一种导管架和多桩结构钢管检测用水下机器人及使用方法与流程
本发明涉及水下机器人,具体为一种导管架和多桩结构钢管检测用水下机器人及使用方法。
背景技术:
1、导管架和多桩结构是海上风电场水下结构的重要形式,主要由钢管通过焊接构成,由于钢管由于长期在海洋复杂环境下工作,易受渔业、风电场日常运维作业活动、地质灾害等各种复杂因素影响,出现腐蚀、损伤等情况,一旦发生缺陷,对生产造成极大的威胁,具有极大的安全风险。
2、授权公告号为cn111038669b的中国发明专利公开了一种海底管道检测型水下机器人,用于对水下管道进行精确检测,水下机器人(rov)包括rov本体、固定管道夹具装置以及链条式管道可横向检测装置,rov本体作为载体为夹具装置和检测装置提供动力,夹具装置通过直线导轨滑块机构转化左支架与右支架的转动,从而带动支架上卡爪的转动,最终使该夹具装置转化为对管道的夹紧力,防止rov本体的晃动和摆动,保证夹具工作的可靠性。也保证链条式管道可横向检测装置提供稳定的检测环境。检测装置中柔性机械手搭载检测设备对管道进行检测,在沿着管道轴向检测的基础上可以进行横向旋转式检测。同时,本种水下机器人采用柔性机械手结构可以自动贴附管道壁,适用于大多数直径的管道。但是,上述技术方案中存在以下缺陷:
3、上述海底管道检测型水下机器人通过左右卡爪夹紧管道的外周面,再通过机器人的推进器带动机器人沿着管道移动,但是由于海底管道外周面并不光滑,卡爪夹紧在管道外周面上不能顺畅的移动,使机器人移动不顺畅,也不方便检测。
技术实现思路
1、为解决现有技术中存在的技术问题,本发明的目的在于提供一种导管架和多桩结构钢管检测用水下机器人及使用方法。
2、为实现上述目的,达到上述技术效果,本发明的技术方案为:
3、一种导管架和多桩结构钢管检测用水下机器人,包括机器人本体、检测装置和安装部,所述机器人本体上设置检测装置和安装部,所述安装部设有若干个,安装部之间的距离可调,所述安装部上设置有用于夹紧钢管的夹持组件,通过控制安装部带动夹持组件相互靠近或远离,实现机器人本体沿钢管的中轴线方向移动或者沿钢管的轴线旋转,改变检测装置的检测位置。
4、进一步的,所述机器人本体上设有机架,所述机架上转动设置有多个推进机构,多个推进机构在机架上均匀分布,所述检测装置连接机架,所述安装部滑动连接机架,所述机架上设有用于调节安装部之间距离的调节机构。
5、进一步的,所述安装部设有两个,两个安装部均滑动连接机架,两个安装部在机架上对称分布,所述机架上设有用于调节两个安装部之间距离的调节机构,两个安装部上均设置有用于夹紧钢管的夹持组件,两个夹持组件对称分布并用于夹紧钢管的外周面,通过调节机构控制两个安装部带动夹持组件相互靠近或远离,实现机器人本体沿钢管的中轴线方向移动或者沿钢管的轴线旋转。
6、进一步的,所述所述调节机构包括驱动组件、滑杆和双螺纹杆,所述滑杆连接机架,所述双螺纹杆转动连接机架,所述双螺纹杆与滑杆并排分布,所述机架上设有驱动组件,所述驱动组件传动连接双螺纹杆,所述驱动组件的外侧套设有安装壳,所述安装壳连接机架,所述安装部的上端设有安装块,所述安装块滑动连接滑杆,两个安装部上的安装块均与双螺纹杆传动连接。
