一种水下机器人的制作方法
本发明涉及水下机器人,具体涉及一种水下机器人。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发水下的重要工具。水下机器人在水下进行检测工作时,其自带的摄影设备相当于机器人的眼睛,起到侦查,拍摄,监控水底情况,水下机器人可在高度危险环境、被污染环境以及零可见度的水域代替人工在水下长时间作业,水下机器人上一般配备声呐系统、摄像机、照明灯和机械臂等装置。
2、目前的水下机器人(以下简称rov)的框架,一般采用四块hdpe板,中间通过不锈钢直角连接件来进行连接,此种形式,结构刚度很低,在运动时,框架可看到明显的左右形变;其云台上搭载的摄像头、灯与声呐部件的线缆,沿着下方悬空,然后接入尾部的控制舱中,这样在云台俯仰转动时,三个设备的线缆会在空中不断运动,第一是限制了此种方案的云台运动角度,最多只有120-150度,再大会被线缆扯住;第二是此种方案需要更大扭矩的云台,因为运动中,需要克服线缆拉拽的阻力。
技术实现思路
1、为此,本发明实施例提供一种水下机器人,以解决上述技术存在的现有水下机器人框架不稳定,在运动时容易变形的问题。
2、为了实现上述目的,本发明实施例提供如下技术方案:
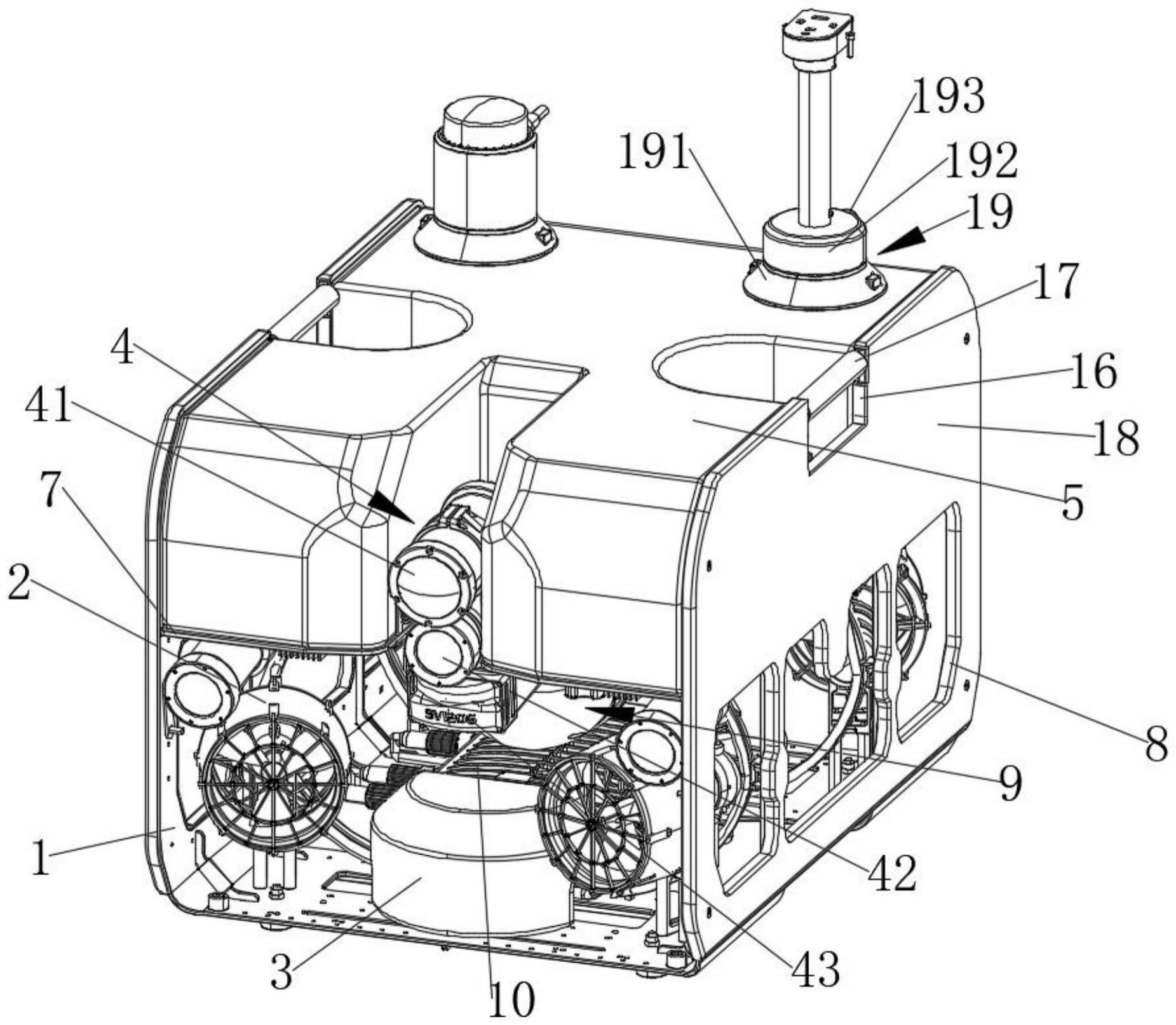
3、一种水下机器人,包括框架,以及设置于所述框架上的推进器、导流罩、云台,框架顶部连接浮材;
4、所述框架为u型的一体式框架;
5、所述框架两个侧壁相互靠近的一侧均设置有支撑组件;
6、所述框架的两个侧壁之间设置有支撑板,所述支撑板的两侧固定连接于两个侧壁的支撑组件上;
7、所述框架上与所述推进器对应的位置处设置有通孔,方便推进器过水。
8、可选地,所述云台包括摄像头、照明灯、声呐以及水下舵机;
9、所述摄像头通过固定件连接于照明灯的顶部,声呐固定于照明灯底部;
10、所述水下舵机固定于所述支撑板上;
11、所述固定件两端均转动连接于所述支撑板上,所述固定件一端固定连接于所述水下舵机的输出端;
12、摄像头连接有第一线缆,照明灯连接有第二线缆,第一线缆和第二线缆上间隔设置有近端固定座与远端固定座,近端固定座与远端固定座将第一线缆和第二线缆固定在一起,近端固定座连接于所述固定件一侧,并随固定件同轴转动,远端固定座固定于支撑板上;
