基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统的制作方法
本发明属于深海观测,特别涉及基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统。
背景技术:
1、海洋尤其是深海的探索开发,依赖于海洋科学技术的发展。而任何海洋科学观点的产生、海洋学科的发展,都必须以可靠的观测数据为基础。水下自主航行器是新型的海洋环境移动观测设备,它拥有自主的动力和导航系统,可以装载各种传感器,对海洋环境进行动态、立体的观测。但是受到电池容量的限制,水下自主航行器的运行范围和工作时间很有限,需要船基回收站进行能量的补充,这大大限制了水下自主航行器的观测的范围,也极大的增加的观测成本。海洋浮标潜标也是一种重要的海洋观测设备,同样是由于电池容量的限制,其运行周期小于60天,不能长时间观测海洋数据。
2、同时现有的海洋发电设备,使用升力型水平轴海流轮机作为动力源进行发电,根据行业报告显示升力型水平轴海流轮机的启动流速普遍超过0.7m/s,额定流速同样超过2m/s。由于深海的流速较低,其流速在0.1m/s到0.5m/s之间,所以此类的海流轮机不能在深海低流速的环境下启动。
技术实现思路
1、本发明的目的在于提供等厚度圆弧翼叶片海流轮机的离网式深海观测系统,以解决现有技术探测范围小,以及无法实现深海发电的问题。
2、为实现上述目的,本发明采用以下技术方案:
3、等厚度圆弧翼叶片海流轮机的离网式深海观测系统,包括深海基站、浮标系统和水下自主航行器;浮标系统连接在深海基站上,深海基站用于给浮标系统和水下自主航行器供电,浮标系统和水下自主航行器用于采集水文信息;
4、深海基站包括支架、磁悬浮支撑装置、等厚度圆弧翼叶片海流轮机、磁传动装置、静密封腔体、发电装置、储能系统、传感器系统和无线充电接驳装置;支架的一端设置在静密封腔体的侧面,另一端位于静密封腔体的顶部,且设置有磁悬浮支撑装置;等厚度圆弧翼叶片海流轮机设置在静密封腔体上,且顶部连接磁悬浮支撑装置;磁传动装置设置在等厚度圆弧翼叶片海流轮机和发电装置之间,发电装置和储能系统安装在静密封腔体内部且互相连接;传感器系统及无线充电接驳装置均安装于静密封腔体侧部的支架上;储能系统的电能输出线与无线充电接驳装置和传感器系统相连。
5、进一步的,静密封腔体安装于重力底座上,重力底座安装于海床上。
6、进一步的,发电装置为永磁发电机,磁传动装置包括上部磁传动装置和下部磁传动装置,上部磁传动装置和下部磁传动装置上均周向设置有若干永磁体,相邻永磁体的磁极安装方式相反;上部磁传动装置安装于等厚度圆弧翼叶片海流轮机下部,下部磁传动装置安装于静密封腔体的内部上端;下部磁传动装置与永磁发电机同轴连接。
7、进一步的,发电装置为分离电机,分离电机设置在静密封腔体的内部,且与储能系统连接;上部磁传动装置安装于等厚度圆弧翼叶片海流轮机下部,上部磁传动装置旋转时,分离电机产生电流。
