一种水下结构清洗检测作业机器人的制作方法
本发明涉及海洋工程装备,特别涉及一种水下结构清洗检测作业机器人。
背景技术:
1、由于受到复杂的海洋环境的影响,海洋结构物常常会受到海洋中的污损生物附着,为了保证海洋结构物的安全性和可靠性,需要定期对海洋结构物进行附着生物的清除和安全性检测。
2、目前,海洋结构物的清洗和检测在50m内一般是依靠人工作业进行,当水深超过50m,一般采用水下机器人进行清洗检测。对于水下机器人在水下作业时,一般是依靠履带、磁吸附机构、吸盘或行走机构等爬行于海洋结构物,为了保证水下机器人在清洁时的稳定性,一般采用底盘夹持机构对海洋结构物的框架进行夹紧,然后再进行清洗和检测。
3、然而,水下机器人相关清洗技术中,其清洗作业时,难以适应平面、曲面和圆柱面等不同形式的海洋结构物表面,导致灵活性差、活动范围小,造成水下机器人的清洗效率低和作业能力水平不高。
技术实现思路
1、本发明提供一种水下结构清洗检测作业机器人,用以解决相关技术中,水下机器人难以适应平面、曲面和圆柱面等不同形式的海洋结构物表面,导致灵活性差、活动范围小,造成水下机器人的清洗效率低和作业能力水平不高的问题。
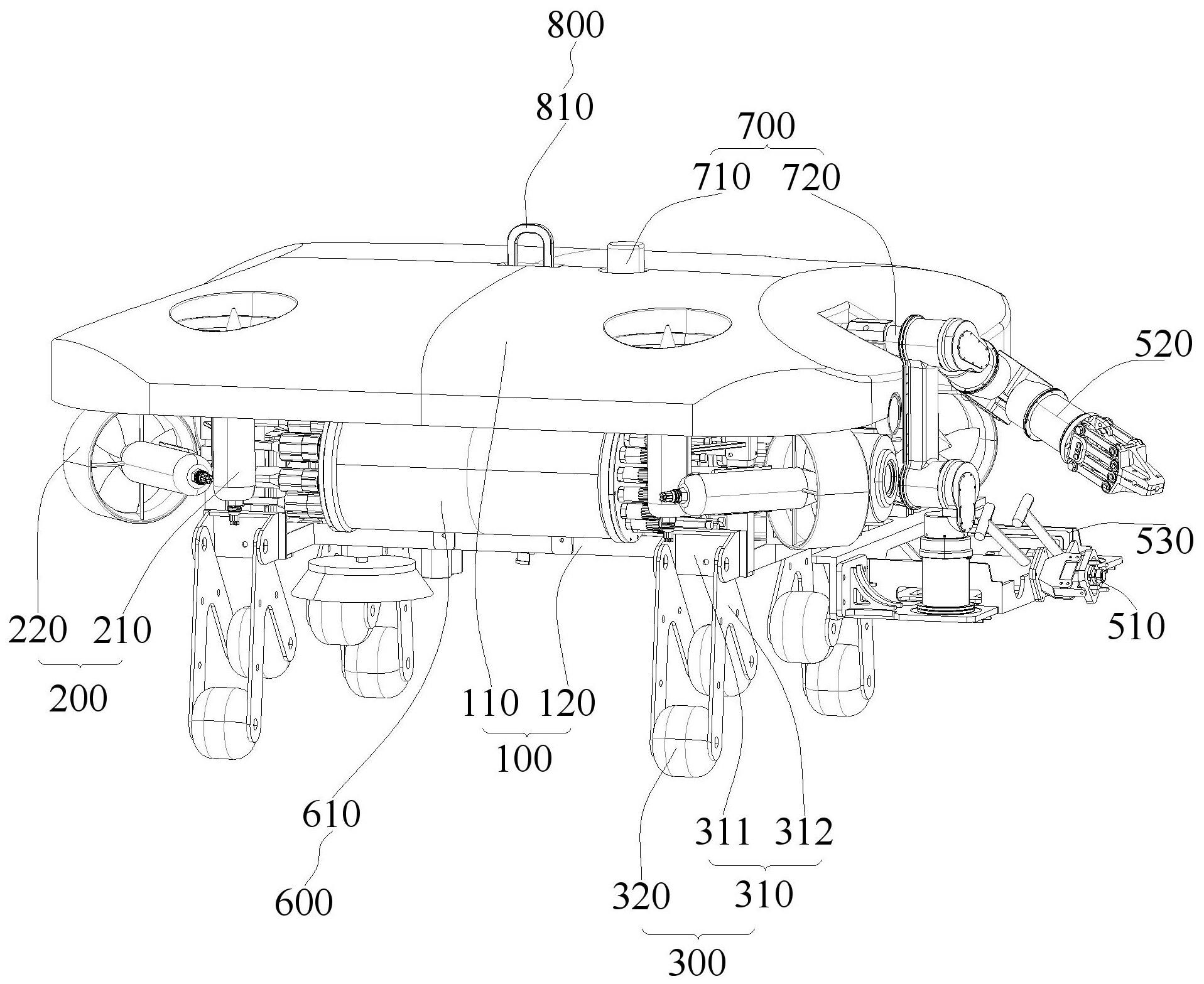
2、本发明提供的一种水下结构清洗检测作业机器人,包括:
3、浮游载体,包括浮游体和主框架体,浮游体为主框架体提供浮力;
4、推进机构,设于主框架体,适于推动主框架体在水里运动;
5、抵紧机构,包括抵紧架和抵紧件,所述抵紧架铰接于所述主框架体,所述抵紧件转动连接于所述抵紧架,所述推进机构通过推动所述浮游载体使所述抵紧件抵紧于海洋结构物;
6、清洗装置,包括清洗机构和固定装置,固定装置固定于主框架体,清洗机构可伸缩设于固定装置。
7、具体地,本发明提供的水下结构清洗检测作业机器人通过设置推进机构和抵紧机构联动配合,使抵紧机构的抵紧件抵紧于海洋结构物,以保证机器人抵紧于海洋结构物的稳定性,在此基础上借助清洗装置的伸缩功能,可以使清洗机构与海洋结构物的接触面积增加,以扩大对海洋结构物的清洁范围,从而提高机器人的清洗效率和作业能力水平。
8、在一些实施方式中,抵紧架包括固定架和摆动架,抵紧件包括滚轮,固定架固定设置于主框架体,摆动架铰接于固定架,滚轮转动连接于摆动架。由此,可以使抵紧机构可以适应平面、曲面和圆柱面等不同形式的海洋结构物表面,能够提高机器人的灵活性和扩大其活动范围,抵紧件设置为滚轮也可以使抵紧作业过程更平稳。
9、在一些实施方式中,摆动架包括相互呈固定夹角设置的第一摆动臂和第二摆动臂,第一摆动臂和第二摆动臂都铰接于固定架,
10、滚轮包括第一滚轮和第二滚轮,第一滚轮转动连接于第一摆动臂,第二滚轮转动连接于第二摆动臂。由此,进一步提高第一滚轮和第二滚轮与海洋结构物表面抵紧时的稳定性,保证抵紧机构完全抵紧于海洋结构物表面。
11、在一些实施方式中,清洗机构包括清洗件、第一驱动件和伸缩件,伸缩件与固定装置伸缩连接,第一驱动件设于伸缩件,第一驱动件与清洗件驱动连接,适于驱动清洗件对海洋结构物进行清洁。由此,可以调节打磨盘与海洋结构物表面的距离,从而扩大打磨盘与海洋结构物表面的清洗范围,进而提高清洗效率和作业能力水平。