13、远端固定座与支撑板连接点为点a,近端固定座与固定件的连接点为点b,点a与点b之间的距离小于第一线缆在ab之间的长度,同时点a与点b之间的距离小于第二线缆在ab之间的长度。
14、可选地,还包机器人控制舱和电源舱;
15、所述机器人控制舱内设置机器人的小电源管理板、控制板、通讯板,负责控制机器人,所述机器人控制舱内还设置有低压低电流的供电模块;
16、所述电源舱内设置机器人的电源模块、大电流推进器供电模块、照明灯供电模块,分别对机器人、推进器以及照明灯进行供电。
17、可选地,所述固定件一侧通过舵机轴承组与水下舵机连接,所述固定件另一端通过远端轴承组与支撑板连接;
18、远端轴承组内设置有套管与锁线罩,套管的一侧设置有管盖,所述第一线缆和第二线缆由远端固定座一端依次穿过近端固定座、管套以及管盖,管套与管盖固定连接。
19、可选地,所述机器人控制舱的舱体为圆柱状结构,舱体的内部设置有支撑架;
20、支撑架包括一个u型架,所述u型架转角开口的两侧均一体连接有连接板,所述舱体内设置有支撑柱,所述连接板的两侧均对应连接有一个支撑柱,支撑柱一端与舱体固定连接,支撑柱另一端与连接板固定连接;
21、所述小电源管理板设置于u型架转角的外侧,所述通讯板设置于u型架其中一个侧壁的外侧,控制板设置于u型架另一个侧壁的外侧,u型架两个侧壁之间设置通讯转换板。
22、可选地,所述框架两侧的中部均开设有凹槽,凹槽的槽口出均固定连接有把手,把手上设置有防滑垫。
23、可选地,所述框架的两个侧壁的外侧均安装有防护板。
24、可选地,所述浮材的顶部设置有安装座,安装座包括底部的吸盘底座,吸盘底座的顶部固定连接有连接座,用来连接外设,吸盘座的一侧设置有手动真空泵。
25、可选地,所述框架为铝合金材质,支撑板为碳纤维板;
26、所述框架的折弯处设置有加强筋。
27、可选地,所述框架上设置有若干减重孔,用来减轻框架的重量。
28、本发明至少具有以下有益效果:
29、本发明通过设置一体式的u型框架,在框架两个侧壁的内侧设置支撑组件,用来支撑支撑板,支撑板作为上板,固定机器人的各种元器件,一体式设置,整体刚度较高,同时通过支撑板的支撑,能够起到一定的支撑作用,防止框架变形,更加稳固。
30、通过设置摄像头第一线缆与照明灯第二线缆与云台同轴固定转动,同时摄像头第一线缆与照明灯第二线缆通过远端固定座固定在支撑板上,并与近端固定座之间存在一定的间隔,第一线缆与第二线缆的长度大于ab点之间的距离,使第一线缆和第二线缆在ab点之间存在一定的自由度,可以在固定件随着云台转动时,带动第一线缆和第二线缆做双绞线运动,扭矩较小,且云台的转动幅度较大,以此减小线缆对云台转动的影响。