7、进一步的,所述安装块上设有螺母,所述螺母与双螺纹杆螺纹配合连接。
8、进一步的,所述夹持组件包括导杆、夹板和弹簧a,所述导杆设有多个,多个导杆均连接夹板并在夹板上均匀分布,多个导杆均滑动连接安装部,所述导杆远离夹板的一端设有端头,所述夹板上设有滚轮组件a和滚轮组件b,所述弹簧a设有多个,多个弹簧a分别套设在多个导杆的外侧,所述弹簧a两端连接安装部和端头,所述弹簧a处于拉伸状态。
9、进一步的,所述滚轮组件a包括多个滚轮a,所述夹板上设有两个安装槽a,两个安装槽a在夹板上对称分布,多个滚轮a均转动连接两个安装槽a,所述滚轮a的轴线方向与钢管的轴线方向垂直设置;所述夹板上滑动设置滚轮组件b,所述安装部靠近夹板的一端设有凸块,所述凸块与滚轮组件b配合连接。
10、进一步的,所述滚轮组件b包括滚轮b、安装架和弹簧b,所述滚轮b设有两个,两个滚轮b均转动连接安装架,所述滚轮b的轴线方向与钢管的轴线方向平行设置,所述夹板上设有安装槽b,所述安装架滑动连接安装槽b,所述安装部上的凸块与安装架配合连接,所述安装槽b内周面设有多个滑槽,所述安装架外周面设有多个滑块,所述滑块分别与多个滑槽滑动配合连接,所述弹簧b设有多个,所述弹簧b与滑块一一对应,所述弹簧b两端分别连接滑槽和滑块远离安装部的一端,所述弹簧b处于压缩状态。
11、进一步的,所述夹板的投影形状为v形,v形夹板之间的夹角为钝角。
12、本发明还公开了一种导管架和多桩结构钢管检测用水下机器人的使用方法,包括以下步骤:
13、s1、首先将机器人本体放置在水中,操作者控制机器人本体逐渐移动至需要检测的钢管上方;
14、s2、通过控制器控制调节机构启动,带动两个安装部相互远离,进而带动夹持组件相互远离;
15、s3、通过控制器控制多个推进机构将机器人本体下降,使两个夹持组件位于钢管的两端;
16、s4、通过控制器控制调节机构启动,带动两个安装部相互靠近,进而带动两个夹持组件夹紧在钢管的外周面;
17、s5、使夹持组件中的滚轮组件a与钢管外周面配合连接,通过控制器控制推进机构启动,带动机器人本体沿着钢管的中轴线方向移动,通过机器人本体上的检测装置对钢管进行检测;
18、s6、当需要调节检测的位置时,通过控制器控制调节机构启动,带动安装部之间的距离继续靠近;
19、s7、使夹持组件上的滚轮组件b与钢管的外周面配合连接,通过控制器控制推进机构旋转,使推进机构的推进方向为机器人本体的侧边;
20、s8、机器人本体围着钢管的轴线旋转,即可改变检测装置的检测位置,使钢管检测更加全面和方便。
21、与现有技术相比,本发明的上述技术方案具有如下有益的技术效果:
22、1)本发明公开了一种导管架和多桩结构钢管检测用水下机器人及使用方法,通过调节机构可调节两个安装部之间的距离,进一步使夹持组件适应不同管径的钢管;
23、2)本发明公开了一种导管架和多桩结构钢管检测用水下机器人及使用方法,夹持组件中的弹簧a在移动时可起到移动的缓冲作用,当钢管外周面不平整时,夹持组件也可继续移动,不会被阻挡;
