一种自适应变形船舶结构体及其形变控制方法
本发明涉及船舶配套设施,具体涉及一种自适应变形船舶结构体及其形变控制方法。
背景技术:
1、船体型线(几何外形)与船体性能息息相关,许多中高速船舶在型线设计阶段以满足单一工况需求为主,设计完成后船型固定不变。在“航行环境-船体型线-性能目标”三者关系中,固定船体型线无法在多种航行环境下保持较好的性能目标。根据已有研究,部分船体外形(如球鼻艏,舵叶,船体表面鼓包等)的最优型线随环境变化会产生明显区别。以环境参数为导向,根据周围流场自适应改变船体结构几何外形成为船体结构设计新方向。
2、在与船舶设计相近的飞行器设计领域,根据飞行状态改变飞机自身几何外形的“变形机翼”、“变形飞机”等研究已得到蓬勃发展。
3、形状记忆合金(后文称sma)材料如ni-ti合金具有极佳的形状记忆效应,经过形状训练后具有“双程记忆效应”,可通过电流控制sma丝温度,通过温度的改变影响驱动器直线伸缩长度。由于sma驱动器体积小、质量轻、输出大、便于布置等优势在各类型变形结构研究中都被认为是较为优秀的驱动器。
技术实现思路
1、本发明的目的在于克服上述技术不足,提供一种自适应变形船舶结构体及其形变控制方法,解决现有技术中自适应变形船舶结构体的驱动件驱动控制精度低且不易安装的技术问题。
2、为达到上述技术目的,本发明采取了以下技术方案:
3、第一方面,本发明提供了一种自适应变形船舶结构体,包括:结构体和驱动件,所述结构体包括固定部和活动部,所述驱动件与所述活动部连接,用于提供一个使活动部相对固定部运动的驱动力。
4、在一些实施例中,所述活动部为伸缩组件,所述驱动件设置于所述活动部和所述固定部的中部。
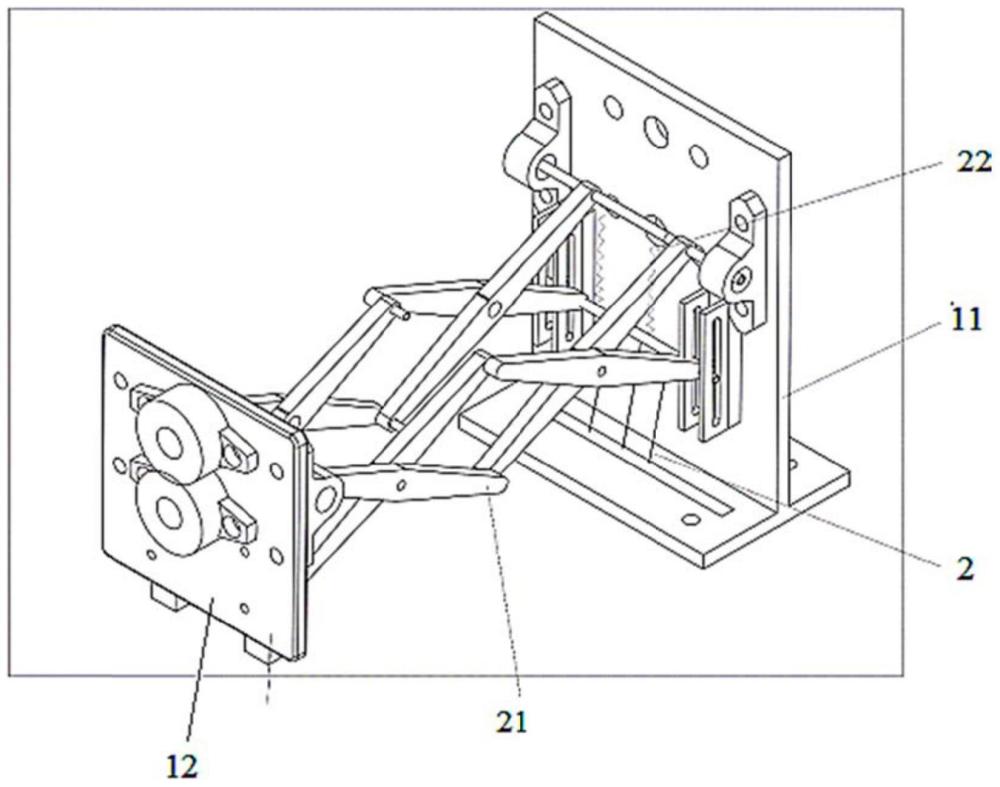
5、在一些实施例中,所述驱动件还包括位移放大装置和偏置弹簧,所述位移放大装置一端固定连接于所述固定部、另一端与所述活动部固定连接,所述位移放大装置为剪叉伸缩组件;所述偏置弹簧一端连接于所述固定部、另一端连接于所述活动部。
6、在一些实施例中,还包括柔性蒙皮,所述柔性蒙皮包覆于所述结构体和所述驱动体外表面。
7、第二方面,本发明还提供了一种自适应变形船舶结构体的形变方法,应用于如上述任一项所述的自适应变形船舶结构体,所述形变方法包括:
8、获取所述驱动件内sma材料的本构参数,并根据所述本构参数确定结构体的系统状态方程,所述系统状态方程包括所述驱动件的温度与应力应变之间的关联关系、所述驱动件电压与温度之间的关系、所述驱动件应力与载荷之间的关系、所述驱动件应变与形变量之间的关系以及所述结构体形变量与外载荷之间的关系;
9、以所述结构体的形变量为目标,以所述驱动件的电压和结构体目标形变量为条件,构建pid-逆迟滞组合控制算法模型,并基于所述系统状态方程采用预设优化算法对所述pid-逆迟滞组合控制算法模型的参数进行辨识,得到完备的pid-逆迟滞组合控制模型;
