基于仿生原理的无动力底层漂流着陆器
本发明涉及海洋装备着陆器领域,尤其涉及一种基于仿生原理的无动力底层漂流着陆器。
背景技术:
1、深海着陆器利用自身重力抵达海底,执行坐底观察及采样等作业,再通过抛载实现上浮。通常来讲,着陆器一旦坐底就不能移动,其主要影响因素是受到了能量供给和系统复杂度的限制。cn216611553u公开了一种深海着陆器,通过增加电量、推进器及声学通信设备,为自身提供了一定的机动能力,但同时增加了系统复杂度和整体重量;且系统构成向无人潜水器靠拢,大幅提高了研发成本。
2、因此,在充分利用着陆器的无动力和低成本特性基础上,提高其机动能力,有利于扩展其在深海科学研究及探索中的应用场景。
技术实现思路
1、针对上述现有技术中的不足,本发明提供一种基于仿生原理的无动力底层漂流着陆器,基于蜘蛛吐丝飞行的仿生原理,将传统着陆器的刚性连接,转变为柔性缆连接;利用海流对柔性缆的推动作用,实现了着陆器在近底附近的无动力巡航。
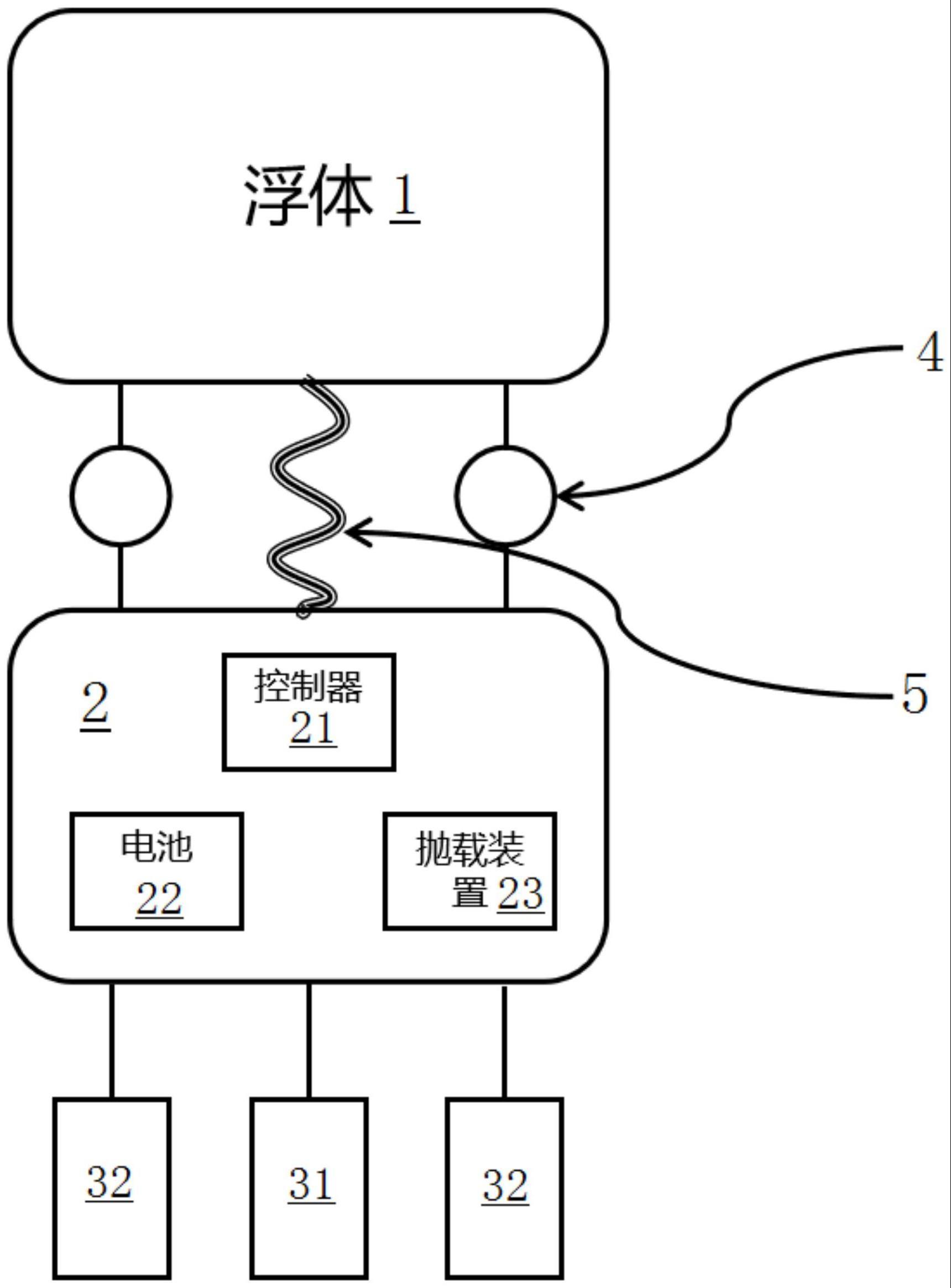
2、为了实现上述目的,本发明提供一种基于仿生原理的无动力底层漂流着陆器,包括一浮体、一着陆器本体、若干吊挂装置、一柔性承重缆和多个压载;所述浮体通过所述吊挂装置连接所述着陆器本体;所述柔性承重缆松弛连接于所述浮体与所述着陆器本体之间;所述着陆器本体包括一控制器以及连接于所述控制器的一电池和多个抛载装置;所述抛载装置连接所述压载;所述控制器还连接所述吊挂装置。
3、优选地,所述抛载装置包括机械式抛载装置、电磁式抛载装置、电化学熔断抛载装置或上电消磁式电磁吸附装置。
4、优选地,所述吊挂装置包括机械式吊挂装置、电磁式吊挂装置、电化学熔断吊挂装置或上电消磁式电磁吸附装置。
5、优选地,所述着陆器本体还包括一浮力装置。
6、优选地,所述浮力装置包括一橡胶囊、一油泵和一供油装置;所述供油装置通过管道连接所述橡胶囊,所述油泵安装于所述管道上;所述橡胶囊安装于所述着陆器本体。
7、优选地,所述浮力装置包括若干垂向推进器;所述垂向推进器安装于所述着陆器本体。
8、本发明由于采用了以上技术方案,使其具有以下有益效果:
9、基于蜘蛛吐丝飞行的仿生原理,将传统着陆器的刚性连接,转变为柔性承重缆连接。利用海流对柔性承重缆的推动作用,实现了着陆器本体在近底附近的无动力巡航。更进一步地,通过调节压载的重量,可以实现不同深度,甚至全海深的无动力巡航,大幅扩展了着陆器原本只能坐底作业的应用场景,为深海科学研究和探索提供了新的技术思路。