8、进一步的,磁悬浮支撑装置包括支撑装置外壳、外部被动式永磁磁悬浮轴承、内部被动式永磁磁悬浮轴承和陀尖装置;外部被动式永磁磁悬浮轴承嵌套于支撑装置外壳内部,内部被动式永磁磁悬浮轴承安装在陀尖的外部,外部被动式永磁磁悬浮轴承和内部被动式永磁磁悬浮轴承的充磁方式为辐射充磁,内部和外部分别具有不同的磁极。
9、进一步的,被动式永磁磁悬浮轴承的内环通过陀尖与等厚度圆弧翼叶片海流轮机相连,被动式永磁磁悬浮轴承的外环安装在支撑装置外壳从而和支架连接。
10、进一步的,等厚度圆弧翼叶片海流轮机包括海流轮机端板、若干薄膜叶片和叶片中心轴;两个海流轮机端板互相平行且同心安装在叶片中心轴上,若干薄膜叶片安装在两个海流轮机端板中间,且若干薄膜叶片在海流轮机端板之间成中心对称;薄膜叶片圆弧翼型叶片,在不同的位置叶片厚度相等。
11、进一步的,浮标系统包括浮标传感器系统、水下电缆和浮标;浮标传感器系统和浮标分别安装在水下电缆中部和端部,水下电缆与深海基站相连;浮标传感器系统包括轮式系统、传感器系统、控制系统及储能模块、无线充电系统和密封外壳;无线充电系统、控制系统及储能模块设置在密封外壳内部,轮式系统和传感器系统设置在密封外壳外部,且轮式系统和传感器系统均连接到控制系统及储能模块,通过轮式系统设置在水下电缆上,用于进行垂直移动。
12、进一步的,水下自主航行器包括水下自主航行器主体、无线充电装置和观测系统组成;无线充电装置和观测系统组成分别安装在水下自主航行器主体的头部和上部。
13、与现有技术相比,本发明有以下技术效果:
14、本发明提出了等厚度圆弧翼叶片海流轮机的离网式深海观测系统,这种深海观测系统由水下自主航行器,深海基站和浮标系统组成。这种深海基站利用等厚度圆弧翼叶片的海流轮机转化深海的海流能,同时可以将电能转化成自身的化学能储藏在自身的电池中,给基站搭载的各项观测设备供电,也可以通过无线供电装置给水下自主航行器供电和浮标系统供电。利用本发明可在不接受任何船基能量补给和岸基能量补给的情况下持续观测海洋能源。
15、本发明使用等厚度圆弧翼叶片的海流轮机,具有较大的叶片实度,为阻力型海流轮机。相比传统的升力型水轮机,在具备一定旋转速度时才可达到力矩峰值。本发明使用等厚度圆弧翼叶片的海流轮机在不旋转时,水流和叶片具有最大的速度差,可以产生峰值力矩,即启动力矩为最大力矩。因而本发明使用等厚度圆弧翼叶片的海流轮机可以在深海较低的水流条件下,实现平稳自启动。
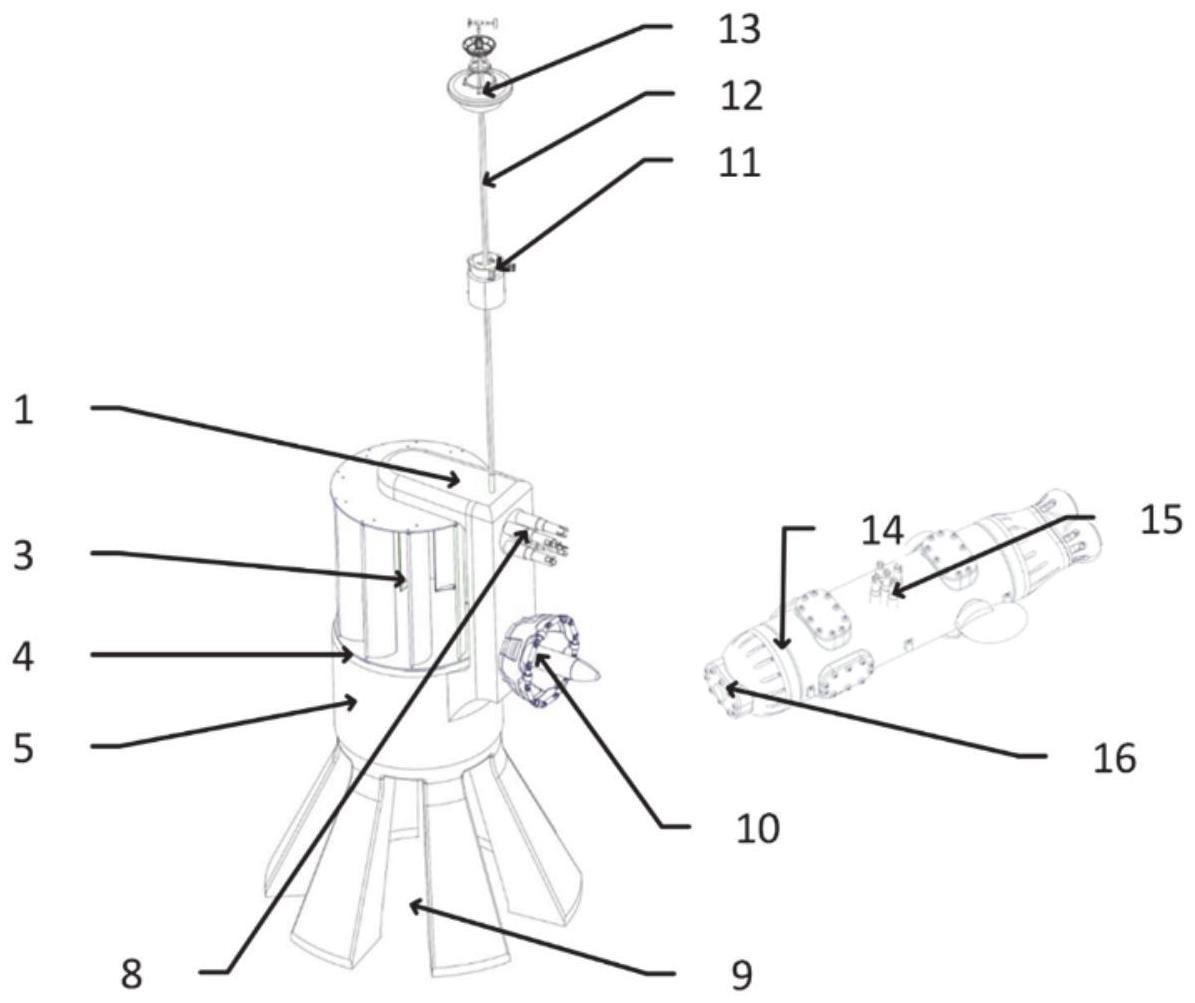
16、图1深海观测系统的轴测图;
17、图2深海观测系统的主视图;
18、图3深海观测系统的透视轴测图;
19、图4深海观测系统的透视主视图;
20、图5深海基站轴测图;
21、图6深海基站主视图;
22、图7深海基站透视轴测图;
23、图8深海基站透视主视图;
24、图9磁悬浮支撑装置零件透视主视图;
25、图10磁悬浮支撑装置零件透视侧视图;
26、图11磁悬浮支撑装置内部结构透视轴测图;
27、图12磁悬浮支撑装置内部结构透视侧视图;
