部件承载支撑的架体以及与架体连接用于驱动架体进行行走的步进机构,其特征在于,还包括:
2.根据权利要求1所述的基于防波堤结构变位的水下探测机器人装置,其特征在于,所述传动组件包括第二动力伸缩杆、传动板、传动条以及传动块,所述第二动力伸缩杆与传动板连接,所述传动板与固定连接在支撑板上的安装框滑动配合,所述第二动力伸缩杆上转动连接有与开设在传动条上的滑槽滑动配合的滑块,所述传动块与传动条滑动配合且与固定连接在活动条上的连接杆转动连接,所述传动板上固定连接有与固定连接在安装盘上的齿轮相啮合的齿条,还包括:
3.根据权利要求1所述的基于防波堤结构变位的水下探测机器人装置,其特征在于,所述测距组件包括悬挂绳、距离传感器以及第三摄像头,若干个所述悬挂绳对称设置在架体上,所述距离传感器与若干个悬挂绳中位于中部的悬挂绳固定连接,所述第三摄像头设置在架体上。
4.根据权利要求3所述的基于防波堤结构变位的水下探测机器人装置,其特征在于,连接有距离传感器的悬挂绳的两侧的悬挂绳的端部设置有激光发射探头,所述架体上设置有投射板以及第二摄像头,所述投射板设置在架体两侧,所述第二摄像头设置在架体侧壁中部。
5.根据权利要求1所述的基于防波堤结构变位的水下探测机器人装置,其特征在于,所述步进组件包括第一行走板、第二行走板、连接架、竖杆、传动伸缩杆以及第一电机,所述第一行走板以及两个第二行走板均通过安装件与架体转动连接,所述连接架为t形结构且其与竖杆转动连接,所述传动伸缩杆转动连接在竖杆的中部,所述第一电机通过螺栓组件d与竖杆拆卸连接,所述第一电机输出轴与连接架固定连接,所述第二行走板与连接架转动连接。
6.根据权利要求5所述的基于防波堤结构变位的水下探测机器人装置,其特征在于,所述第一行走板上设置有用于对架体停留时进行稳固的抓地组件,所述抓地组件包括第一动力伸缩杆、活动板以及抓地钉,所述抓地钉与活动板固定连接,所述第一动力伸缩杆与活动板以及第一行走板固定连接,所述活动板与第一行走板滑动配合。
7.根据权利要求1所述的基于防波堤结构变位的水下探测机器人装置,其特征在于,所述架体上设置有用于对土壤成分进行提取的采集组件,所述采集组件包括抽吸泵、安装管、容纳管、电磁阀、导管以及采集管,所述安装管以及容纳管均与架体拆卸连接,所述容纳管与安装管内部连通,所述电磁阀设置在采集管内部,所述采集管贯穿嵌入设置在活动板中部,所述采集管通过导管与安装管连通,所述抽吸泵安装在架体上且其抽吸部与采集管贯通,所述采集管上设置有插入套。
8.根据权利要求2所述的基于防波堤结构变位的水下探测机器人装置,其特征在于,所述驱动部包括第二电机以及螺杆,所述螺杆通过联轴器与第二电机输出轴连接,所述第二电机与安装框通过螺栓组件c与安装框拆卸连接,所述螺杆与安装框转动连接,所述螺杆与传动板螺纹连接。
9.根据权利要求4所述的基于防波堤结构变位的水下探测机器人装置,其特征在于,两个所述投射板之间设置有照明灯板,所述投射板端部设置有第一摄像头。
10.根据权利要求5或6所述的基于防波堤结构变位的水下探测机器人装置,其特征在于,所述第一行走板以及第二行走板上均设置有用于对装置进行吸附固定的吸盘,位于所述第一行走板上的吸盘与设置在第二行走板上的第二接触开关电性连接,位于所述第二行走板上的吸盘与设置在第一行走板上的第一接触开关电性连接。
技术总结
本发明公开了基于防波堤结构变位的水下探测机器人装置,包括:架体;步进机构,与架体连接,用于驱动架体进行行走;测距组件,与架体连接,用于测量架体步进前后距离护岸的高度变化;以及转化机构,与架体连接,用于直观检测护岸不同结构位置点的状态;其中,所述转化机构包括支撑板、安装盘、活动条、激光发射器以及激光接收器,还包括:传动组件,与支撑板连接,用于驱动安装盘以及活动条进行同步运动;本发明通过设置的步进组件,可实现架体沿护岸的斜面等距行走,即可等距测量护岸结构的不同位点,配合测距组件的作用,并结合转化机构的作用,实现了水下护岸结构多位点的等距测量,且能够直观的判断出异常位点的状态。
技术研发人员:魏来,刘鑫鑫,张育刚,韦中,丁宇,韦锦宇,陈靖,史奕楠,杨淋玉,马梓高,王志颖
受保护的技术使用者:南京信息工程大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!