一种仿生水母水下机器人
本技术属于水下机器人,具体涉及一种仿生水母水下机器人。
背景技术:
1、水下机器人是海洋中水质检测、海洋救援探测、海洋生态农场中重要的应用工具,从仿生机构学与运动学角度而言,水母具有优良的形体结构与运行形态,仿生水母机器人作为水下机器人和仿生机器人的结合体,以水母为仿生蓝本的水下仿生机器人具有较高的研究价值。但现有技术中的仿生水母水下机器人为实现机器人的推进,大多采用伸缩杆反复的伸出/收缩动作或采用电机反复的正反转驱动“水母触须”做展开收回运动,从而实现整个机器人的推进。在实际的应用中,采用上述伸缩杆或电机的正反转实现机器人的推进的方式,反复的伸缩、正反转交替工作,使得伸缩杆或电机的使用寿命明显降低,因水下机器人长期在海洋中使用,需要对驱动部件进行防水密封,拆卸、维护、更换部件较为麻烦、成本较高,因此保证驱动部件的使用寿命是亟需解决的问题。
技术实现思路
1、本实用新型的目的是克服现有技术中存在的驱动部件的使用寿命较短、控制繁琐的缺陷,提供了一种使用寿命长、方便控制的仿生水母水下机器人。
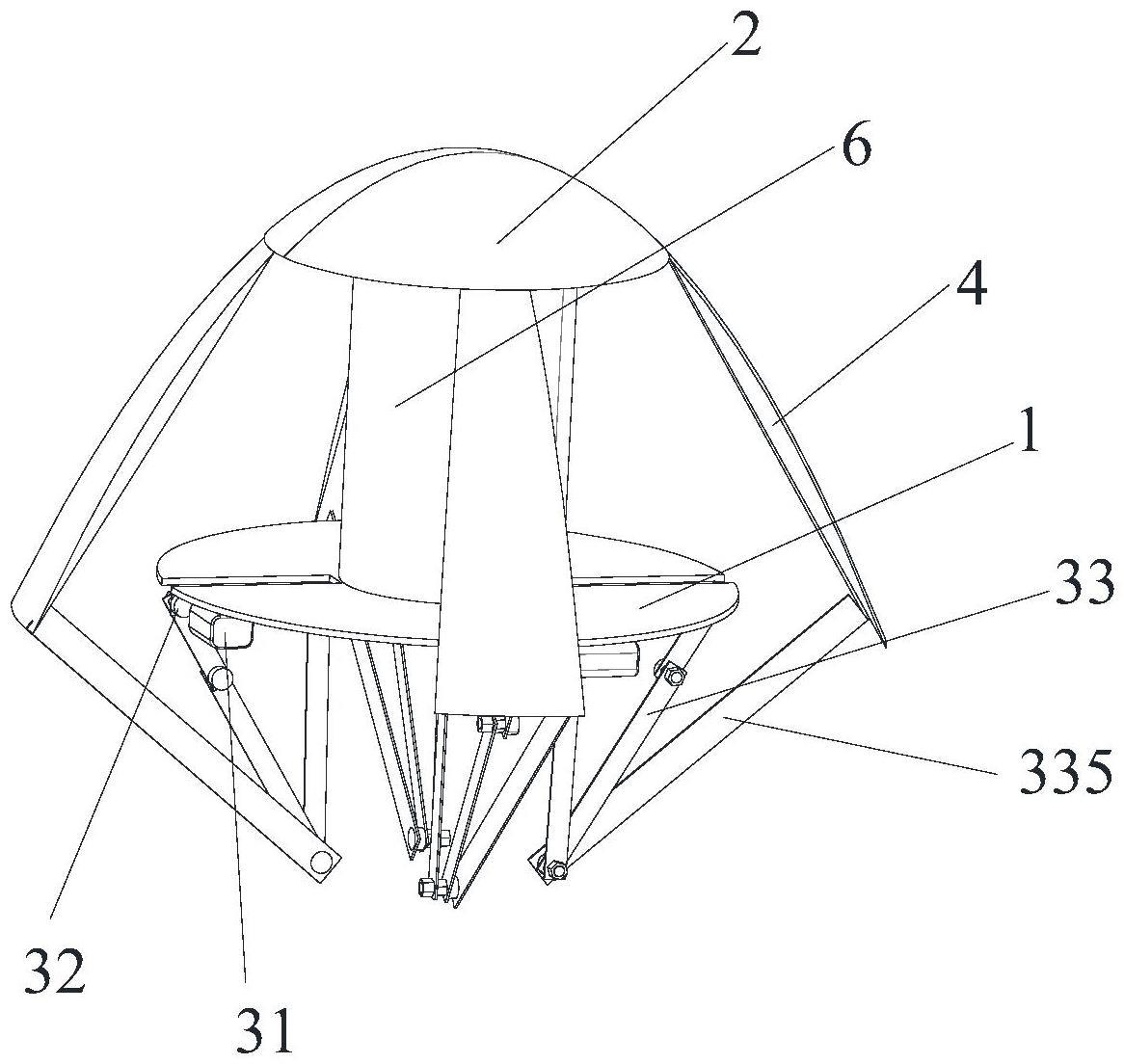
2、本实用新型解决其技术问题所采用的技术方案是:一种仿生水母水下机器人,包括圆盘基板、位于所述圆盘基板上端面上方的半球形水母顶板、安装在所述圆盘基板下端面上的至少四组驱动传动机构以及与所述驱动传动机构配合安装的水母摆动叶片;所述水母摆动叶片远离所述驱动传动机构的一端与所述半球形水母顶板转动连接;
3、所述驱动传动机构包括固定安装在所述圆盘基板下端面上的驱动电机和通过传动机构与所述驱动电机传动连接的连杆组件;所述水母摆动叶片做展开运动时所述驱动电机的旋转方向与所述水母摆动叶片做收缩运动时所述驱动电机的旋转方向一致。
4、进一步地,所述连杆组件包括安装在所述圆盘基板下端面上的固定杆,所述固定杆的两端分别转动连接有第一连杆和第二连杆;所述第一连杆与所述固定杆的连接端与所述传动机构的输出轴同轴设置,所述第一连杆远离所述固定杆的一端与所述第二连杆远离所述固定杆的一端之间转动安装有第三连杆;
5、所述第二连杆的长度大于所述第三连杆的长度,所述第三连杆的长度大于所述第一连杆的长度。
6、进一步地,所述连杆组件还包括转动连接在所述第二连杆与所述第三连杆的连接处的推杆,所述推杆远离所述第二连杆与第三连杆的连接处的端部与所述水母摆动叶片固定连接。
