一种船体清理机构的制作方法
本发明涉及机械设备领域,更具体地,涉及一种船体清理机构。
背景技术:
1、大型船舶的水下船体会被海洋生物附着,轻度附着会增加航行油耗15%-20%,重度附着油耗会增加2-3倍,因此,船体附着物的清理作业属于船舶必要的常规保养。
2、船体壁面的海洋附着物以贝类尤其是藤壶等为主,具有附着力强,附着层坚硬,附着形状复杂等特性。传统的清理多为人工持械清理或采用遥控机器人操作,常用清理方式为接触式或射流式,其中接触式为:机器人安装旋转刷头清理附着物。对海洋附着物清理综合效果一般。主要表现在:a.清理过程容易损坏壁面涂层;b.附着情况复杂,清理效果和效率难以保障。射流式:射流式分为水射流和喷砂(丸)。a,水射流为广泛使用的清洗方式:对壁面损伤小,细微面清洗效果较好,是目前应用广泛的一种清理方式。但由于壁面的附着物情况复杂和附着层对射流具有分流减压作用,尤其水下使用,降压明显,导致清理效果和作业效率低。b,喷砂(丸)用在船坞内作业,多用于船舶的外表面在修复和涂装前表面处理。难已实现使用清理机器人进行智能型自动化标准作业。
3、因此,需要一种新型的船体清理机构,能够解决上述问题。
技术实现思路
1、船体壁面的海洋附着物以贝类尤其是藤壶等为主,具有附着力强,附着层坚硬,附着形状复杂等特性,为清理作业造成困难。针附着层特性,如何快速有效的清理附着层是清理作业的关键步骤。本发明的一个目的是提供一种快速清理船体海洋生物附着物的新技术方案。能够在不损伤壁面涂层的情况下快速高效的清理掉附着层,并且清理后达到效果一致,能够为实现清理机器人自动化标准作业提供切实可行的必要条件。
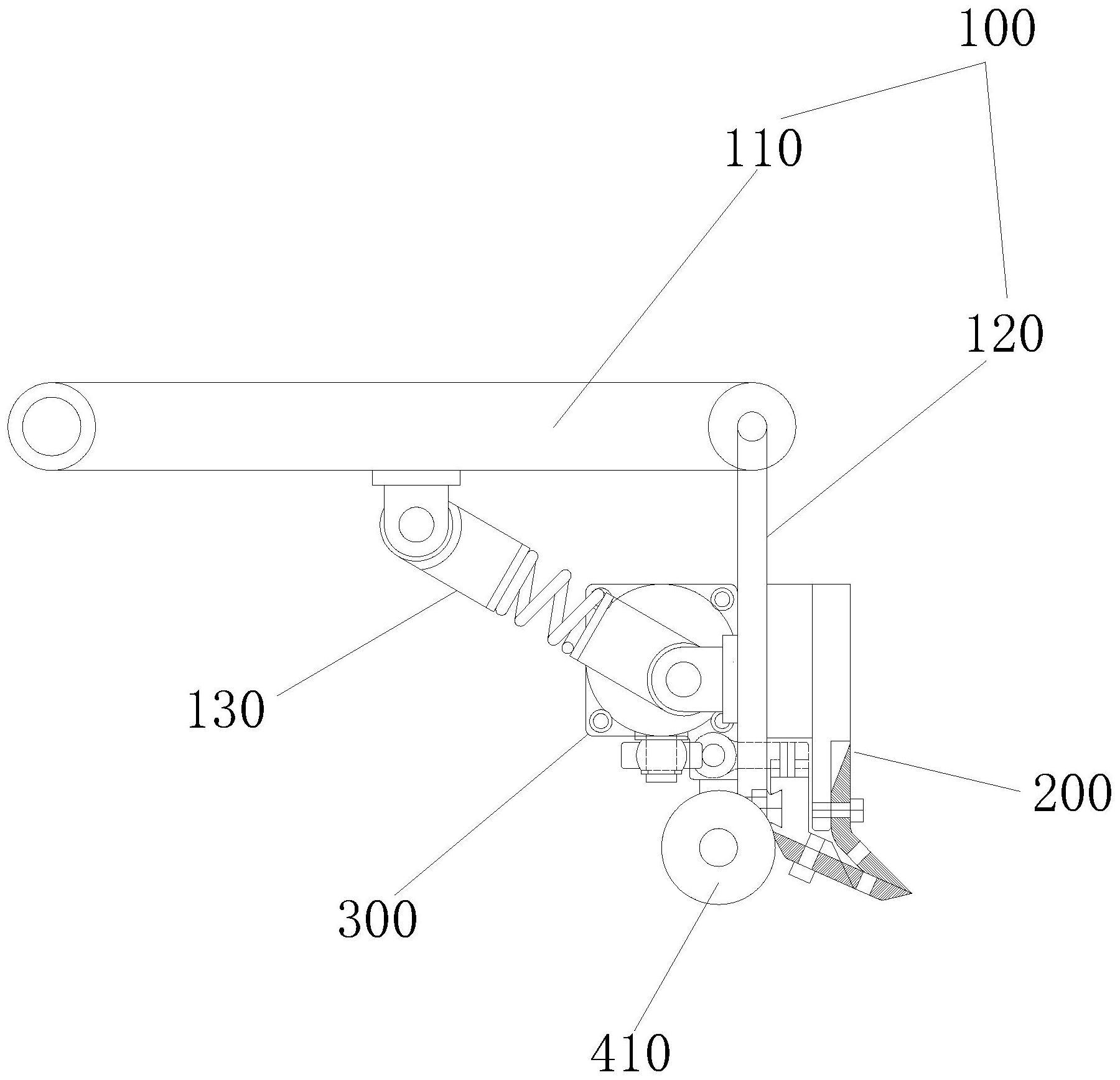
2、根据本发明的第一方面,提供了一种船体清理机构,包括安装架,所述安装架上安装有剪切器以及驱动装置,所述剪切器安装至所述安装架前端的底部并与船体表面呈锐角布置,用于贴近船体表面剪切清理船体附着物,所述驱动装置驱动所述剪切器做剪切运动。
3、通过本方案,利用剪切器贴近船体表面,对附着物从根部进行剪切清除,不仅能够保护船体表面涂层,而且不受船体表面附着物的种类和厚度影响,剪切后平整一致;相较于射流式清理方式,清理效率更高,而且不会对环境造成污染。
4、优选地,所述安装架底部设置有滚轮,所述滚轮设置于所述剪切器的两侧,用于支撑和保障剪切刃口与壁面的安全距离。
5、优选地,所述安装架包括横置的固定架以及垂直布置的活动板,所述活动板连接至所述安装架的前端,所述剪切器安装至所述活动板的底部,所述活动板与所述安装架之间安装有刀架减震器和压力传感器。
6、通过本方案,刀架减震器对固定板的位置进行限定,使剪切器保持相对稳定的角度,以完成剪切动作;在清理过程中隔绝或减小传递至后方机器人的震动,保护机器人稳定运行。
7、优选地,所述滚轮通过微调机构安装至所述活动板上,所述微调机构用于调整滚轮的支撑高度。
8、通过本方案,通过微调机构来调整滚轮的高度,最终实现对剪切器刃口与壁面距离调整,应对不同附着层剪切要求。