24、3)本发明公开了一种导管架和多桩结构钢管检测用水下机器人及使用方法,夹持组件和机器人本体的推进机构配合,通过调节机构可控制两个安装部带动夹持组件相互靠近或远离,实现机器人本体沿钢管的中轴线方向移动或者沿钢管的轴线旋转,改变检测装置的检测位置,不需要额外机构,检测更全面,使用更方便,机器人本体移动灵活性高。
技术特征:
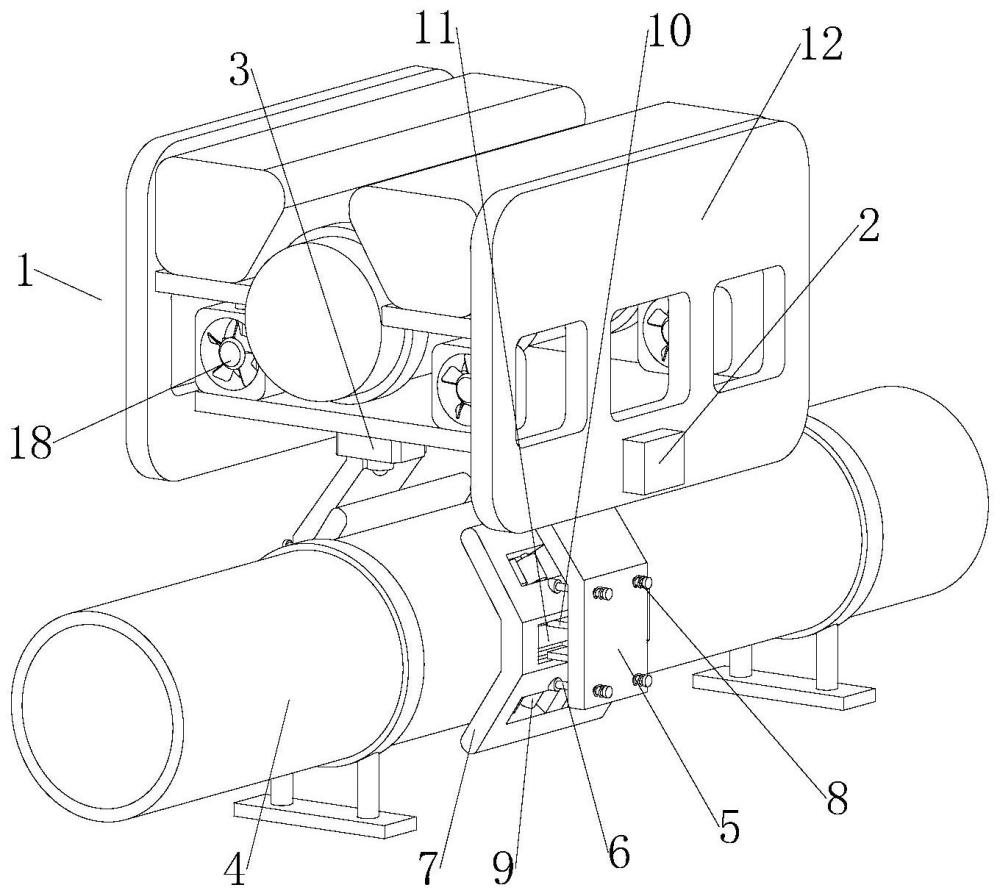
1.一种导管架和多桩结构钢管检测用水下机器人,其特征在于,包括机器人本体(1)、检测装置(3)和安装部(5),所述机器人本体(1)上设置检测装置(3)和安装部(5),所述安装部(5)设有若干个,安装部(5)之间的距离可调,所述安装部(5)上设置有用于夹紧钢管(4)的夹持组件,通过控制安装部(5)带动夹持组件相互靠近或远离,实现机器人本体(1)沿钢管(4)的中轴线方向移动或者沿钢管(4)的轴线旋转,改变检测装置(3)的检测位置。
2.根据权利要求1所述的一种导管架和多桩结构钢管检测用水下机器人,其特征在于,所述机器人本体(1)上设有机架(12),所述机架(12)上转动设置有多个推进机构(18),多个推进机构(18)在机架(12)上均匀分布,所述检测装置(3)连接机架(12),所述安装部(5)滑动连接机架(12),所述机架(12)上设有用于调节安装部(5)之间距离的调节机构。
3.根据权利要求1或2所述的一种导管架和多桩结构钢管检测用水下机器人,其特征在于,所述安装部(5)设有两个,两个安装部(5)均滑动连接机架(12),两个安装部(5)在机架(12)上对称分布,所述机架(12)上设有用于调节两个安装部(5)之间距离的调节机构,两个安装部(5)上均设置有用于夹紧钢管(4)的夹持组件,两个夹持组件对称分布并用于夹紧钢管(4)的外周面,通过调节机构控制两个安装部(5)带动夹持组件相互靠近或远离,实现机器人本体(1)沿钢管(4)的中轴线方向移动或者沿钢管(4)的轴线旋转。
4.根据权利要求3所述的一种导管架和多桩结构钢管检测用水下机器人,其特征在于,所述所述调节机构包括驱动组件(13)、滑杆(15)和双螺纹杆(16),所述滑杆(15)连接机架(12),所述双螺纹杆(16)转动连接机架(12),所述双螺纹杆(16)与滑杆(15)并排分布,所述机架(12)上设有驱动组件(13),所述驱动组件(13)传动连接双螺纹杆(16),所述驱动组件(13)的外侧套设有安装壳(2),所述安装壳(2)连接机架(12),所述安装部(5)的上端设有安装块(17),所述安装块(17)滑动连接滑杆(15),两个安装部(5)上的安装块(17)均与双螺纹杆(16)传动连接。
5.根据权利要求4所述的一种导管架和多桩结构钢管检测用水下机器人,其特征在于,所述安装块(17)上设有螺母,所述螺母与双螺纹杆(16)螺纹配合连接。
