一种穿戴式自感应水下推进器及推进方法
本发明属于水下推进控制领域,具体涉及为一种穿戴式自感应水下推进器及推进方法。
背景技术:
1、水下推进器,是人们进行水下娱乐、水下勘探、水下考古寻宝、水下救援、水下设施维护、水下捕捞乃至水下军事活动的重要助手及工具之一。越来越多的水下推进器被投入市场,但目前市面上现有的水下推进器均为双手握控或单手指控方式进行操控,这种操控方式需要手参与控制,束缚了用户的双手,大大降低了用户的使用体验,且在特定领域无法满足用户水下摄影或水下持枪前进等灵活性较高的运动需求。
2、现有的提出替代手持式水下推进器的方案,大多存在操作不便,无法完全实现解放双手,缺乏灵活性和空间分配不合理等问题,如一种替代手持控制的方式,但该成果仍需使用拇指进行控制,无法实现完全解放双手的功能。如一种潜水水下推进器,可通过固定在潜水员下肢外侧,但该推进器需要电源,并需要将电源放入袋子中并穿戴在身上,将电源背在后背上。这种穿戴方式一定程度上解放了双手,但对推进器的操纵缺乏灵活性,同时电源箱设计在背部,与现有潜水设备如氧气瓶存在冲突。
技术实现思路
1、本发明所要解决的技术问题是:
2、为了避免现有技术的不足之处,本发明提供一种穿戴式自感应水下推进器及推进方法。
3、为了解决上述技术问题,本发明采用的技术方案为:
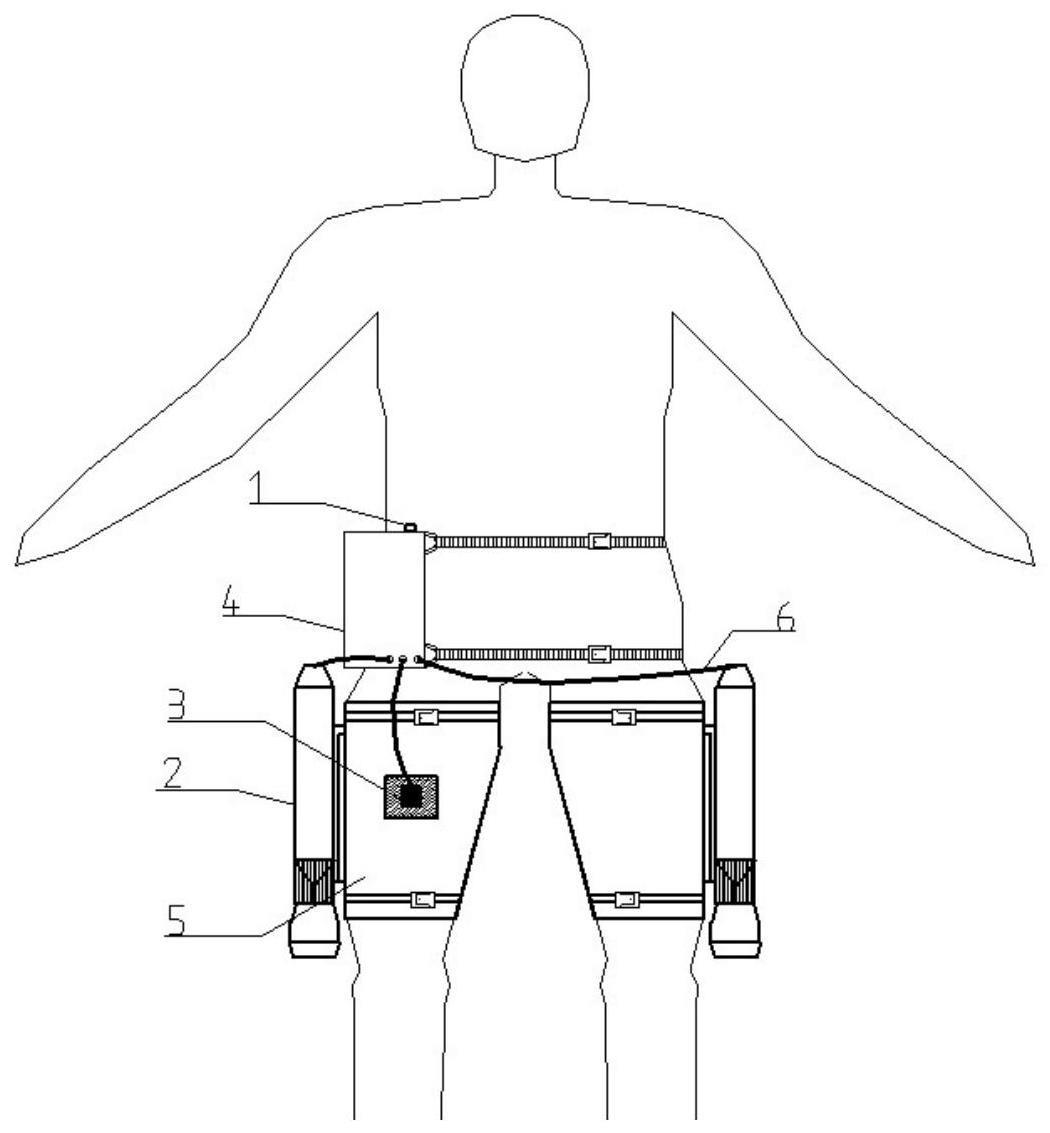
4、一种穿戴式自感应水下推进器,其特征在于包括:控制箱、腿部穿戴设备和水下推进器;
5、所述控制箱用于安装控制电路板和其供电模块,用于控制推进器;
6、所述腿部穿戴设备集成了姿态传感器与推进器固定架,姿态传感器与所述控制箱以防水线相连;
7、所述水下推进器固定于大腿处所述腿部穿戴设备,同时与所述控制箱以防水线连接。
8、本发明进一步的技术方案:在控制箱外部设置按钮,用于进入长距离航行模式和调换档位。
9、本发明进一步的技术方案:在控制箱一侧设置防水接口,用于与姿态传感器与水下推进器连接。
10、本发明进一步的技术方案:所述腿部穿戴装备由弹力布或弹性纤维制成。
11、本发明进一步的技术方案:在腿部穿戴装备一侧设置用于固定水下推进器的滑轨卡槽。
12、本发明进一步的技术方案:在水下推进器一侧设置与滑轨卡槽配合固定的滑轨卡槽。
