一种面向高海况救援的精确伞降自主水下航行器的制作方法
本发明属于海上搜救设备,具体涉及一种面向高海况救援的精确伞降自主水下航行器。
背景技术:
1、海上救援是国家应急保障体系的重要组成部分,在远离海岸处发生的人员或装备落水事故,救援工作面临大水深、远航程、恶劣的气象水文、匮乏的通信手段和长时间目标搜寻等困难和挑战,尤其是在复杂危险海况下,现有船只、直升机、无人机等手段难以满足救援需求。
2、搜索目标、尽早发现目标并提供准确的目标位置信息,是实施救援的基本条件。目前,海上搜救主要采用救援直升机、救援船只等装备。海难经常发生在水文及气象条件恶劣的高海况、深远海环境中,在高海况条件下,直升机在近海面受高强度风浪的影响,自身的安全性很难保证;小型救援船只无法进入高海况区域;大型救援船只抵达高海况区域后,受海面风浪影响,目标搜索工作通常难以开展。
3、自主水下航行器作为一种新型无人装备,具备在水下长时间潜航并自主开展水下目标搜索的能力,一般由设备舱、控制舱、救援舱和推进舱组成,但自主水下航行器一般从船上布放,航行速度相对较低,抵达失事区域的时间较长,无法满足急救的需求。从固定翼飞机或直升机上空投自主水下航行器,在入水瞬间自主水下航行器需要承受较大的冲击过载,容易造成内部设备的损毁。
4、采用普通的降落伞空投自主水下航行器,其落点散布较大,无法保证降落在失事海域。可控翼伞作为一种飞行姿态受控的滑翔伞,可通过分离机构挂载自主水下航行器,组成可精确伞降的自主水下航行器。但是现有的分离机构,例如cn201510406496.7公开的“一种全机械式微小型抛投机器人降落伞自动分离机构”,其包括卡位头座、卡位头、复位弹簧、托板、导向柱、固定弹簧压板、动力弹簧、活动弹簧压板、轮毂、缓冲弹簧、绳扣和连接螺钉等部件,存在着结构复杂、可靠性低的问题;同时,该方案依靠重力的变化实现分离,而对于“雀降”滑翔入水的自主水下航行器,入水过程中重力变化并不显著,因而无法使用这种方案实现可靠的分离。
5、因此,有必要研制能适应复杂危险海况,具备远距离投送能力及水下自主作业能力的智能化救援装备。
技术实现思路
1、本发明提供一种面向高海况救援的精确伞降自主水下航行器,以解决现有救援装备无法快速准确抵近失事海域、无法长时间在水下实施目标搜索等深远海急救所需解决的问题。同时,本发明解决了现有可控翼伞与挂载设备联动技术中存在的结构复杂、可靠性低,联动性差的问题。
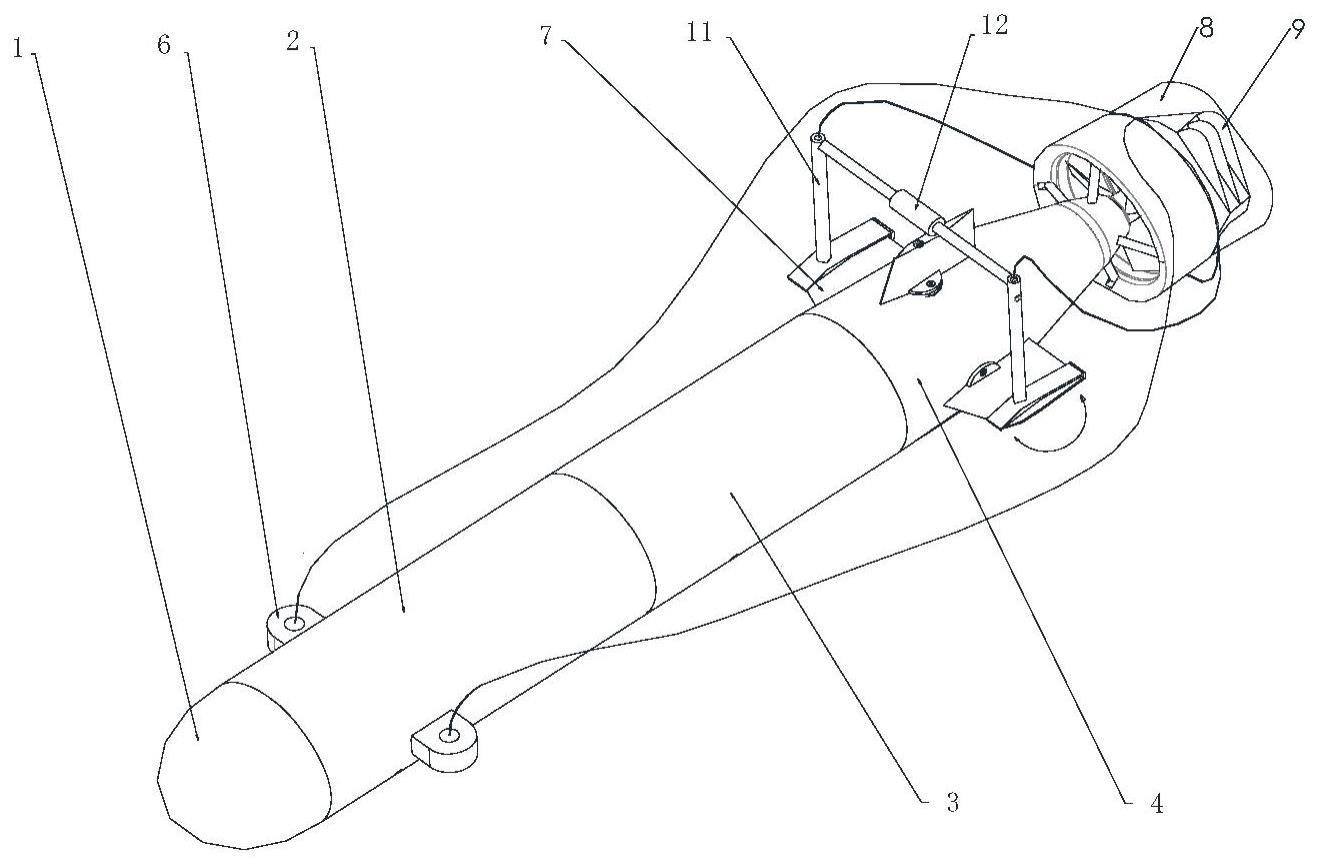
2、为达到本发明的目的,本发明提供的技术方案是:一种面向高海况救援的精确伞降自主水下航行器,由设备舱、控制舱、救援舱和推进舱组成,推进舱外侧设置有一对水平舵,其特征在于:还包括空投附件,所述控制舱的两侧设置有一对第二分离机构;所述推进舱中设置有第一线缆释放机构;
3、所述空投附件包含外壳和其内的可控翼伞,可控翼伞的四根伞绳设置于外壳外;
4、所述水平舵上跨设有收放支架,收放支架包括一对l型支撑杆和l型支撑杆中间设置有第一分离机构,可控翼伞后缘的左、右两侧的伞绳分别连接在l型支撑杆的转角处;l型支撑杆转角处内部有球铰链;
5、所述可控翼伞前缘左、右两侧的伞绳分别连接在控制舱两侧的第二分离机构上;