7、进一步地,所述传动机构包括与所述驱动电机的输出轴同轴设置有主动齿轮和与所述主动齿轮外啮合配合连接的从动齿轮。
8、进一步地,所述水母摆动叶片对应的所述圆盘基板上开设有槽口;
9、当所述水母摆动叶片处于展开状态时,所述第一连杆、第三连杆以及水母摆动叶片处于所述槽口内;
10、当所述水母摆动叶片处于收缩状态时,所述第一连杆、第三连杆以及水母摆动叶片处于所述槽口外。
11、进一步地,所述第一连杆和所述第二连杆与所述固定杆的连接处均位于所述槽口对应的圆盘基板上。
12、进一步地,还包括用于装载电源的电源套筒,所述电源套筒与所述圆盘基板的上端面固定安装。
13、更进一步地,所述水母摆动叶片的外壁面为弧形面,所述水母摆动叶片的两端厚度小于其中间厚度。
14、本实用新型的一种仿生水母水下机器人的有益效果是:
15、1、采用本实用新型中的驱动传动机构,驱动电机只需要做单一方向的旋转运动,即可实现叶片的展开/收缩动作,避免了现有技术中需要电动推杆反复进行伸缩运动或驱动电机反复进行正反转交替运动的控制麻烦、使用寿命较短的问题。且只需要采用较低成本的驱动电机就可实现机器人的稳定、长期的运行,轻巧灵活、成本较低。
16、2、本实用新型采用至少四组驱动传动机构且每组驱动传动机构均可独立控制,能够根据实际需要控制不同位置的驱动传动机构运动实现该机器人在水下的多角度换向。
17、3、本实用新型的驱动传动机构采用齿轮、连杆组件传动,噪音较小,进一步地保证运行的稳定性。
技术特征:
1.一种仿生水母水下机器人,其特征在于:包括圆盘基板(1)、位于所述圆盘基板(1)上端面上方的半球形水母顶板(2)、安装在所述圆盘基板(1)下端面上的至少四组驱动传动机构(3)以及与所述驱动传动机构(3)配合安装的水母摆动叶片(4);所述水母摆动叶片(4)远离所述驱动传动机构(3)的一端与所述半球形水母顶板(2)转动连接;
2.根据权利要求1所述的一种仿生水母水下机器人,其特征在于:所述连杆组件(33)包括安装在所述圆盘基板(1)下端面上的固定杆(331),所述固定杆(331)的两端分别转动连接有第一连杆(332)和第二连杆(333);所述第一连杆(332)与所述固定杆(331)的连接端与所述传动机构(32)的输出轴同轴设置,所述第一连杆(332)远离所述固定杆(331)的一端与所述第二连杆(333)远离所述固定杆(331)的一端之间转动安装有第三连杆(334);