13、本发明进一步的技术方案:在水下推进器另一侧设置滑翼,用以在推进器工作时保证人体的稳定性。
14、一种穿戴式自感应水下推进器的推进方法,其特征在于步骤如下:
15、步骤1:初始化,通过姿态传感器获取当前人体姿态及打腿频率,判断人体是否处于垂直于水面状态;
16、步骤2:默认进入灵活助游模式,用户可选择按下按键,进入长距离航行模式。根据按键操控进行挡位选择,并由微控制器或计算机控制推进器持续产生不同推力;
17、步骤3:姿态传感器检测腿部姿态及打腿频率变化,若产生信号持续五秒,则切换为灵活助游模式;
18、步骤4:根据打腿的幅度与频率不同,将其划分为三个档位,由姿态传感器进行数据采集,并由微控制器或计算机进行解算,之后控制推进器进行不同挡位的推力输出;
19、步骤5:当姿态传感器检测到腿部与水面接近垂直时,由微控制器或计算机控制推进器停止产生推力。
20、本发明进一步的技术方案:还提供一种安全模式,即增加一条安全线程,当用户处于紧急状态即身体接近垂直于水面时,由微控制器或计算机控制推进器停止输出推力。
21、本发明进一步的技术方案:步骤4控制推进器进行不同挡位的推力输出具体为:微控制器或计算机将当前输出的数值取滑动平均值后与预设值进行比对,判断挡位后进行信号输出控制推进器产生相应推力。
22、本发明的有益效果在于:
23、本发明提供的一种穿戴式自感应水下推进器及推进方法,通过采集腿部运动频率、幅度及姿态角,将其作为输入信号,控制推进器的输出功率,增加穿戴式推进器的灵活性;并通过合理规划微控制器、水下推进器及姿态传感器的位置、将电源集成在推进器中并在微控制器处集成按键等操控装置,减少穿戴、结构复杂度。解决现有替代手持式推进器方案中未完全解放双手的问题。
24、通过本发明所构思的以上技术方案与现有技术相比,具备以下的技术优点:
25、1.本发明仅需两个推进器、一个微控制器或计算机、一个姿态传感器,具有体积小、重量轻、成本低、操控简单等优势。
26、2.本发明通过将腿部姿态及打腿频率采集作为输入信号控制,解决了完全解放双手的问题。
27、3.本发明可通过实时采集腿部信号来控制推进器功率,解决了常见穿戴式水下推进器灵活性差的问题。
28、4.本发明提供了长距离航行和灵活助游两种控制模式,为用户提供了更多方案选择。
技术特征:
1.一种穿戴式自感应水下推进器,其特征在于包括:控制箱、腿部穿戴设备和水下推进器;
