一种水下作业系统及方法与流程
本发明涉及水下作业,特别涉及一种水下作业系统及方法。
背景技术:
1、海洋蕴藏着巨大的资源,如天然气、矿物等,为了获取海洋资源,则必须进行水下作业。虽然,随着水下作业技术的积累以及其关键装备的迭代提升,水下作业效率及安全性有了显著提升,但是,受到风、浪、流水文环境及海洋气候等复杂因素影响,由此带来的高昂商业开发成本与安全风险一直是行业亟待解决的问题。
2、目前,水下作业大都采用单机工作模式,不仅水下作业效率被限制,还使得水下作业成本较高。此外,现有的水下作业装置与水面支持船舶的脱离与连接十分不便,且要求水面支持船舶的甲板的面积较大以便于水下作业装置的安装。
技术实现思路
1、本发明的目的在于提供一种水下作业系统及方法,以至少解决如何提高水下作业系统的安装效率的问题。
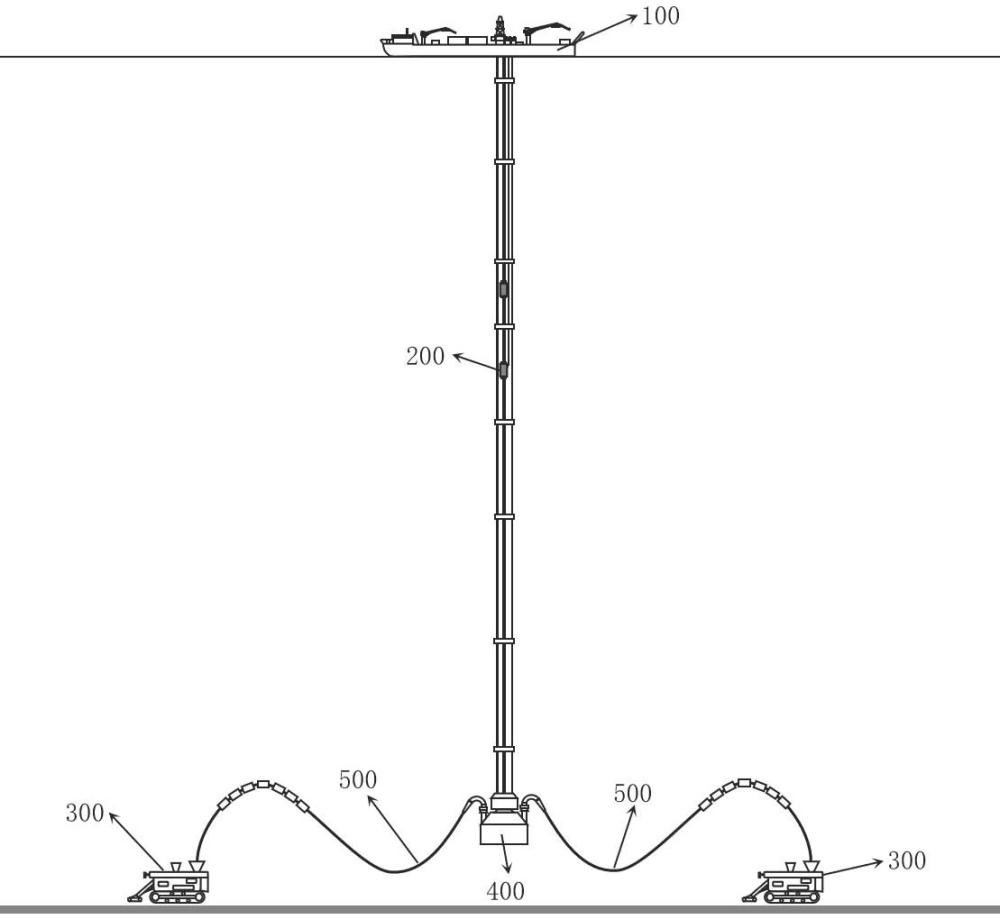
2、为解决上述技术问题,本发明提供一种水下作业系统,包括水面支持船、立管提升装置和水下作业装置;所述立管提升装置的一端设置于所述水面支持船,另一端可拆卸地设置有多功能立管基础模块,所述水下作业装置通过柔性跨接管束与所述多功能立管基础模块可拆卸的连接。
3、可选的,在所述的水下作业系统中,所述立管提升装置包括物料传输立管、尾水排放立管、提升动力脐带缆束、水下作业脐带缆、提升装备和卡箍;所述物料传输立管、所述尾水排放立管和所述水下作业脐带缆的两端分别与所述水面支持船和所述多功能立管基础模块相连;所述提升装备安装于所述物料传输立管,用于对所述物料传输立管内的物料提供传输动力;所述提升动力脐带缆束用于为所述提升装备提供能源及通信;所述尾水排放立管、所述提升动力脐带缆束和所述水下作业脐带缆通过所述卡箍与所述物料传输立管相固定。
4、可选的,在所述的水下作业系统中,所述多功能立管基础模块包括基础本体、液压抱紧机构和水下对接头;所述物料传输立管的一端通过所述液压抱紧机构与所述水下对接头相固定,以与所述基础本体相连通。
5、可选的,在所述的水下作业系统中,所述多功能立管基础模块还包括水下连接器;所述柔性跨接管束的一端与所述水下连接器可拆卸连接。
6、可选的,在所述的水下作业系统中,所述柔性跨接管束的部分外部布置有浮体,所述浮体用于对所述柔性跨接管束提供浮力以改变所述柔性跨接管束的受力状态。
7、为解决上述技术问题,本发明提供一种水下作业方法,用于构建如上任一项所述的水下作业系统,所述水下作业方法包括:
8、水面支持船行驶至作业位置,并将多功能立管基础模块布放至水底第一目标位置;
9、水面支持船将水下作业装置布放至水底第二目标位置;
10、水面支持船将柔性跨接管束吊放至水中预设位置;
11、水面支持船布放水下作业机器人,并通过水下作业机器人将柔性跨接管束的两端分别与多功能立管基础模块和水下作业装置固定连接;
12、水面支持船将立管提升装置布放至水中,并通过水下作业机器人将立管提升装置的末端与多功能立管基础模块固定连接;
13、通过立管提升装置将多功能立管基础模块提升至预设高度。
14、可选的,在所述的水下作业方法中,所述通过水下作业机器人将立管提升装置的末端与多功能立管基础模块固定连接的方法包括:
15、水下作业机器人将立管提升装置的末端与多功能立管基础模块的水下对接头对齐;
16、利用多功能立管基础模块的液压抱紧机构使立管提升装置的末端与水下对接头锁紧固定。
17、可选的,在所述的水下作业方法中,所述水下作业方法还包括:通过立管提升装置将多功能立管基础模块下放至水底;
18、控制液压抱紧机构松开,以使立管提升装置的末端与水下对接头分离。
19、可选的,在所述的水下作业方法中,所述水下作业方法还包括:
20、水面支持船将临时接插拔模块吊放至水中,并布放水下作业机器人;
21、利用水下作业机器人将柔性跨接管束与水下作业装置相连的一端从水下作业装置上取下并插入临时接插拔模块;
22、水面支持船下放吊放缆;
