一种无人水上航行器侧向阻拦装置的制作方法
本技术属于无人海洋装备领域,尤其涉及一种无人水上航行器侧向阻拦装置。
背景技术:
1、海洋无人航行器(unmanned underwater vehicle,uuv)是指一种不需要人员操控的自主水下航行器,它可以在海洋深处执行各种任务,如海洋勘测、水下探测、搜索救援、水下作业等。海洋无人航行器通常由船体、动力系统、传感器、通信系统和控制系统等组成,可以通过预先设定的任务计划进行自主控制,也可以通过遥控方式进行控制。海洋无人航行器的应用领域非常广泛,已经成为海洋探测和开发的重要工具之一。
2、海洋无人航行器在完成作业任务,需要回到母船时,需要对无人航行器就行捕捉回收,现有的回收作业多采用回收艇以大艇收小艇的方式,再驾驶大艇回到母船,或通过吊机将大艇收回母船,这样的方式相对繁琐,且无人航行器速度较高的话,捕捉过程易损坏无人航行器。
3、采用过渡浮船坞提前捕捉的,面对长宽规格,吃水深度不同且速度较快的无人航行器无法做到较好的适配,捕捉能力较弱。
4、现有的捕捉回收方法都需要一种能够让无人航行器逐渐减速的装置,以避免无人航行器的损坏,且能适应不同规格的无人航行器。
技术实现思路
1、本实用新型目的在于提供一种无人水上航行器侧向阻拦装置,以解决无人航行器在捕捉回收过程中进行约束,调整前进方向,降低行进速度的技术问题。
2、为实现上述目的,本实用新型的一种无人水上航行器侧向阻拦装置的具体技术方案如下:
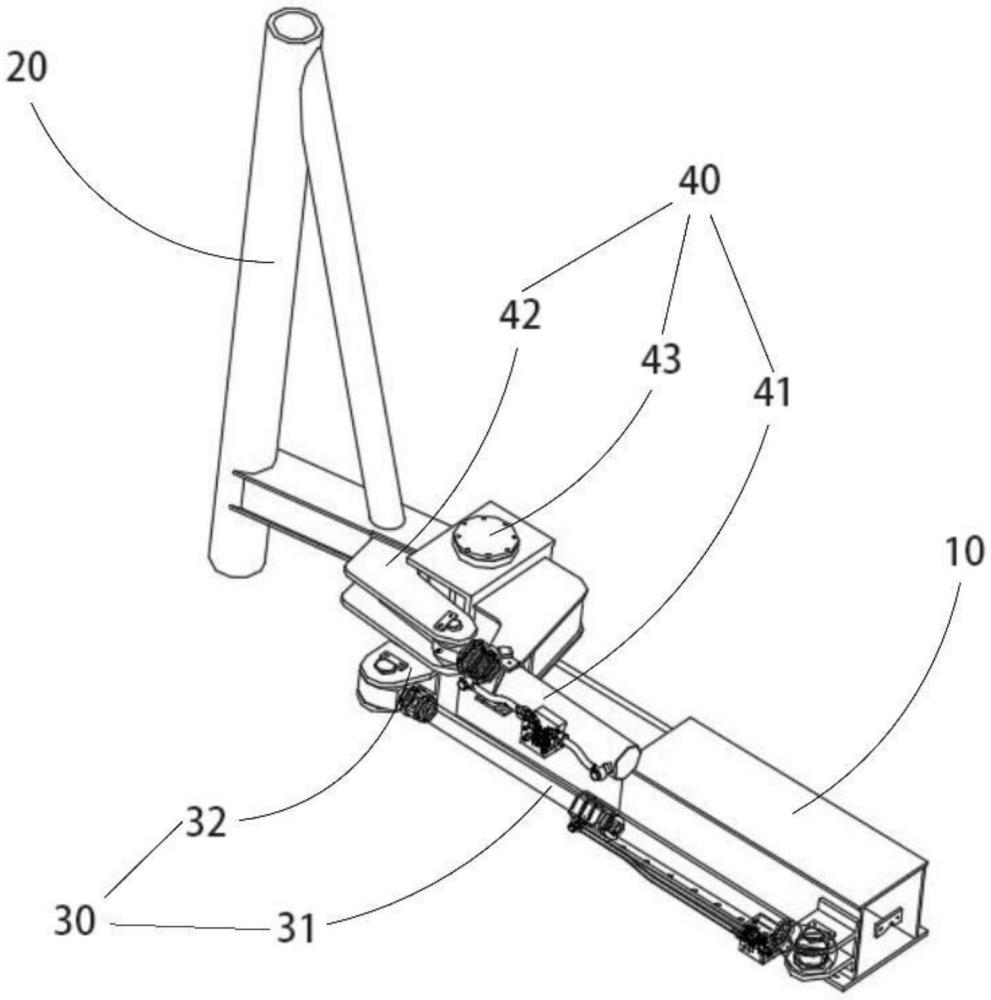
3、一种无人水上航行器侧向阻拦装置,包括阻拦臂支架,与所述阻拦臂支架连接的阻拦臂,以及设置在所述阻拦臂支架上与所述阻拦臂连接的伸缩结构和旋转结构;所述伸缩结构和旋转结构控制所述阻拦臂伸缩和旋转。
4、为了实现阻拦臂朝向待回收无人水上航行器的伸出和缩回,所述伸缩结构包括设置在所述阻拦臂支架上的伸缩油缸,与所述伸缩油缸的伸缩端连接的伸缩连接块;所述阻拦臂与所述伸缩连接块连接,所述阻拦臂在所述伸缩油缸的驱动下伸缩。
5、为了实现阻拦臂朝向待回收无人水上航行器的旋转,所述旋转结构包括设置在所述阻拦臂支架上的旋转油缸,与所述旋转油缸的伸缩端连接的旋转连接块,以及设置在所述伸缩连接块上的旋转轴;所述阻拦臂与所述旋转连接块连接且与所述旋转轴可旋转连接,所述阻拦臂在所述旋转油缸的驱动下旋转。
6、为了实现伸缩臂回收时,伸缩连接块进入阻拦臂支架内,所述阻拦臂支架为中空结构,所述伸缩连接块与所述阻拦臂支架通过导轨结构连接,所述导轨结构设置在所述阻拦臂支架内,所述伸缩油缸收缩时,所述伸缩连接块缩入所述阻拦臂支架内。
7、为了实现驱动和控制阻拦臂的伸缩和旋转,阻拦装置还包括控制结构。
8、为了适应无人水上航行器不同截面的约束需求,以及控制阻拦动作的幅度,所诉旋转轴上设置有角度编码器,所述伸缩油缸上设置有位移传感器,所述控制结构根据所述角度编码器和所述位移传感器的反馈信号,控制所述阻拦臂的伸缩程度和旋转角度。
9、为了防止无人水上航行器侧壁因过大压力而损坏,所述旋转油缸上设置有压力传感器,所述控制结构根据所述压力传感器的反馈信号,控制所述阻拦臂的伸缩程度和旋转角度。