28、图13支撑装置工作示意图;
29、图14等厚度圆弧翼叶片海流轮机零件轴测图;
30、图15等厚度圆弧翼叶片海流轮机的透视零件轴测图;
31、图16等厚度圆弧翼叶片海流轮机的a-a横截面;
32、图17上半部分磁传动装置仰视图;
33、图18下半部分磁传动装置俯视图;
34、图19磁传动装置原理示意图;
35、图20浮标传感器系统结构示意图;
36、图21浮标传感器系统的充电示意图;
37、图22水下自主航行器轴测图;
38、图23深海观测系统工作示意图;
39、图24深海基站的传动部分轴测图;
40、图25分离式电机工作示意图。
技术特征:
1.基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统,其特征在于,包括深海基站、浮标系统和水下自主航行器;浮标系统连接在深海基站上,深海基站用于给浮标系统和水下自主航行器供电,浮标系统和水下自主航行器用于采集水文信息;
2.根据权利要求1所述的基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统,其特征在于,静密封腔体(5)安装于重力底座(9)上,重力底座(9)安装于海床上。
3.根据权利要求1所述的基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统,其特征在于,发电装置为永磁发电机(6),磁传动装置(4)包括上部磁传动装置(41)和下部磁传动装置(42),上部磁传动装置(41)和下部磁传动装置(42)上均周向设置有若干永磁体,相邻永磁体的磁极安装方式相反;上部磁传动装置(41)安装于等厚度圆弧翼叶片海流轮机(3)下部,下部磁传动装置(42)安装于静密封腔体(5)的内部上端;下部磁传动装置(42)与永磁发电机(6)同轴连接。
4.根据权利要求3所述的基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统,其特征在于,发电装置为分离电机(20),分离电机(20)设置在静密封腔体(5)的内部,且与储能系统(7)连接;上部磁传动装置(41)安装于等厚度圆弧翼叶片海流轮机(3)下部,上部磁传动装置(41)旋转时,分离电机(20)产生电流。
5.根据权利要求1所述的基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统,其特征在于,磁悬浮支撑装置(2)包括支撑装置外壳(21)、外部被动式永磁磁悬浮轴承(22)、内部被动式永磁磁悬浮轴承(23)和陀尖装置(24);外部被动式永磁磁悬浮轴承(22)嵌套于支撑装置外壳(21)内部,内部被动式永磁磁悬浮轴承(23)安装在陀尖(24)的外部,外部被动式永磁磁悬浮轴承(22)和内部被动式永磁磁悬浮轴承(23)的充磁方式为辐射充磁,内部和外部分别具有不同的磁极。