9、优选地,所述活动板上设置有定刀板和动刀板,所述剪切器包括相互配合的定刀和动刀,所述定刀固定至定刀板的定刀卡槽上,所述动刀连接至动刀板的动刀卡槽上并由所述驱动装置驱动做横向往复移动;所述定刀与所述动刀的刀刃部均为锯齿形结构。
10、通过本方案,在设备向前移动过程中,动刀横向移动时与定刀的刀刃形成剪切,将附着物根部切断,完成清理。
11、优选地,所述动刀板上设有横向滑槽,所述动刀板上设有滑槽,所述动刀板通过所述滑槽滑动装配在所述活动板上的滑轨上。
12、通过本方案,活动板滑轨不仅能够对动刀的运动方向起到导向作用,提高动刀移动的稳定性;同时对动刀板起到支撑作用,避免本装置前进过程中动刀受力过大而挤压驱动装置造成其损坏。
13、优选地,所述动刀以及所述定刀均为上下两侧开刃,所述动刀以及所述定刀分别通过螺栓安装在所述动刀板和所述定刀板上。
14、通过本方案,使动刀以及定刀在磨损过大时仅需要转换方向即可继续使用,大大降低了刀具更换成本。动刀和定刀为耗损件,均做标准化制造,可按作业要求更换。
15、优选地,所述微调机构包括微调安装架、调节滑块、调节螺栓以及固定螺母,所述微调安装架上设置有垂直布置的调节孔,所述调节滑块滑动连接至所述调节孔中,所述调节螺栓贯穿所述微调安装架并于所述调节滑块螺纹连接,所述固定螺母螺纹连接至所述调节螺栓上用于夹紧固定所述调节滑块;所述滚轮连接至所述调节滑块上,所述微调安装架安装至所述安装架上,所述微调安装架上设置有标尺。
16、通过本方案,对调节螺栓和固定螺母进行上下调整和固定,调整距离通过标尺刻度显示,最终实现对剪切器刃口与壁面距离调整,应对不同附着层剪切要求。
17、优选地,所述驱动装置包括伺服电机以及横动机构,所述横动机构包括横动辊、横动滑块以及横动滑轨,所述横动滑块滑动连接至所述横动滑轨上,所述横动辊上设置有椭圆形的环状槽,所述横动滑块沿所述环状槽滑动以进行左右横动,所述横动滑块与所述动刀连接。
18、通过本方案,横动辊的旋转使横动滑块在横动滑轨上横向左右移动,横动滑块带动动刀的左右移动,从而实现与定刀的剪切动作。
19、根据本发明的第二方面,提供了一种船体清理装置,使用上述船体清理机构。
20、根据本公开的一个实施例,采用本申请的船体清理机构,将剪切器倾斜深入附着物底部进行剪切清理,相较于钢刷旋转清理或射流式清理,不仅效率更高,不受船体附着物类型影响,而且不会损伤船体表面的涂层,也不会对周边环境造成污染;剪切后平整一致,为机器人运行提供标准平面,易于自动运行的控制。如有剪切异常,则通过减震器上压力传感器反馈操作系统作相关的运行调整。
21、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
技术特征:
1.一种船体清理机构,包括安装架,其特征在于,所述安装架上安装有剪切器以及驱动装置,所述剪切器安装至所述安装架前端的底部并与船体表面呈锐角布置,用于贴近船体表面剪切清理船体附着物,所述驱动装置驱动所述剪切器做剪切运动。
