一种对波浪主动补偿的双体船及控制方法
本发明属于船舶设计领域,具体涉及一种对波浪主动补偿的双体船及控制方法。
背景技术:
1、在传统船舶设计中,单体船常常会在海上航行时遇到摇晃和晃动的问题,这会影响船舶的稳定性和舒适性,尤其是在恶劣的海况下,影响十分显著。传统方法中,船舶通过调整船体结构和使用稳定器等装置来减轻晃动,但这些方法存在一定的局限性。为了解决这一问题,研究人员和设计师一直在寻求创新的船舶设计,以提供更平稳的海上航行体验。双体船作为一种改进的船舶设计方案,已经引起了广泛的关注。
2、中国专利cn202111485923.7公开了一种波浪补偿船舶及其补偿方法,该船舶包括用于航行的船型主体、甲板平台、补偿装置,补偿装置用于对甲板平台进行波浪补偿,船型主体包括若干船体单元和缓冲连接装置,每个船体单元与甲板平台之间均设置有补偿装置,缓冲连接装置包括第一伺服缸,第一伺服缸包括固定副和移动副,移动副上套设有弹簧阻尼,弹簧阻尼一端与固定副连接,另一端与移动副固定连接,固定副与一个船体单元的侧面铰接,移动副与另一个船体单元的侧面铰接。该方案虽对翻滚和起伏这两个自由度进行了补偿。但是,船体单元之间的缓冲连接装置是采用机械传动的方式,使用伺服缸和弹簧阻尼器来实现补偿。这种结构复杂度较高,可靠性和稳定性会较差。同时,补偿装置也主要依靠机械传动的伺服缸来实现。这种方式效率不高,且对能源的需求大,同时动态响应速度较慢。中国专利cn201710487134.4公开了一种采用双体船增稳的平台,包括两个分别自由纵摇的船体、稳定平台、推进器和悬架机构,所述悬架机构连接所述船体和所述稳定平台,所述推进器为所述船体提供动力。然而该方案中增稳方式主要依靠船头的姿态调节机构。由于船尾u型支撑杆为刚性件、无法伸缩,所以该平台在补偿翻滚和起伏这两个自由度上存在不足。
3、因此,对于双体船的波浪主动补偿与船舶稳定性,仍需要进一步进行研究。
技术实现思路
1、本发明的目的就是为了解决上述问题至少其一而提供一种对波浪主动补偿的双体船及控制方法,以解决现有技术中在双体船航行中会受波浪影响而导致船舱发生晃动的缺陷,实现了对船舱的姿态进行主动补偿与控制,最大限度地减少船舱的晃动,提高船舶的航行稳定性。
2、本发明的目的通过以下技术方案实现:
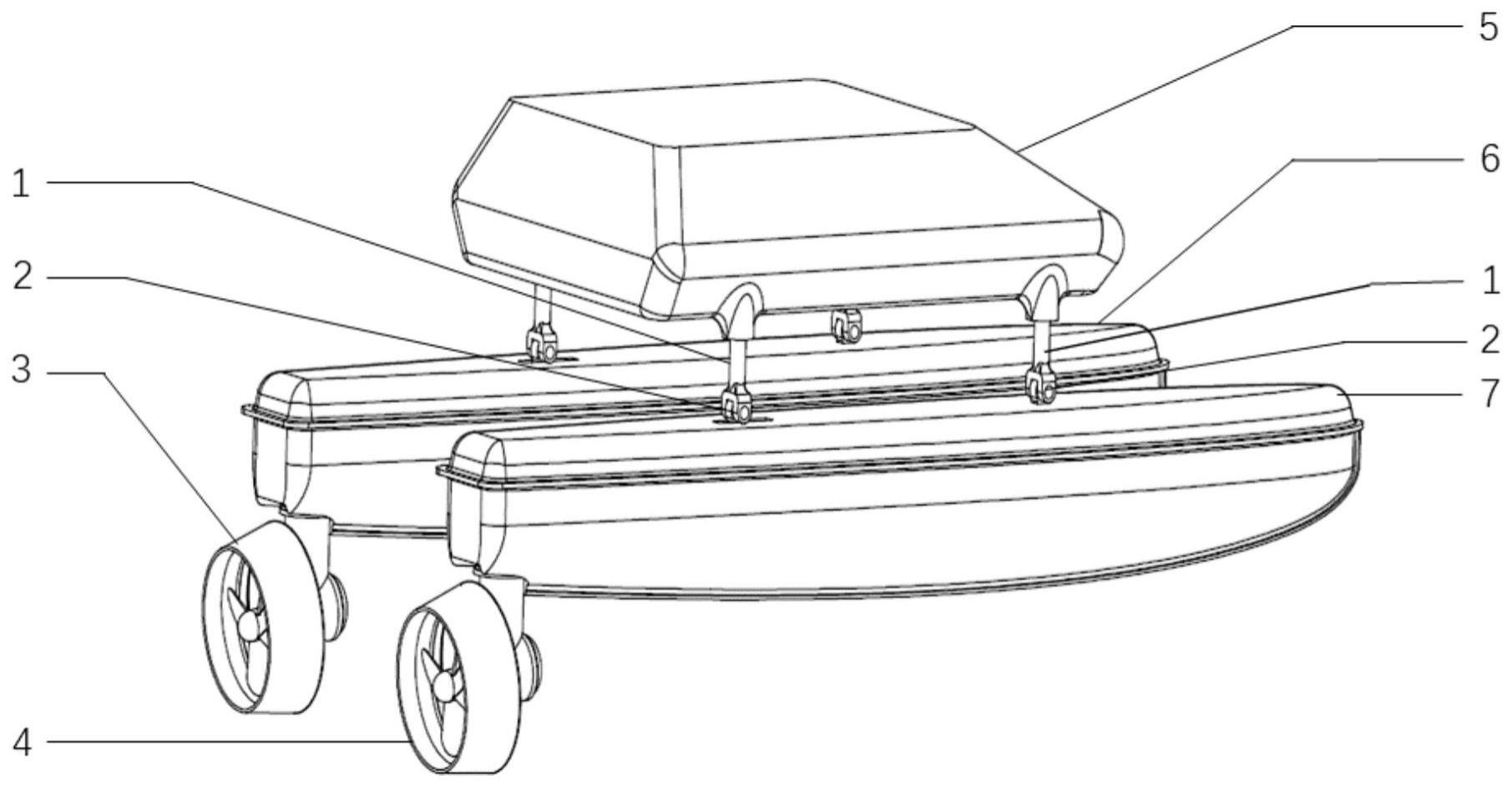
3、本发明第一方面公开了一种对波浪主动补偿的双体船,包括船舱、第一片体、第二片体、液压系统和驱动系统;
4、所述的液压系统包括液压执行器;
5、所述的船舱通过若干组液压执行器连接于第一片体与第二片体上方,液压执行器与船舱、第一片体和第二片体之间分别采取铰接连接;
6、所述的船舱设有姿态传感器;
7、所述的驱动系统包括电机与控制器;
8、所述的电机与液压系统连接,所述的控制器分别与电机和姿态传感器电气连接。
9、优选地,所述的液压系统还包括液压泵和油箱;所述的液压泵连接油箱和液压执行器,所述的电机通过联轴器与液压泵相连。基于液压泵与电机的摆放选择对应的联轴器,通常情况下应用直线式联轴器即可。