2.根据权利要求1所述一种穿戴式自感应水下推进器,其特征在于,在控制箱外部设置按钮,用于进入长距离航行模式和调换档位。
3.根据权利要求2所述一种穿戴式自感应水下推进器,其特征在于,在控制箱一侧设置防水接口,用于与姿态传感器与水下推进器连接。
4.根据权利要求1所述一种穿戴式自感应水下推进器,其特征在于,所述腿部穿戴装备由弹力布或弹性纤维制成。
5.根据权利要求4所述一种穿戴式自感应水下推进器,其特征在于,在腿部穿戴装备一侧设置用于固定水下推进器的滑轨卡槽。
6.根据权利要求4所述一种穿戴式自感应水下推进器,其特征在于,在水下推进器一侧设置与滑轨卡槽配合固定的滑轨卡槽。
7.根据权利要求4所述一种穿戴式自感应水下推进器,其特征在于,在水下推进器另一侧设置滑翼,用以在推进器工作时保证人体的稳定性。
8.一种穿戴式自感应水下推进器的推进方法,其特征在于步骤如下:
9.根据权利要求8所述一种穿戴式自感应水下推进器的推进方法,其特征在于,还提供一种安全模式,即增加一条安全线程,当用户处于紧急状态即身体接近垂直于水面时,由微控制器或计算机控制推进器停止输出推力。
10.根据权利要求8所述一种穿戴式自感应水下推进器的推进方法,其特征在于,步骤4控制推进器进行不同挡位的推力输出具体为:微控制器或计算机将当前输出的数值取滑动平均值后与预设值进行比对,判断挡位后进行信号输出控制推进器产生相应推力。
技术总结
本发明涉及一种穿戴式自感应水下推进器及推进方法,属于水下推进控制领域。穿戴式自感应水下推进器包括控制箱、腿部穿戴设备和水下推进器,控制箱用于控制推进器;腿部穿戴设备集成了姿态传感器与推进器固定架,姿态传感器与控制箱以防水线相连;水下推进器固定于大腿处腿部穿戴设备,同时与控制箱以防水线连接。通过采集腿部运动频率、幅度及姿态角,将其作为输入信号,控制推进器的输出功率,增加穿戴式推进器的灵活性;并通过合理规划微控制器、水下推进器及姿态传感器的位置、将电源集成在推进器中并在微控制器处集成按键等操控装置,减少穿戴、结构复杂度。解决现有替代手持式推进器方案中未完全解放双手的问题。
技术研发人员:杨锦帅,孙博洋,井安言,高剑
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!