一种仿生波动推进装置以及波动控制方法
本申请涉及机器人,更具体地说,尤其涉及一种仿生波动推进装置以及波动控制方法。
背景技术:
1、随着科技经济水平的发展,人类对海洋的探索需求不断增加。水下机器人可替代人类进行各类水下作业,因此具有广阔的应用前景和巨大的发展潜力。例如,在民用领域,水下机器人可以执行生物观察、水质检测、垃圾回收、水底救援、矿产勘查等经济任务;在军事领域,水下机器人可以执行自主侦察、水雷爆破、鱼雷检测等多种作战任务。传统的水下推进方式主要有螺旋桨式和喷射式,其缺陷是噪音大、环境扰动大,尤其是螺旋桨高速旋转时容易缠绕水草、沙石等异物从而导致损坏,而低速时其控制性和稳定性不好。
2、为了解决上述问题,结合自然界生物对环境的适应能力,设计出了仿生波动鳍推进装置,现有技术中的仿生波动鳍推进装置是将波动鳍的运动简化为单个维度的波动,通过控制波动鳍上不同位置的夹持点进行上下摆动,即可形成前后传递的正弦波,目前的仿生波动鳍推进装置只设置了夹条的上下摆动,单个夹条只有一个自由度,无法控制生成更加复杂的波形。
3、因此,亟需一种仿生波动推进装置以及控制方法,能够带动波动鳍生成更加复杂的波形,以使得波动鳍能够产生更加复杂的动作,以应对更加多样的环境。
技术实现思路
1、为解决上述技术问题,本申请提供一种仿生波动推进装置以及控制方法,能够带动波动鳍生成更加复杂的波形,以使得波动鳍能够产生更加复杂的动作,以应对更加多样的环境。
2、本申请提供的技术方案如下:
3、一种仿生波动推进装置,包括:
4、本体;
5、间隔设置在所述本体上的驱动组件,所述驱动组件包括第一驱动件,与第一驱动件的驱动端相连的摆动架,所述摆动架上设置有第二驱动件,所述第二驱动件的驱动端与摆盘相连;
6、与所述摆盘之间通过转动组件活动连接的夹条,所述夹条远离所述摆盘的一端与波动鳍相连。
7、优选地,所述摆动架的回转轴线与所述摆盘的回转轴线相交,且所述摆动架的回转轴线与所述第二驱动件的驱动端的摆动平面共面。
8、优选地,所述转动组件,包括:
9、与所述摆动架远离所述第二驱动件的一端相连的转动座;
10、与所述转动座之间可转动连接的第一转轴,所述第一转轴与所述夹条相连。
11、优选地,所述夹条具体由弹簧钢材料制成。
12、优选地,所述摆动架,包括:
13、与所述第一驱动件的驱动端相连的第一支撑板;
14、与所述第一支撑板远离所述第一驱动件的一端的第二支撑板,所述第二支撑板上设置有用于安装所述第二驱动件的安装槽,所述第二驱动件固定设置在所述第二支撑板上。
15、优选地,所述摆动架,还包括:
16、与所述第二支撑板远离所述第一支撑板的一端相连的第三支撑板,所述第三支撑板上固定设置有第二转轴,所述第二转轴通过轴承组件与本体连接,所述第二转轴的轴线方向与所述第一驱动件的轴线方向重合。
17、优选地,还包括:
18、设置在所述本体的顶部的密封舱,所述密封舱的两侧设置有通孔;
19、设置在所述通孔内,与所述通孔密封连接的穿线螺丝,所述穿线螺丝上设置有过线孔;
20、与所述密封舱的顶部密封连接的密封盖。
21、优选地,还包括:
22、固定设置在所述本体的顶部的力传感器;
23、与所述力传感器固定连接的测量平台。
24、一种波动控制方法,用于上述任一项所述的仿生波动推进装置中,其特征在于,包括以下步骤:
25、s1、预设横向波动方程、纵向波动方程、波动参数、时间值以及控制周期;
26、s2、根据所述时间值、所述横向波动方程、所述纵向波动方程以及所述控制周期,获取横波输出角度以及纵波输出角度;
27、s3、根据所述横波输出角度生成第一pwm值,并输出第一pwm值控制第二驱动件的驱动端转动横波输出角度,根据所述纵波输出角度生成第二pwm值,并输出第二pwm值控制第一驱动件的驱动端转动纵波输出角度。
28、优选地,在步骤s1和步骤s2之间还包括以下步骤:
29、迭代次数初始化为零,时间值等于控制周期与迭代次数的乘积。
30、优选地,在步骤3之后还包括以下步骤:
31、s4、等待一个控制周期之后,更新迭代次数以及时间值,返回步骤s2进行循环。
32、优选地,所述波动参数,包括:横向波动频率、横向波动幅值、纵向波动频率、纵向波动幅值以及偏置角度,其中,
33、当所述偏置角度等于0时,波动鳍的波动平衡位置位于本体中心面上,驱动所述本体直线行驶;
34、当所述偏置角度大于0时,所述波动鳍的波动平衡位置位于所述本体中心面的左侧,所述波动鳍具有向右偏航力矩,驱动所述本体向右转弯;
35、当所述偏置角度小于0时,所述波动鳍的波动平衡位置位于所述本体中心面的右侧,所述波动鳍具有向左偏航力矩,驱动所述本体向左转弯。
36、优选地,所述横向波动方程和所述纵向波动方程为正弦波动方程。
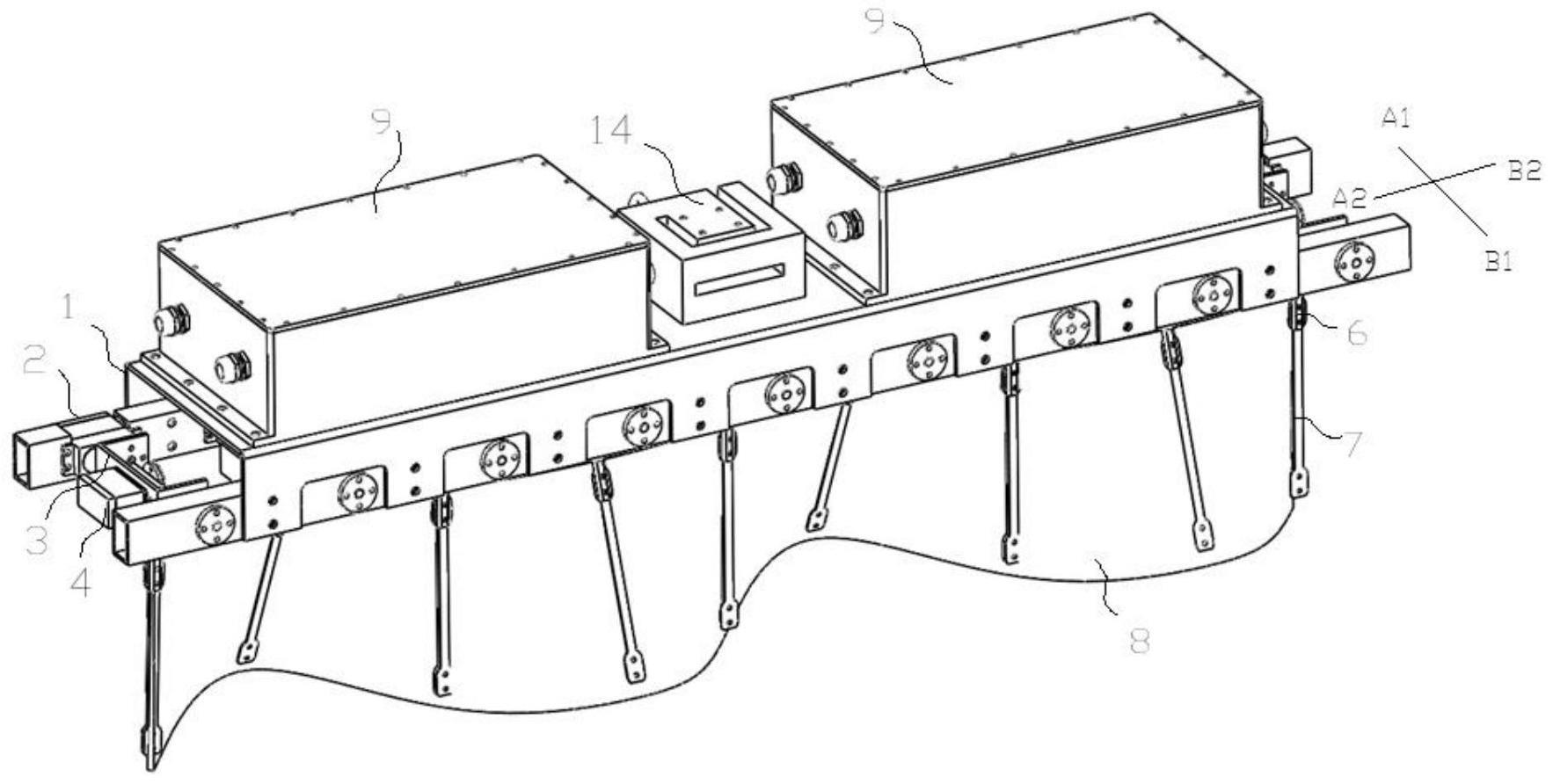
37、本发明提供的仿生波动推进装置,首先由于设置有本体、驱动组件以及夹条,其中,驱动组件间隔设置在本体上,驱动组件包括第一驱动件、摆动架、第二驱动件以及摆盘,其中,第一驱动件的驱动端与摆动架相连,带动摆动架绕第一驱动件的驱动端转动,在摆动架上设置有第二驱动件,第一驱动件带动摆动架转动的同时也带动第二驱动件转动,第二驱动件的驱动端与摆盘相连,带动摆盘绕第二驱动件