10、根据所述完备的pid-逆迟滞组合控制模型,确定所述驱动件对应的实时电压;
11、根据所述实时电压,调节所述驱动件的驱动力,根据所述驱动力,控制所述结构体的变形量。
12、在一些实施例中,所述驱动件的温度与应力应变之间的关联关系可通过如下公式表示:
13、σ-σ0=e(ε-ε0)+θ(t-t0)+ω(ξ-ξ0)
14、其中,σ为应力,σ0为初始应力,ε为应变,ε0为初始应变,t为温度,t0为初始温度,ξ为相变量,ξ0为初始相变量,e为模量,θ为热系数,ω为相变系数;
15、所述驱动件电压与温度之间的关系可通过如下公式表示:
16、
17、其中,m为驱动件质量,cwire为驱动件的热容值,为驱动件温度增量项,ewire为热辐射项,uwire为焦耳热项,qwire为对流热项;hsma为热焓值,为相变量增量;
18、所述驱动件应力与载荷之间的关系可通过如下公式表示:
19、
20、其中,n为驱动器内sma丝匝数匝数,σ为应力,a为单匝横截面积,k为偏置弹簧系数,θ为驱动件结构与垂直面夹角,ε为应变,fout为载荷;
21、所述驱动件应变与形变量之间的关系可通过如下公式表示:
22、
23、其中,ε为应变,l为驱动件结构的长度,θ为驱动件结构与垂直面夹角,y为结构体形变量。
24、在一些实施例中,所述以所述结构体的形变量为目标,以所述驱动件的电压和结构体目标形变量为条件,构建pid-逆迟滞组合控制算法模型,包括:
25、根据所述系统状态方程,确定所述结构体变形量与电压之间的迟滞环;
26、根据所述迟滞环,采用预设群优化算法辨识所述结构体变形量与电压之间关系的迟滞模型参数;
27、基于所述迟滞模型,构建pid-逆迟滞组合控制算法模型。
28、在一些实施例中,所述基于所述系统状态方程采用优化算法对所述pid-逆迟滞组合控制算法模型的参数进行辨识,得到完备的pid-逆迟滞组合控制模型,包括:
29、基于所述系统状态方程,以最小时间误差积分准则为目标,对构建的pid-逆迟滞组合控制算法模型的参数进行辨识。
30、在一些实施例中,根据所述训练完备的pid-逆迟滞组合控制模型,确定所述驱动件对应的实时电压,包括:
31、获取所述结构体的实时变形状态和实时环境状态,所述变形状态包括当前实时电流、目标位移、实际位移、实时偏差和当前形变量目标;
32、判断时间t时刻和时间t+1时刻对应的实时变性状态和实时环境状态是否一致;
33、若不一致,则根据所述实时变形状态和实时环境状态更新所述系统状态方程,并采用更新后的所述系统状态方程对构建的pid-逆迟滞组合控制算法模型的参数进行辨识,并更新参数;
34、根据基于所述实时变形状态和实时环境状态确定的pid-逆迟滞组合控制算法模型,确定所述驱动件对应的实时电压。
35、与现有技术相比,本发明提供的自适应变形船舶结构体及其形变控制方法,首先通过提供一种由驱动件驱动其变形的结构体,实现结构体在不同的环境下始终保持最优水动力性能的目的。同时建立实际载荷下的驱动件-变形结构整体系统状态方程,数学建模更为精确,基于此得出的控制算法更为可靠。