技术特征:
1.一种基于仿生原理的无动力底层漂流着陆器,其特征在于,包括一浮体(1)、一着陆器本体(2)、若干吊挂装置(4)、一柔性承重缆(5)和多个压载;所述浮体(1)通过所述吊挂装置(4)连接所述着陆器本体(2);所述柔性承重缆(5)松弛连接于所述浮体(1)与所述着陆器本体(2)之间;所述着陆器本体(2)包括一控制器(21)以及连接于所述控制器(21)的一电池(22)和多个抛载装置(23);所述抛载装置(23)连接所述压载;所述控制器(21)还连接所述吊挂装置(4)。
2.根据权利要求1所述的基于仿生原理的无动力底层漂流着陆器,其特征在于,所述抛载装置(23)包括机械式抛载装置、电磁式抛载装置、电化学熔断抛载装置或上电消磁式电磁吸附装置。
3.根据权利要求1所述的基于仿生原理的无动力底层漂流着陆器,其特征在于,所述吊挂装置(4)包括机械式吊挂装置、电磁式吊挂装置、电化学熔断吊挂装置或上电消磁式电磁吸附装置。
4.根据权利要求1所述的基于仿生原理的无动力底层漂流着陆器,其特征在于,所述着陆器本体(2)还包括一浮力装置。
5.根据权利要求4所述的基于仿生原理的无动力底层漂流着陆器,其特征在于,所述浮力装置包括一橡胶囊、一油泵和一供油装置;所述供油装置通过管道连接所述橡胶囊,所述油泵安装于所述管道上;所述橡胶囊安装于所述着陆器本体(2)。
6.根据权利要求4所述的基于仿生原理的无动力底层漂流着陆器,其特征在于,所述浮力装置包括若干垂向推进器;所述垂向推进器安装于所述着陆器本体(2)。
技术总结
本发明提供一种基于仿生原理的无动力底层漂流着陆器,包括一浮体、一着陆器本体、若干吊挂装置、一柔性承重缆和多个压载;所述浮体通过所述吊挂装置连接所述着陆器本体;所述柔性承重缆松弛连接于所述浮体与所述着陆器本体之间;所述着陆器本体包括一控制器以及连接于所述控制器的一电池和多个抛载装置;所述抛载装置连接所述压载;所述控制器还连接所述吊挂装置。本发明的一种基于仿生原理的无动力底层漂流着陆器,基于蜘蛛吐丝飞行的仿生原理,将传统着陆器的刚性连接,转变为柔性缆连接;利用海流对柔性缆的推动作用,实现了着陆器在近底附近的无动力巡航。
技术研发人员:罗瑞龙,张锦飞,宋婷婷,王芳,吴瑜,张建,殷宝吉
受保护的技术使用者:上海海洋大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!