的驱动端转动,摆盘在绕第二驱动件的输出摆动的同时,受第一驱动件的驱动,摆盘随摆动架绕第一驱动件的驱动端摆动,摆盘与夹条相连,夹条远离摆盘的一端与波动鳍相连,由此,波动鳍在波动的过程是由第二驱动件驱动产生的横向波动和第一驱动件产生的纵向波动生成的复合波形,为了使夹条能够适应波动鳍的鳍面的切线变化,保证波动鳍波形的完整度,夹条与摆盘之间通过转动组件活动连接,将夹条设置为可旋转的方式,波动鳍在波动的过程中,夹条可以自适应转动,保证产生的复合波的波形的完整性。由此可见,与现有技术相比,本发明实施例中的仿生波动推进装置,每根夹条都具有两个主动的摆动自由度以及一个自适应的旋转自由度,能够控制波动鳍生成纵横复合波波形,以使得波动鳍能够产生更加复杂的动作,以应对更加多样的环境。
38、本技术方案还提供了一种用于上述仿生波推进装置的控制方法,同样也能够实现上述技术效果。
技术特征:
1.一种仿生波动推进装置,其特征在于,包括:
2.根据权利要求1所述的仿生波动推进装置,其特征在于,
3.根据权利要求2所述的仿生波动推进装置,其特征在于,
4.根据权利要求3所述的仿生波动推进装置,其特征在于,
5.根据权利要求1至4中任一项所述的仿生波动推进装置,其特征在于,
6.根据权利要求5所述的仿生波动推进装置,其特征在于,
7.根据权利要求1所述的仿生波动推进装置,其特征在于,
8.根据权利要求1所述的仿生波动推进装置,其特征在于,
9.一种波动控制方法,用于权利要求1至8中任一项所述的仿生波动推进装置中,其特征在于,包括以下步骤:
10.根据权利要求9所述的波动控制方法,其特征在于,
11.根据权利要求10所述的波动控制方法,其特征在于,
12.根据权利要9求所述的波动控制方法,其特征在于,
技术总结
本申请公开一种仿生波动推进装置以及波动控制方法,包括:本体;间隔设置在所述本体上的驱动组件,所述驱动组件包括第一驱动件,与第一驱动件的驱动端相连的摆动架,所述摆动架上设置有第二驱动件,所述第二驱动件的输出端与摆盘相连,所述摆动架的回转轴线与所述摆盘的回转轴线相交;与所述摆盘之间通过转动组件活动连接的夹条,所述夹条远离所述摆盘的一端与波动鳍相连。本申请提供的仿生波动推进装置以及波动控制方法,相较于现有技术而言,能够带动波动鳍生成更加复杂的波形,以使得波动鳍能够产生更加复杂的动作,以应对更加多样的环境。
技术研发人员:尚建忠,罗自荣,夏明海,殷谦,白向娟,蒋涛,卢忠岳,朱一鸣,徐毓泽,朱群为
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!