6、所述可控翼伞上的伞衣内部设置有第二线缆释放机构,第一线缆释放机构与第二线缆释放机构之间设置有通信线缆,第一线缆释放机构和第二线缆释放机构内部的通信线缆均采用由外向内的绕制方法绕制。
7、进一步的,上述第一分离机构包括套筒和一对l型支撑杆,一对l型支撑杆与套筒两端螺纹连接,套筒内固定设置有第一水激活电池和第一燃气发生器。
8、进一步的,上述第二分离机构包括支座、环形切割刀、翼伞前缘伞绳、定位销、推动活塞、第二燃气发生器、第二激活电池和固定块,所述支座上设有通孔,支座的外壁上、垂直于通孔的轴线方向分别设置有与通孔相交的定位销孔和贯通设置的伞绳安装孔,定位销孔内固定有定位销;所述环形切割刀水平设置于通孔内且其外缘固定设置于定位销上,定位销上设置有强度削弱槽;环形切割刀的中心刀口正对伞绳安装孔,翼伞前缘伞绳的末端穿设于伞绳安装孔和环形切割刀的中心刀口内;所述环形切割刀的外侧设置有穿设于通孔内的推动活塞,推动活塞的另一侧的支座内壁上嵌设有第二燃气发生器和第二激活电池,两者通过电缆连接,通孔的端部设置有密封板。
9、进一步的,上述翼伞前缘伞绳穿过伞绳安装孔,伞绳安装孔的孔口位置设置有固定块,伞绳与固定块胶粘,伞绳末端打结。
10、进一步的,上述通信线缆为光纤或金属导线,线缆外部为承力及保护层,内部为通电细缆。
11、与现有技术相比,本发明的有益效果:
12、1、精确伞降自主水下航行器作为无人救援装备,可在复杂危险海况条件下实施对落水人员及装备的搜索和救援,解决了高海况条件下人工救援在海面及水下作业难度大、危险性高、作业效率低等问题。精确伞降自主水下航行器集成了可控翼伞与自主水下航行器技术,将可控翼伞的远距离精确投送能力及快速性与自主水下航行器潜入水下工作、不受海况影响的特性相结合,可提高救援装备的适用性。
13、2、翼伞与自主水下航行器之间采用四点连接,采用分离机构保证在空中飞行过程中,伞绳与自主水下航行器可靠连接;在自主水下航行器入水后立即分离。分离可靠由以下结构点带来:第一分离机构与自主水下航行器的水平舵配合安装,并与翼伞的后缘伞绳连接,能在飞行过程保证对单侧或双侧后缘伞绳的操控,且能在入水过程中采用燃气弹射的方式与自主水下航行器分离;第二分离机构采用预埋环形切割刀的方法,在入水瞬间通过环形切割刀割断前缘伞绳,实现可靠分离。本发明的分离机构结构简单,由于机械部件少,基本杜绝了故障的发生。
14、3、本发明水平舵7上跨设有收放支架,收放支架上的l型支撑杆11转角处内部有球铰链,可使左右任意一侧水平舵能带动相应的l型支撑杆11在小角度(10°度以内)范围内独立转动,而不影响另一侧的l型支撑杆11,即可通过单侧水平舵7的转动带动单侧l型支撑杆11转动,进而拉下单侧翼伞后缘改变航向。使得本来用于水下航行操控的自主水下航行器的操舵系统(水平舵)可用于在空中飞行时对可控翼伞进行操控,可控翼伞不需要再配置一套导航控制系统及操控机构,而是借用了自主水下航行器本来仅用于水下操控的设备。
15、4、本发明的分离机构,既能连接又能分离,在“可控翼伞+自主水下航行器”组合体在空中飞行时,可保证可控翼伞与自主水下航行器的可靠连接,在自主水下航行器入水瞬间,分离机构的水激活电池启动,带动分离机构动作,实现自主水下航行器与可控翼伞的可靠分离。