6.根据权利要求5所述的基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统,其特征在于,被动式永磁磁悬浮轴承(22)的内环通过陀尖(24)与等厚度圆弧翼叶片海流轮机(3)相连,被动式永磁磁悬浮轴承(22)的外环安装在支撑装置外壳(21)从而和支架(1)连接。
7.根据权利要求1所述的基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统,其特征在于,等厚度圆弧翼叶片海流轮机(3)包括海流轮机端板(31)、若干薄膜叶片(32)和叶片中心轴(33);两个海流轮机端板(31)互相平行且同心安装在叶片中心轴(33)上,若干薄膜叶片(32)安装在两个海流轮机端板(31)中间,且若干薄膜叶片(32)在海流轮机端板(31)之间成中心对称;薄膜叶片(32)圆弧翼型叶片,在不同的位置叶片厚度相等。
8.根据权利要求1所述的基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统,其特征在于,浮标系统包括浮标传感器系统(11)、水下电缆(12)和浮标(13);浮标传感器系统(11)和浮标(13)分别安装在水下电缆(12)中部和端部,水下电缆(12)与深海基站相连;浮标传感器系统(11)包括轮式系统(111)、传感器系统(112)、控制系统及储能模块(113)、无线充电系统(114)和密封外壳(115);无线充电系统(114)、控制系统及储能模块(113)设置在密封外壳(115)内部,轮式系统(111)和传感器系统(112)设置在密封外壳(115)外部,且轮式系统(111)和传感器系统(112)均连接到控制系统及储能模块(113),通过轮式系统(111)设置在水下电缆(12)上,用于进行垂直移动。
9.根据权利要求1所述的基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统,其特征在于,水下自主航行器包括水下自主航行器主体(14)、无线充电装置(15)和观测系统组成(16);无线充电装置(15)和观测系统组成(16)分别安装在水下自主航行器主体(14)的头部和上部。
技术总结
基于等厚度圆弧翼叶片海流轮机的离网式深海观测系统,包括深海基站、浮标系统和水下自主航行器;浮标系统连接在深海基站上,深海基站用于给浮标系统和水下自主航行器供电,浮标系统和水下自主航行器用于采集水文信息;本发明提出了等厚度圆弧翼叶片海流轮机的离网式深海观测系统。这种深海基站利用等厚度圆弧翼叶片的海流轮机转化深海的海流能,同时可以将电能转化成自身的化学能储藏在自身的电池中,给基站搭载的各项观测设备供电,也可以通过无线供电装置给水下自主航行器供电和浮标系统供电。利用本发明可在不接受任何船基能量补给和岸基能量补给的情况下持续观测海洋能源。
技术研发人员:郭朋华,张大禹,段昱冰,叶佳胤,王逸远,钱宇祁,陈云瑞,朱李莹,陈雅楠
受保护的技术使用者:陕西卫澜深海信息科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!