10、优选地,所述的液压执行器设置有2组,分别连接于船舱与第一片体以及船舱与第二片体之间;每1组液压执行器包括2个,沿第一片体或第二片体的长度方向间隔设置。
11、优选地,所述的液压执行器的端部通过铰链与船舱、第一片体和第二片体构成铰接。
12、优选地,所述的铰链包括设置于液压执行器端部的铰链头以及分别设置于船舱、第一片体和第二片体上的连接片,所述的铰链头与连接片铰接配合。
13、优选地,所述的铰链还包括底座,所述的底座分别设置于船舱、第一片体和第二片体表面,所述的连接片安装于底座上。
14、优选地,所述的电机设置于第一片体和第二片体内部。
15、优选地,所述的驱动系统还包括分别设置于第一片体和第二片体上的推进器,所述的推进器与电机连接。
16、优选地,所述的双体船为轴对称结构。
17、本发明第二方面公开了一种控制如上任一所述的对波浪主动补偿的双体船的方法,姿态传感器监测船舱的实时姿态并反馈至控制器,当船舱的实时姿态偏离设定姿态时,控制器指令电机驱动液压系统,液压执行器伸缩以补偿船舱的姿态偏移,使船舱恢复设定姿态。
18、本发明的工作原理为:
19、采取铰接形式连接的液压执行器(即形成铰接节点-液压执行器-铰接节点),能够允许船舱与第一片体/第二片体之间发生相对运动,使船舱能够根据海况实时调整以控制船体的倾斜角度。
20、采取姿态传感器配合控制器的使用,可以主动启用液压系统(控制对应位置的液压执行器伸缩)来调整船舱的姿态,从而最大限度地减少晃动。
21、与现有技术相比,本发明具有以下有益效果:
22、在中国专利cn202111485923.7公开的方案中,船体单元之间的缓冲连接装置和补偿装置主要依靠机械传动的伺服缸来实现。这种方式效率不高,且对能源的需求大,同时动态响应速度较慢。而本发明采用液压系统可以平滑调节输出力,同时响应速度更快,更节能。
23、中国专利cn201710487134.4公开的方案中,船尾u型支撑杆为刚性件、无法伸缩,所以该平台在补偿翻滚和起伏这两个自由度上存在不足。而本发明可实现对船舱的俯仰、翻滚和起伏三个自由度的补偿。
24、通过在船舱底部设置两个对称的片体,使得该双体船可以形成更宽的稳定基础,从结构设计上有效减轻了船舶在波浪中的晃动幅度。
25、液压系统通过液压执行器、液压泵和油箱并配合控制器以及姿态传感器等的联合使用,构成多组件协调工作,能够实时监测船舱的晃动情况并通过驱使液压执行器的运行,有效实现船舱姿态的控制。此外,铰链和液压执行器的连接机制允许船舱与片体之间产生相对运动,使片体能够根据海况实时调整,并控制船舱的倾斜角度,从而最大限度地减少晃动。通过调整液压执行器的长度,船体的倾斜角度可以根据不同海况和需求进行精确控制。这使得船舶适应性更强,可以适应不同水域和航行条件。
26、该双体船通常作为无人船使用。无人船体积小,成本低。同时可用遥控操控该双体船执行高风险任务,保护人员安全。该双体船结构以及主动补偿的方法在航行稳定性方面相较传统船舶有着明显的优势,为船舶工程领域带来了技术上的进步和改善,在海洋工程、旅游业、海洋研究以及其他需要稳定船只的领域具有广阔的应用前景。
技术特征:
1.一种对波浪主动补偿的双体船,其特征在于,包括船舱(5)、第一片体(6)、第二片体(7)、液压系统和驱动系统;
2.根据权利要求1所述的一种对波浪主动补偿的双体船,其特征在于,所述的液压系统还包括液压泵(12)和油箱(13);所述的液压泵(12)连接油箱(13)和液压执行器(1),所述的电机(16)通过联轴器(15)与液压泵(12)相连。
3.根据权利要求1所述的一种对波浪主动补偿的双体船,其特征在于,所述的液压执行器(1)设置有2组,分别连接于船舱(5)与第一片体(6)以及船舱(5)与第二片体(7)之间;每1组液压执行器(1)包括2个,沿第一片体(6)或第二片体(7)的长度方向间隔设置。
4.根据权利要求1所述的一种对波浪主动补偿的双体船,其特征在于,所述的液压执行器(1)的端部通过铰链(2)与船舱(5)、第一片体(6)和第二片体(7)构成铰接。
5.根据权利要求4所述的一种对波浪主动补偿的双体船,其特征在于,所述的铰链(2)包括设置于液压执行器(1)端部的铰链头(20)以及分别设置于船舱(5)、第一片体(6)和第二片体(7)上的连接片(21),所述的铰链头(20)与连接片(21)铰接配合。
6.根据权利要求5所述的一种对波浪主动补偿的双体船,其特征在于,所述的铰链(2)还包括底座(22),所述的底座(22)分别设置于船舱(5)、第一片体(6)和第二片体(7)表面,所述的连接片(21)安装于底座(22)上。
7.根据权利要求1所述的一种对波浪主动补偿的双体船,其特征在于,所述的电机(16)设置于第一片体(6)和第二片体(7)内部。
8.根据权利要求1所述的一种对波浪主动补偿的双体船,其特征在于,所述的驱动系统还包括分别设置于第一片体(6)和第二片体(7)上的推进器,所述的推进器与电机(16)连接。
9.根据权利要求1-8任一所述的一种对波浪主动补偿的双体船,其特征在于,所述的双体船为轴对称结构。
10.一种控制如权利要求1-9任一所述的对波浪主动补偿的双体船的方法,其特征在于,姿态传感器监测船舱(5)的实时姿态并反馈至控制器,当船舱(5)的实时姿态偏离设定姿态时,控制器指令电机(16)驱动液压系统,液压执行器(1)伸缩使船舱(5)恢复设定姿态。
技术总结
本发明属于船舶设计领域,具体涉及一种对波浪主动补偿的双体船及控制方法,包括船舱、第一片体、第二片体、液压系统和驱动系统;所述的液压系统包括液压执行器;所述的船舱通过若干组液压执行器连接于第一片体与第二片体上方,液压执行器与船舱、第一片体和第二片体之间分别采取铰接连接;所述的船舱设有姿态传感器;所述的驱动系统包括电机与控制器;所述的电机与液压系统连接,所述的控制器分别与电机和姿态传感器电气连接。与现有技术相比,本发明解决现有技术中在双体船航行中会受波浪影响而导致船舱发生晃动的缺陷,实现了对船舱的姿态进行主动补偿与控制,最大限度地减少船舱的晃动,提高船舶的航行稳定性。
技术研发人员:谢威,虞尧,沈君裕,张卫东,尹荣基,陆锦辉
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!