16、4、本发明可采用直升机、固定翼飞机作为发射平台,在三级及以下海况下均可使用并可回收,在四级、五级海况下使用,不需要回收。自主水下航行器入水后,与漂浮在水面的翼伞之间有细缆实现有线通信,自主水下航行器与翼伞之间的细缆可无阻力释放,不承受拉力,可以保证自主水下航行器在水下搜索过程中与翼伞之间无相互运动干扰。
技术特征:
1.一种面向高海况救援的精确伞降自主水下航行器,由设备舱(1)、控制舱(2)、救援舱(3)和推进舱(4)组成,推进舱(4)外侧设置有一对水平舵(7),其特征在于:还包括空投附件,所述控制舱(2)的两侧设置有一对第二分离机构(6);所述推进舱(4)中设置有第一线缆释放机构(41);
2.根据权利要求1所述的一种面向高海况救援的精确伞降自主水下航行器其特征在于:所述第一分离机构(12)包括套筒(21)和一对l型支撑杆(11),一对l型支撑杆(11)与套筒(21)两端螺纹连接,套筒(21)内固定设置有第一水激活电池(22)和第一燃气发生器(23)。
3.根据权利要求2所述的一种面向高海况救援的精确伞降自主水下航行器其特征在于:所述第二分离机构(6)包括支座(31)、环形切割刀(32)、翼伞前缘伞绳(33)、定位销(34)、推动活塞(35)、第二燃气发生器(36)、第二激活电池(37)和固定块(38),所述支座(31)上设有通孔,支座(31)的外壁上、垂直于通孔的轴线方向分别设置有与通孔相交的定位销孔和贯通设置的伞绳安装孔,定位销孔内固定有定位销(34);所述环形切割刀(32)水平设置于通孔内且其外缘固定设置于定位销(34)上,定位销(34)上设置有强度削弱槽;环形切割刀(32)的中心刀口正对伞绳安装孔,翼伞前缘伞绳(33)的末端穿设于伞绳安装孔和环形切割刀(32)的中心刀口内;所述环形切割刀(32)的外侧设置有穿设于通孔内的推动活塞(35),推动活塞(35)的另一侧的支座(31)内壁上嵌设有第二燃气发生器(36)和第二激活电池(37),两者通过电缆连接,通孔的端部设置有密封板(39)。
4.根据权利要求3所述的一种面向高海况救援的精确伞降自主水下航行器其特征在于:所述翼伞前缘伞绳(33)穿过伞绳安装孔,伞绳安装孔的孔口位置设置有固定块(38),伞绳与固定块(38)胶粘,伞绳末端打结。
5.根据权利要求4所述的一种面向高海况救援的精确伞降自主水下航行器其特征在于:所述通信线缆(42)为光纤或金属导线,线缆外部为承力及保护层,内部为通电细缆。
技术总结
本发明涉及一种面向高海况救援的精确伞降自主水下航行器。由设备舱、控制舱、救援舱和推进舱组成,推进舱外侧设置有一对水平舵,还包括空投附件,所述控制舱的两侧设置有一对第二分离机构;所述空投附件包含外壳和其内的可控翼伞,可控翼伞的四根伞绳设置于外壳外;所述水平舵上跨设有收放支架,收放支架包括一对L型支撑杆和L型支撑杆中间设置有第一分离机构。本发明可在复杂危险海况条件下实施对落水人员及装备的搜索和救援,分离机构结构简单,基本杜绝了故障的发生;实现自主水下航行器与可控翼伞的可靠分离;可采用直升机、固定翼飞机作为发射平台;可以保证自主水下航行器在水下搜索过程中与翼伞之间无相互运动干扰。
技术研发人员:王锋辉,陈建峰,李国良,吴佐辅,雷娟,张凯源,黄江成
受保护的技术使用者:西安天和海防智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!