技术特征:
1.一种水下机器人,包括框架,以及设置于所述框架上的推进器、导流罩、云台,框架顶部连接浮材;
2.根据权利要求1所述的一种水下机器人,其特征在于:所述云台包括摄像头、照明灯、声呐以及水下舵机;
3.根据权利要求2所述的一种水下机器人,其特征在于:还包机器人控制舱和电源舱;
4.根据权利要求2所述的一种水下机器人,其特征在于:所述固定件一侧通过舵机轴承组与水下舵机连接,所述固定件另一端通过远端轴承组与支撑板连接;
5.根据权利要求3所述的一种水下机器人,其特征在于:所述机器人控制舱的舱体为圆柱状结构,舱体的内部设置有支撑架;
6.根据权利要求1所述的一种水下机器人,其特征在于:所述框架两侧的中部均开设有凹槽,凹槽的槽口出均固定连接有把手,把手上设置有防滑垫。
7.根据权利要求1所述的一种水下机器人,其特征在于:所述框架的两个侧壁的外侧均安装有防护板。
8.根据权利要求1所述的一种水下机器人,其特征在于:所述浮材的顶部设置有安装座,安装座包括底部的吸盘底座,吸盘底座的顶部固定连接有连接座,用来连接外设,吸盘座的一侧设置有手动真空泵。
9.根据权利要求1所述的一种水下机器人,其特征在于:所述框架为铝合金材质,支撑板为碳纤维板;
10.根据权利要求1所述的一种水下机器人,其特征在于:所述框架上设置有若干减重孔,用来减轻框架的重量。
技术总结
本发明公开了一种水下机器人,涉及水下机器人技术领域。该水下机器人包括框架,以及设置于所述框架上的推进器、导流罩、云台,框架顶部连接浮材;所述框架为U型的一体式框架;所述框架两个侧壁相互靠近的一侧均设置有支撑组件;所述框架的两个侧壁之间设置有支撑板,所述支撑板的两侧固定连接于两个侧壁的支撑组件上;所述框架上与所述推进器对应的位置处设置有通孔,方便推进器过水。本发明通过设置一体式的U型框架,在框架两个侧壁的内侧设置支撑组件,用来支撑支撑板,支撑板作为上板,固定机器人的各种元器件,一体式设置,整体刚度较高,同时通过支撑板的支撑,能够起到一定的支撑作用,防止框架变形,更加稳固。
技术研发人员:常建,杜海,王亚辉,杨磊,项元璞,常善强,王晓飞,许东亚,牛俊
受保护的技术使用者:徐州鲁班智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!