2.根据权利要求1所述的船体清理机构,其特征在于,所述安装架底部设置有滚轮,所述滚轮设置于所述剪切器的两侧,用于支撑和保障剪切刃口与壁面的安全距离。
3.根据权利要求2所述的船体清理机构,其特征在于,所述安装架包括横置的固定架以及垂直布置的活动板,所述活动板连接至所述安装架的前端,所述剪切器安装至所述活动板的底部,所述活动板与所述安装架之间安装有刀架减震器和压力传感器。
4.根据权利要求3所述的船体清理机构,其特征在于,所述滚轮通过微调机构安装至所述活动板上,所述微调机构用于调整滚轮的支撑高度。
5.根据权利要求3所述的船体清理机构,其特征在于,所述活动板上设置有定刀板和动刀板,所述剪切器包括相互配合的定刀和动刀,所述定刀固定至定刀板的定刀卡槽上,所述动刀连接至动刀板的动刀卡槽上并由所述驱动装置驱动做横向往复移动;所述定刀与所述动刀的刀刃部均为锯齿形结构。
6.根据权利要求5所述的船体清理机构,其特征在于,所述动刀板上设有滑槽,所述动刀板通过所述滑槽滑动装配在所述活动板上的滑轨上。
7.根据权利要求5所述的船体清理机构,其特征在于,所述动刀以及所述定刀均为上下两侧开刃,所述动刀以及所述定刀分别通过螺栓安装在所述动刀板和所述定刀板上。
8.根据权利要求3所述的船体清理机构,其特征在于,所述微调机构包括微调安装架、调节滑块、调节螺栓以及固定螺母,所述微调安装架上设置有垂直布置的调节孔,所述调节滑块滑动连接至所述调节孔中,所述调节螺栓贯穿所述微调安装架并于所述调节滑块螺纹连接,所述固定螺母螺纹连接至所述调节螺栓上用于夹紧固定所述调节滑块;所述滚轮连接至所述调节滑块上,所述微调安装架安装至所述安装架上,所述微调安装架上设置有标尺。
9.根据权利要求5所述的船体清理机构,其特征在于,所述驱动装置包括伺服电机以及横动机构,所述横动机构包括横动辊、横动滑块以及横动滑轨,所述横动滑块滑动连接至所述横动滑轨上,所述横动辊上设置有椭圆形的环状槽,所述横动滑块沿所述环状槽滑动以进行左右横动,所述横动滑块与所述动刀连接。
10.一种船体清理装置,其特征在于,使用权利要求1至9任一项所述的船体清理机构。
技术总结
本发明公开了一种船体清理机构,是针对清理船体附着的贝类海洋生物而设计的专用设备,是安装在智能清理机器人上实施自动化作业的重要装备。船体清理机构包括,安装架,所述安装架上安装有剪切器以及驱动装置,所述剪切器固定至所述安装架前端的底部并与船体表面呈锐角布置,用于贴近船体表面剪切清理船体附着物,所述驱动装置驱动所述剪切器做剪切运动,对附着物从根部进行剪切清除。具有清理速度快,耗能小,清理过程不计算附着层厚度,清理效果一致,保护壁面涂层等特点,相较于此类传统清理方式,清理效果显著,清理效率更高,能够为清理机器人运行提供标准作业面,有利于实现清理机器人的自动化作业。
技术研发人员:岳明
受保护的技术使用者:淄博蓝谷商贸有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!