12、在一些实施方式中,固定装置包括导向支架和第二驱动件,导向支架固定于主框架体,第二驱动件设于导向支架,第二驱动件与伸缩件驱动连接,适于驱动伸缩件在导向支架作伸缩运动。由此,可以简化清洗装置的结构,以节省制作成本。
13、在一些实施方式中,推进机构包括垂直推进器和水平推进器,垂直推进器设于主框架体,适于推动主框架体沿竖直方向运动,水平推进器矢量布置于主框架体,适于推动主框架体沿水平方向运动和姿态调整。由此,垂直推进器可以为框架提供竖直方向的推力,水平推进器可以为框架提供水平方向的推力,水平方向呈矢量布置,使机器人具备六自由度运动的能力,以进一步提高机器人运动的灵活性和活动范围。
14、在一些实施方式中,还包括检测机构,检测机构包括检测工具、机械手和储存结构;
15、储存结构固定于主框架体,适于储存检测工具;
16、机械手安装于主框架体,适于夹取检测工具,以对海洋结构物进行检测。由此,可以检测海洋结构物的具体情况。
17、在一些实施方式中,还包括处理单元,处理单元包括舱体、动力系统和控制系统;
18、舱体设于主框架体并设有空舱,动力系统和控制系统都设置在空舱;
19、动力系统与推进机构、清洗装置和检测机构电连接,以提供动力;
20、控制系统与推进机构、清洗装置和检测机构电连接,适于控制推进机构的推进动作、控制清洗装置的清洗动作和控制检测机构的检测动作。由此,可以使机器人更智能化,操作更简单。
21、在一些实施方式中,还包括辅助机构,辅助机构包括声通设备和摄像头,声通设备和摄像头均安装于主框架体并与处理单元电连接,声通设备适于定位机器人的位置,摄像头适于反馈实时图像。由此,可以实时反馈机器人作业时的位置和实时画面情况,进一步提升机器人的智能化,简化机器人的操作。
22、在一些实施方式中,还包括起吊机构,起吊机构包括起吊环,起吊环固定于主框架体。由此,可以方便机器人作业时的起吊。
23、本发明提供的水下结构清洗检测作业机器人,区别于现有技术的有益效果在于:通过设置推进机构和抵紧机构联动配合,推进机构推动主框架体使抵紧机构的抵紧件抵紧于海洋结构物,抵紧件在推进机构的推力下紧贴海洋结构物,以保证抵紧于海洋结构物的稳定性,由于推进机构可以推动抵紧机构在水里自由运动,使抵紧机构的灵活性强、活动范围大,当机器人要固定在海洋结构物需要清洗的地方时,只需要调整推进机构的推进力方向使抵紧机构抵紧于海洋结构物表面即可,这样可以令机器人可以更容易适应平面、曲面和圆柱面等不同形式的海洋结构物表面,能够提高机器人的灵活性和扩大其活动范围;另外,清洗装置还设置可伸缩设于固定装置的清洗机构,能够调节清洗机构与海洋结构物的距离,通过调节缩短清洗机构与海洋结构物的距离,可以使清洗机构与海洋结构物的接触面积增加,以扩大对海洋结构物的清洁范围,从而提高机器人的清洗效率和作业能力水平。
技术特征:
1.一种水下结构清洗检测作业机器人,其特征在于,包括:
2.根据权利要求1所述的水下结构清洗检测作业机器人,其特征在于,所述抵紧架包括固定架和摆动架,所述抵紧件包括滚轮,所述固定架固定设置于所述主框架体,所述摆动架铰接于所述固定架,所述滚轮转动连接于所述摆动架。
3.根据权利要求2所述的水下结构清洗检测作业机器人,其特征在于,所述摆动架包括相互呈固定夹角设置的第一摆动臂和第二摆动臂,所述第一摆动臂和所述第二摆动臂都铰接于所述固定架,
4.根据权利要求1所述的水下结构清洗检测作业机器人,其特征在于,所述清洗机构包括清洗件、第一驱动件和伸缩件,所述伸缩件与所述固定装置伸缩连接,所述第一驱动件设于所述伸缩件,所述第一驱动件与所述清洗件驱动连接,适于驱动所述清洗件对海洋结构物进行清洗。
5.根据权利要求4所述的水下结构清洗检测作业机器人,其特征在于,所述固定装置包括导向支架和第二驱动件,所述导向支架固定于所述主框架体,所述第二驱动件设于所述导向支架,所述第二驱动件与所述伸缩件驱动连接,适于驱动所述伸缩件在所述导向支架作伸缩运动。
6.根据权利要求1所述的水下结构清洗检测作业机器人,其特征在于,所述推进机构包括垂直推进器和水平推进器,所述垂直推进器设于所述主框架体,适于推动所述主框架体沿竖直方向运动,所述水平推进器矢量布置于所述主框架体,适于推动所述主框架体沿水平方向运动和姿态调整。
7.根据权利要求1至6任一项所述的水下结构清洗检测作业机器人,其特征在于,还包括检测机构,所述检测机构包括检测工具、机械手和储存结构;
8.根据权利要求7所述的水下结构清洗检测作业机器人,其特征在于,还包括处理单元,所述处理单元包括舱体、动力系统和控制系统;
9.根据权利要求8所述的水下结构清洗检测作业机器人,其特征在于,还包括辅助机构,所述辅助机构包括声通设备和摄像头,所述声通设备和所述摄像头均安装于所述主框架体并与所述处理单元电连接,所述声通设备适于定位机器人的位置,所述摄像头适于反馈实时图像。
10.根据权利要求9所述的水下结构清洗检测作业机器人,其特征在于,还包括起吊机构,所述起吊机构包括起吊环,所述起吊环固定于所述主框架体。
技术总结
本发明涉及海洋工程装备技术领域,提供一种水下结构清洗检测作业机器人,该水下结构清洗检测作业机器人包括浮游载体、推进机构、抵紧机构和清洗装置。浮游载体包括浮游体和主框架体,浮游体为主框架体提供浮力;推进机构设于主框架体;抵紧机构包括抵紧架和抵紧件,抵紧架铰接于主框架体,抵紧件转动连接于抵紧架,推进机构在水下通过推动浮游载体使抵紧件抵紧于海洋结构物表面,使机器人可适应不同曲率的海洋结构物表面。清洗装置包括清洗机构和固定装置,固定装置固定于主框架体,清洗机构可伸缩设于固定装置,以调节清洗机构与海洋结构物的距离和对海洋结构物的清洗范围,提高机器人的清洗效率和作业能力水平。
技术研发人员:杨文林,叶作霖,薛乃耀,周思奇,蒋健波,刘涛
受保护的技术使用者:广东智能无人系统研究院(南沙)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!