6.根据权利要求3所述的一种导管架和多桩结构钢管检测用水下机器人,其特征在于,所述夹持组件包括导杆(6)、夹板(7)和弹簧a(8),所述导杆(6)设有多个,多个导杆(6)均连接夹板(7)并在夹板(7)上均匀分布,多个导杆(6)均滑动连接安装部(5),所述导杆(6)远离夹板(7)的一端设有端头,所述夹板(7)上设有滚轮组件a和滚轮组件b,所述弹簧a(8)设有多个,多个弹簧a(8)分别套设在多个导杆(6)的外侧,所述弹簧a(8)两端连接安装部(5)和端头,所述弹簧a(8)处于拉伸状态。
7.根据权利要求6所述的一种导管架和多桩结构钢管检测用水下机器人,其特征在于,所述滚轮组件a包括多个滚轮a(9),所述夹板(7)上设有两个安装槽a,两个安装槽a在夹板(7)上对称分布,多个滚轮a(9)均转动连接两个安装槽a,所述滚轮a(9)的轴线方向与钢管(4)的轴线方向垂直设置;所述夹板(7)上滑动设置滚轮组件b,所述安装部(5)靠近夹板(7)的一端设有凸块(10),所述凸块(10)与滚轮组件b配合连接。
8.根据权利要求6所述的一种导管架和多桩结构钢管检测用水下机器人,其特征在于,所述滚轮组件b包括滚轮b(11)、安装架(14)和弹簧b(20),所述滚轮b(11)设有两个,两个滚轮b(11)均转动连接安装架(14),所述滚轮b(11)的轴线方向与钢管(4)的轴线方向平行设置,所述夹板(7)上设有安装槽b,所述安装架(14)滑动连接安装槽b,所述安装部(5)上的凸块(10)与安装架(14)配合连接,所述安装槽b内周面设有多个滑槽,所述安装架(14)外周面设有多个滑块(19),所述滑块(19)分别与多个滑槽滑动配合连接,所述弹簧b(20)设有多个,所述弹簧b(20)与滑块(19)一一对应,所述弹簧b(20)两端分别连接滑槽和滑块(19)远离安装部(5)的一端,所述弹簧b(20)处于压缩状态。
9.根据权利要求6所述的一种导管架和多桩结构钢管检测用水下机器人,其特征在于,所述夹板(7)的投影形状为v形,v形夹板(7)之间的夹角为钝角。
10.根据权利要求1-9任一所述的一种导管架和多桩结构钢管检测用水下机器人的使用方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种导管架和多桩结构钢管检测用水下机器人及使用方法,该水下机器人包括机器人本体、检测装置和安装部,机器人本体上设检测装置和安装部,安装部设有若干个,安装部之间的距离可调,安装部上设用于夹紧钢管的夹持组件,检测装置的检测位置可调。本发明通过调节机构控制两个安装部带动夹持组件相互靠近或远离,可使夹持组件适应不同管径的钢管,可实现机器人本体沿钢管的中轴线方向移动或者沿钢管的轴线旋转,改变检测装置的检测位置,检测更全面,使用更方便,不需要额外机构,夹持组件中的弹簧a在移动时可起到缓冲作用,当钢管外周面不平整时,夹持组件也可继续移动,不会被阻挡,机器人本体移动灵活性高。
技术研发人员:姚中原,童博,赵勇,赵剑剑,曹治,白亮,蒋贲,王新,孙捷,胡皓,许杰,孙铭,王方锐,周恒乐
受保护的技术使用者:盛东如东海上风力发电有限责任公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!