10、为了避免与无人航行器接触时损坏无人水上航行器,所述阻拦臂材质为柔性材料。
11、有益效果:
12、阻拦臂向航行中的无人水上航行器伸出,从侧面接触无人水上航行器,对航行器进行减速,可以通过多个成对设置的阻拦装置,同时对航行器的两侧进行约束,在限制前进方向的同时降低行进速度,通过阻拦臂的伸缩和旋转实现对无人水上航行器的运动轨迹的调整,使无人航行朝着预定的目的地减速行驶,直到停止在目的地,实现捕捉回收。
13、本实用新型的阻拦装置,适用范围较广,可以多个成对使用形成阻拦通道,通过调整多个阻拦装置的位置和间距可以适用更多规格的航行器的捕捉回收,也可以单个使用用于减速无人水上航行器或调整无人水上航行器的前进方向,
技术特征:
1.一种无人水上航行器侧向阻拦装置,其特征在于,包括阻拦臂支架,与所述阻拦臂支架连接的阻拦臂,以及设置在所述阻拦臂支架上与所述阻拦臂连接的伸缩结构和旋转结构;所述伸缩结构和旋转结构控制所述阻拦臂伸缩和旋转。
2.根据权利要求1所述的无人水上航行器侧向阻拦装置,其特征在于,所述伸缩结构包括设置在所述阻拦臂支架上的伸缩油缸,与所述伸缩油缸的伸缩端连接的伸缩连接块;所述阻拦臂与所述伸缩连接块连接,所述阻拦臂在所述伸缩油缸的驱动下伸缩。
3.根据权利要求2所述的无人水上航行器侧向阻拦装置,其特征在于,所述旋转结构包括设置在所述阻拦臂支架上的旋转油缸,与所述旋转油缸的伸缩端连接的旋转连接块,以及设置在所述伸缩连接块上的旋转轴;所述阻拦臂与所述旋转连接块连接且与所述旋转轴可旋转连接,所述阻拦臂在所述旋转油缸的驱动下旋转。
4.根据权利要求2或3所述的无人水上航行器侧向阻拦装置,其特征在于,所述阻拦臂支架为中空结构,所述伸缩连接块与所述阻拦臂支架通过导轨结构连接,所述导轨结构设置在所述阻拦臂支架内,所述伸缩油缸收缩时,所述伸缩连接块缩入所述阻拦臂支架内。
5.根据权利要求3所述的无人水上航行器侧向阻拦装置,其特征在于,还包括控制结构,控制结构能驱动和控制所述阻拦臂的伸缩和旋转。
6.根据权利要求5所述的无人水上航行器侧向阻拦装置,其特征在于,所诉旋转轴上设置有角度编码器,所述伸缩油缸上设置有位移传感器,所述控制结构根据所述角度编码器和所述位移传感器的反馈信号,控制所述阻拦臂的伸缩程度和旋转角度。
7.根据权利要求5或6所述的无人水上航行器侧向阻拦装置,其特征在于,所述旋转油缸上设置有压力传感器,所述控制结构根据所述压力传感器的反馈信号,控制所述阻拦臂的伸缩程度和旋转角度。
8.根据权利要求1所述的无人水上航行器侧向阻拦装置,其特征在于,所述阻拦臂材质为柔性材料。
技术总结
一种无人水上航行器侧向阻拦装置,包括阻拦臂支架,与所述阻拦臂支架连接的阻拦臂,以及设置在所述阻拦臂支架上与所述阻拦臂连接的伸缩结构和旋转结构;所述伸缩结构和旋转结构控制所述阻拦臂伸缩和旋转。本技术通过阻拦臂的伸缩和旋转对无人水上航行器进行侧向约束,调整无人水上航行器的前进方向并降低前进速度。
技术研发人员:眭奕奕,赵明清,印俊,高立全
受保护的技术使用者:中船绿洲镇江船舶辅机有限公司
技术研发日:20230609
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!