3.根据权利要求2所述的一种仿生水母水下机器人,其特征在于:所述连杆组件(33)还包括转动连接在所述第二连杆(333)与所述第三连杆(334)的连接处的推杆(335),所述推杆(335)远离所述第二连杆(333)与第三连杆(334)的连接处的端部与所述水母摆动叶片(4)固定连接。
4.根据权利要求1所述的一种仿生水母水下机器人,其特征在于:所述传动机构(32)包括与所述驱动电机(31)的输出轴同轴设置有主动齿轮(321)和与所述主动齿轮(321)外啮合配合连接的从动齿轮(322)。
5.根据权利要求3所述的一种仿生水母水下机器人,其特征在于:所述水母摆动叶片(4)对应的所述圆盘基板(1)上开设有槽口(5);
6.根据权利要求5所述的一种仿生水母水下机器人,其特征在于:所述第一连杆(332)和所述第二连杆(333)与所述固定杆(331)的连接处均位于所述槽口(5)对应的圆盘基板(1)上。
7.根据权利要求1所述的一种仿生水母水下机器人,其特征在于:还包括用于装载电源的电源套筒(6),所述电源套筒(6)与所述圆盘基板(1)的上端面固定安装。
8.根据权利要求1所述的一种仿生水母水下机器人,其特征在于:所述水母摆动叶片(4)的外壁面为弧形面,所述水母摆动叶片(4)的两端厚度小于其中间厚度。
技术总结
本技术属于水下机器人技术领域,具体涉及一种仿生水母水下机器人包括圆盘基板、位于圆盘基板上端面上方的半球形水母顶板、安装在圆盘基板下端面上的至少四组驱动传动机构以及与驱动传动机构配合安装的水母摆动叶片;水母摆动叶片远离驱动传动机构的一端与半球形水母顶板转动连接;水母摆动叶片做展开运动时驱动电机的旋转方向与水母摆动叶片做收缩运动时驱动电机的旋转方向一致。本技术采用本技术中的驱动传动机构,驱动电机只需要做单一方向的旋转运动,即可实现叶片的展开/收缩动作,避免了现有技术中需要电动推杆反复进行伸缩运动或驱动电机反复进行正反转交替运动的控制麻烦、使用寿命较短的问题。
技术研发人员:李松,宋雲昊,曹建胜,卢正东,梅素人,马圣情,于孔祥,胡学友,付文俊,李铁群
受保护的技术使用者:吉林农业大学
技术研发日:20230417
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!