一种智能水域垃圾清理检测生态维护船
本发明涉及水域清洁维护,具体涉及一种智能水域垃圾清理检测生态维护船。
背景技术:
1、在小型水域水面垃圾的清洁工作中通常采用人工打捞或人工与水面垃圾打捞船结合的方式治理。市场上水面垃圾清洁船的价格在两万元到二十万元之间,总体开销大,且人工打捞具一定危险性。现今的大型水域水面垃圾清理装置较多,发展较为成熟但成本高,噪音污染和空气污染大,不适宜在小型水面投用。
2、如cn112758269a所示的维护船,虽然设置了双目摄像头,但仅作为信息提取,在发现垃圾前和发现垃圾后,船整体的运动水平保持一致,容易造成电量的浪费。
技术实现思路
1、针对现有技术存在的不足,本发明提出一种智能水域垃圾清理检测生态维护船,以解决上述背景技术中提到的船在发现垃圾前后运动水平保持一致容易造成电量的浪费的技术问题。
2、为解决该技术问题,本发明所采用的技术方案是:
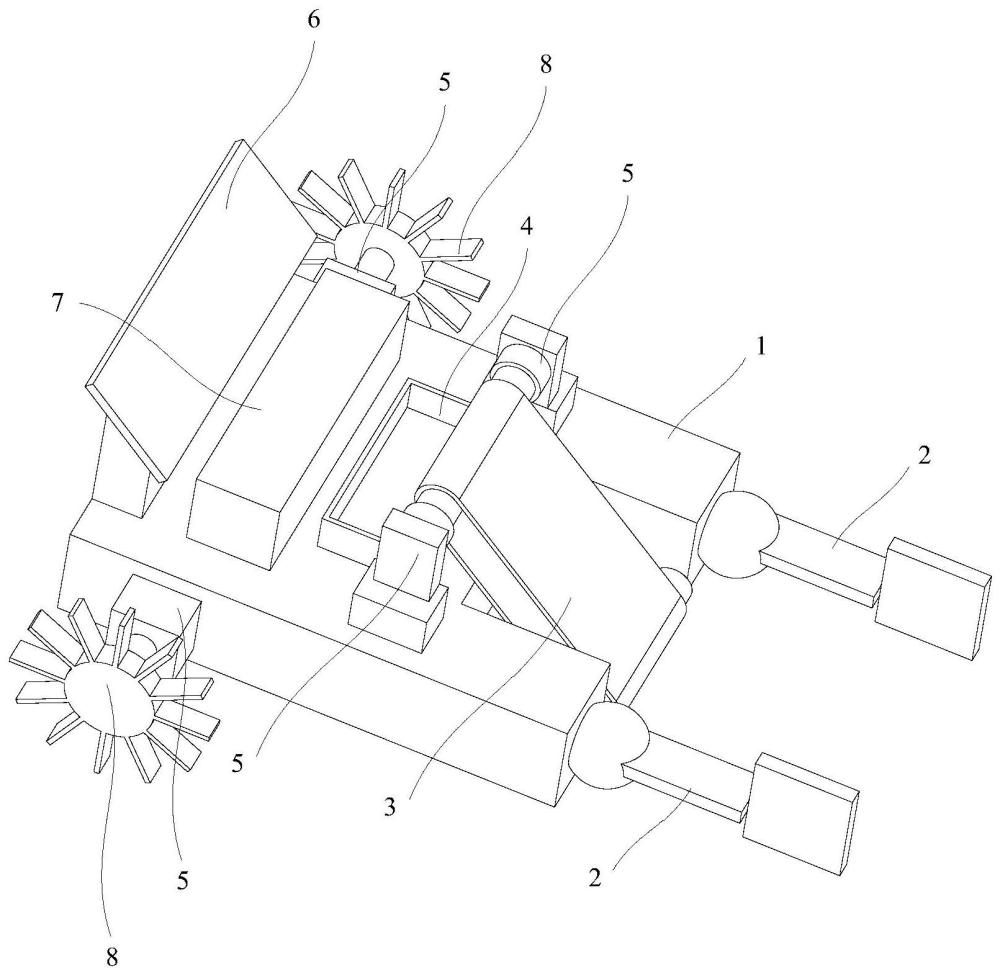
3、一种智能水域垃圾清理检测生态维护船,包括船体、引流拨片、传送带、存储箱、机器视觉模块和主控板;
4、所述船体前方设有引流板,所述引流板通过电机控制;
5、所述船体后方设有垃圾采集口,所述垃圾采集口上设有所述传送带,所述传送带通过电机控制;所述存储箱设于所述船体后方,所述传送带能将垃圾传送至所述存储箱内;
6、所述机器视觉模块通过设于所述船体上,所述主控板分别和所述机器视觉模块、所述传送带的电机电连接,所述主控板能通过所述机器视觉模块传送的信号控制所述传送带的转动情况。
7、进一步地,所述船体还设有蓝牙模块,所述主控板能通过蓝牙模块和手机app通信。
8、进一步地,所述船体还设有姿态传感器模块;所述船体上还设有三轴陀螺仪,所述姿态传感器模块能检测船体的震动和姿态变化,测量三轴陀螺仪的数值,并将数据传送给所述主控板,由所述主控板调整船体的电机和舵机。
9、进一步地,当所述姿态传感器模块检测到的数值大于预定值时,将数据通过所述蓝牙模块发送至手机app端。
10、进一步地,所述船体还设有蜂鸣器,所述蜂鸣器和所述主控板电连接,当所述姿态传感器模块检测到的数值大于预定值时,所述主控板控制所述蜂鸣器发声。
11、进一步地,所述船体还设有tds水质检测模块;所述tds水质检测模块能将检测信息通过所述蓝牙模块发送给手机app。
12、进一步地,所述船体还设有显示屏,所述显示屏能显示所述主控板受到的所述姿态传感器模块传送的姿态角度值,以及所述tds模块的tds值。
13、进一步地,所述船体还设有红外避障系统;所述船体避障系统能通过红外传感器将障碍信息传送给所述主控板,并通过所述主控板调整所述船体的运动。
14、进一步地,还设有风速传感器;所述风速传感器与所述主控板电连接,并能将检测到的风速信息传递给所述主控板,所述主控板根据接收到的信号调整船体的运动速度。
15、进一步地,所述存储箱内还设有装满传感器;所述装满传感器和所述主控板电连接,并能在所述存储箱装满后通过所述主控板将信息发送给app端。
16、与现有技术相比,本申请的进步之处在于:
17、通过机器视觉模块,当机器视觉模块识别到前方有障碍物时,传送带为正常工作效率,如未识别到水面垃圾则处低功率状态,以达到节省电量,提高续航能力。
技术特征:
1.一种智能水域垃圾清理检测生态维护船,其特征在于,包括船体、引流拨片、传送带、存储箱、机器视觉模块和主控板;
2.根据权利要求1所述的一种智能水域垃圾清理检测生态维护船,其特征在于,所述船体还设有蓝牙模块,所述主控板能通过蓝牙模块和手机app通信。
3.根据权利要求2所述的一种智能水域垃圾清理检测生态维护船,其特征在于,所述船体还设有姿态传感器模块;所述船体上还设有三轴陀螺仪,所述姿态传感器模块能检测船体的震动和姿态变化,测量三轴陀螺仪的数值,并将数据传送给所述主控板,由所述主控板调整船体的电机和舵机。
4.根据权利要求3所述的一种智能水域垃圾清理检测生态维护船,其特征在于,当所述姿态传感器模块检测到的数值大于预定值时,将数据通过所述蓝牙模块发送至手机app端。
5.根据权利要求3所述的一种智能水域垃圾清理检测生态维护船,其特征在于,所述船体还设有蜂鸣器,所述蜂鸣器和所述主控板电连接,当所述姿态传感器模块检测到的数值大于预定值时,所述主控板控制所述蜂鸣器发声。
6.根据权利要求5所述的一种智能水域垃圾清理检测生态维护船,其特征在于,所述船体还设有tds水质检测模块;所述tds水质检测模块能将检测信息通过所述蓝牙模块发送给手机app。
7.根据权利要求6所述的一种智能水域垃圾清理检测生态维护船,其特征在于,所述船体还设有显示屏,所述显示屏能显示所述主控板受到的所述姿态传感器模块传送的姿态角度值,以及所述tds模块的tds值。
8.根据权利要求7所述的一种智能水域垃圾清理检测生态维护船,其特征在于,所述船体还设有红外避障系统;所述船体避障系统能通过红外传感器将障碍信息传送给所述主控板,并通过所述主控板调整所述船体的运动。
9.根据权利要求8所述的一种智能水域垃圾清理检测生态维护船,其特征在于,还设有风速传感器;所述风速传感器与所述主控板电连接,并能将检测到的风速信息传递给所述主控板,所述主控板根据接收到的信号调整船体的运动速度。
10.根据权利要求9所述的一种智能水域垃圾清理检测生态维护船,其特征在于,所述存储箱内还设有装满传感器;所述装满传感器和所述主控板电连接,并能在所述存储箱装满后通过所述主控板将信息发送给app端。
技术总结
本发明提供了一种智能水域垃圾清理检测生态维护船,包括船体、引流拨片、传送带、存储箱、机器视觉模块和主控板;船体前方设有引流板,引流板通过电机控制;船体后方设有垃圾采集口,垃圾采集口上设有传送带,传送带通过电机控制;存储箱设于船体后方,传送带能将垃圾传送至存储箱内;机器视觉模块通过设于船体上,主控板分别和机器视觉模块、传送带的电机电连接,主控板能通过机器视觉模块传送的信号控制引流拨片和传送带的转动情况。上述的智能水域垃圾清理检测生态维护船能调整发现垃圾前后的船体的用电情况,减少电量的浪费。
技术研发人员:陈义,刘鑫鑫,夏远平
受保护的技术使用者:重庆电子工程职业学院
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!