23、利用水下作业机器人将水下作业装置固定于吊放缆;
24、水面支持船回收吊放缆,以回收水下作业装置。
25、可选的,在所述的水下作业方法中,所述水下作业方法还包括:
26、水面支持船将水下作业装置布放至水底第二目标位置;
27、利用水下作业机器人将柔性跨接管束与临时接插拔模块相连的一端从临时接插拔模块上取下并插入水下作业装置;
28、水面支持船回收临时接插拔模块。
29、本发明提供的水下作业系统及方法,包括水面支持船、立管提升装置和水下作业装置;所述立管提升装置的一端设置于所述水面支持船,另一端可拆卸地设置有多功能立管基础模块,所述水下作业装置通过柔性跨接管束与所述多功能立管基础模块可拆卸的连接。通过将立管提升装置、多功能立管基础模块和水下作业装置可拆卸连接设计,使得水下作业系统能够在水下便捷地进行安装和拆卸,从而无需在水面支持船的甲板上进行安装拆卸,不仅省去了甲板面积,还提高了安装拆卸的灵活性,从而有效提高了水下作业系统的安装效率,解决了如何提高水下作业系统的安装效率的问题。
技术特征:
1.一种水下作业系统,其特征在于,包括水面支持船、立管提升装置和水下作业装置;所述立管提升装置的一端设置于所述水面支持船,另一端可拆卸地设置有多功能立管基础模块,所述水下作业装置通过柔性跨接管束与所述多功能立管基础模块可拆卸的连接;所述立管提升装置包括物料传输立管、尾水排放立管、提升动力脐带缆束、水下作业脐带缆、提升装备和卡箍;所述物料传输立管、所述尾水排放立管和所述水下作业脐带缆的两端分别与所述水面支持船和所述多功能立管基础模块相连;所述提升装备安装于所述物料传输立管,用于对所述物料传输立管内的物料提供传输动力;所述提升动力脐带缆束用于为所述提升装备提供能源及通信;所述尾水排放立管、所述提升动力脐带缆束和所述水下作业脐带缆通过所述卡箍与所述物料传输立管相固定。
2.根据权利要求1所述的水下作业系统,其特征在于,所述多功能立管基础模块包括基础本体、液压抱紧机构和水下对接头;所述物料传输立管的一端通过所述液压抱紧机构与所述水下对接头相固定,以与所述基础本体相连通。
3.根据权利要求1所述的水下作业系统,其特征在于,所述多功能立管基础模块还包括水下连接器;所述柔性跨接管束的一端与所述水下连接器可拆卸连接。
4.根据权利要求1所述的水下作业系统,其特征在于,所述柔性跨接管束的部分外部布置有浮体,所述浮体用于对所述柔性跨接管束提供浮力以改变所述柔性跨接管束的受力状态。
5.一种水下作业方法,用于构建如权利要求1~4任一项所述的水下作业系统,其特征在于,所述水下作业方法包括:
6.根据权利要求5所述的水下作业方法,其特征在于,所述通过水下作业机器人将立管提升装置的末端与多功能立管基础模块固定连接的方法包括:
7.根据权利要求6所述的水下作业方法,其特征在于,所述水下作业方法还包括:
8.根据权利要求5所述的水下作业方法,其特征在于,所述水下作业方法还包括:
9.根据权利要求8所述的水下作业方法,其特征在于,所述水下作业方法还包括:
技术总结
本发明提供一种水下作业系统及方法,包括水面支持船、立管提升装置和水下作业装置;所述立管提升装置的一端设置于所述水面支持船,另一端可拆卸地设置有多功能立管基础模块,所述水下作业装置通过柔性跨接管束与所述多功能立管基础模块可拆卸的连接。通过将立管提升装置、多功能立管基础模块和水下作业装置可拆卸连接设计,使得水下作业系统能够在水下便捷地进行安装和拆卸,从而无需在水面支持船的甲板上进行安装拆卸,不仅省去了甲板面积,还提高了安装拆卸的灵活性,从而有效提高了水下作业系统的安装效率,解决了如何提高水下作业系统的安装效率的问题。
技术研发人员:刘建成,张修占,李磊,黄朝俊,戚宝运,陈峰落,袁振钦
受保护的技术使用者:招商局深海装备研究院(三亚)有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!