技术特征:
1.一种自适应变形船舶结构体,其特征在于,包括:结构体和驱动件,所述结构体包括固定部和活动部,所述驱动件与所述活动部连接,用于提供一个使活动部相对固定部运动的驱动力。
2.根据权利要求1所述的自适应变形船舶结构体,其特征在于,所述驱动件设置于所述活动部和所述固定部的中部。
3.根据权利要求1所述的自适应变形船舶结构体,其特征在于,所述驱动件为sma驱动器。
4.根据权利要求2所述的自适应变形船舶结构体,其特征在于,所述驱动件还包括位移放大装置和偏置弹簧,所述位移放大装置一端固定连接于所述固定部、另一端与所述活动部固定连接,所述位移放大装置为剪叉伸缩组件;所述偏置弹簧一端连接于所述固定部、另一端连接于所述活动部。
5.根据权利要求1所述的自适应变形船舶结构体,其特征在于,还包括柔性蒙皮,所述柔性蒙皮包覆于所述结构体和所述驱动体外表面。
6.一种自适应变形船舶结构体的形变方法,应用于如权利要求1-5任一项所述的自适应变形船舶结构体,其特征在于,所述形变方法包括:
7.根据权利要求6所述的自适应变形船舶结构体的形变方法,其特征在于,所述驱动件的温度与应力应变之间的关联关系可通过如下公式表示:
8.根据权利要求6所述的自适应变形船舶结构体的形变方法,其特征在于,所述以所述结构体的形变量为目标,以所述驱动件的电压和结构体目标形变量为条件,构建pid-逆迟滞组合控制算法模型,包括:
9.根据权利要求1所述的自适应变形船舶结构体的形变方法,其特征在于,所述基于所述系统状态方程采用优化算法对所述pid-逆迟滞组合控制算法模型的参数进行辨识,得到完备的pid-逆迟滞组合控制模型,包括:
10.根据权利要求9所述的自适应变形船舶结构体的形变方法,其特征在于,根据所述训练完备的pid-逆迟滞组合控制模型,确定所述驱动件对应的实时电压,包括:
技术总结
本发明公开了一种自适应变形船舶结构体及其形变控制方法,包括:结构体和驱动件,结构体包括固定部和活动部,驱动件与活动部连接,用于提供一个使活动部相对固定部运动的驱动力。以及获取SMA的本构参数,根据本构参数确定结构体的系统状态方程,以结构体的形变量为目标,以驱动件的电压和结构体目标形变量为条件,构建PID‑逆迟滞组合控制算法模型,基于系统状态方程对控制算法模型的参数进行辨识,得到完备的PID‑逆迟滞组合控制模型;根据完备的PID‑逆迟滞组合控制模型,确定驱动件对应的实时电压;根据实时电压,调节驱动件的驱动力,根据驱动力,控制所述结构体的变形量。本发明解决了自适应变形船舶结构体的驱动件驱动控制精度低且不易安装的技术问题。
技术研发人员:刘祖源,吕俊,冯佰威,常海超,詹成胜
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!