一种软体水下机器人的辅助浮潜机构
本申请属于软体机器人浮潜机构设计领域,特别涉及一种软体水下机器人的辅助浮潜机构。
背景技术:
1、近年来,随着海洋利益的不断突显及海洋探索的不断深入,对于水下机器人的技术也有了更高的新要求,需要其有更高的耐压性能。人们从而将目光投入到软体水下机器人的领域,然而软体水下机器人的运动关节多为一个自由度关节,难以实现机器人在运动过程中的上浮下潜运动。所以对于软体机器人的浮潜机构的设计是很有必要的。
2、现有的申请号为202310380817.5的一种仿生鱼鳔浮潜的刚柔耦合仿生机器鱼中提到了一种仿生鱼鳔的浮潜机构,采用气泵,气缸,推杆及推板,电磁阀和储气室构成的一个可变体积的装置,通过增大和减小气缸的体积,从而实现机器鱼的上浮下潜运动,然而电磁阀和气泵等的重量太大,对能量损耗过大,且会影响机器鱼在水中的游动速度。
3、现有的申请号为202222653683.3的一种机器鱼的电子鱼鳔装置中提及的仿生机器鱼采用由齿轮组、蜗轮蜗杆、电机、传动轴及刚性板等组成的体积可变的气密空腔作为仿鱼鳔浮潜机构,相比于重心调节机构,其减少了机器鱼整体重量,但由于采用较多的刚性机械机构使其柔性不足。
4、现有的申请号为202210312242.9的一种水下机器人专用的浮潜机构的设计,该结构主要组成包括基体,两个集水槽a,b,涡轮,通过控制涡轮不同方向的转动,和控制a,b及水槽中的储水量实现上浮下潜运动,该发明提高了机器人上浮下潜的效率。但是该装置使用涡轮在水中会产生很大波动,从而对海洋环境产生较大影响。
5、综上所述,现有的技术存在:体积大,重量大,能耗大,刚性结构太多不利于软体集成,对海洋环境的影响较大等问题。
技术实现思路
1、本申请的目的是提供了一种软体水下机器人的辅助浮潜机构,以解决现有技术中难以对软体水下机器人进行辅助浮潜机构设计的问题。
2、本申请的技术方案是:一种软体水下机器人的辅助浮潜机构,包括基体、柔性内水室、柔性外水室和水泵,所述基体与柔性外水室配合组成机器人的头部,所述基体内设置三个腔室,分别为运动控制腔、动力腔和浮潜腔;所述运动控制腔与机器人的身体部位相接,所述运动控制设备设于运动控制腔内,所述浮潜腔设于基体的顶部,所述动力腔设于运动控制腔与浮潜腔之间;
3、所述柔性内水室和柔性外水室均为密封结构,所述柔性内水室设于浮潜腔内,所述柔性外水室设于基体外侧,所述水泵设于动力室内并且水泵与柔性内水室和柔性外水室相连,所述柔性内水室和柔性外水室中至少一个腔室内填充有水,所述水泵能够将柔性内水室内的水抽入至柔性外水室内,辅助机器人上浮;或者将柔性外水室内的水抽入至柔性内水室内,辅助机器人下潜。
4、优选地,所述柔性外水室为半椭球形腔室,所述柔性外水室位于基体的侧方。
5、优选地,所述柔性外水室、柔性内水室和水泵均有两组并沿着基体的中部对称设置;所述柔性外水室的一端设于运动控制腔与机器人身体的交界处、另一端设于动力腔与浮潜腔的外部交界处
6、优选地,所述柔性外水室和柔性内水室采用硅橡胶材料制作,所述基体采用刚体材料制作。
7、优选地,所述柔性内水室一端设于浮潜腔的内侧顶部、另一端设于浮潜腔与动力腔的内部交界处,所述浮潜腔横截面的外表面为外凸的圆弧形。
8、本申请的软体水下机器人的辅助浮潜机构,通过只抽取密闭水室的水来实现上浮下潜,和外界环境没有交互,故对海洋环境的几乎没有影响;通过水泵即可实现上浮下潜,能耗要求较小且系统封闭不与外界环境发生交互作用,不会对外部水环境进行干扰;可根据被集成的软体水下机器人的要求进行体积和结构的设计,易于水下软体机器人的集成。
技术特征:
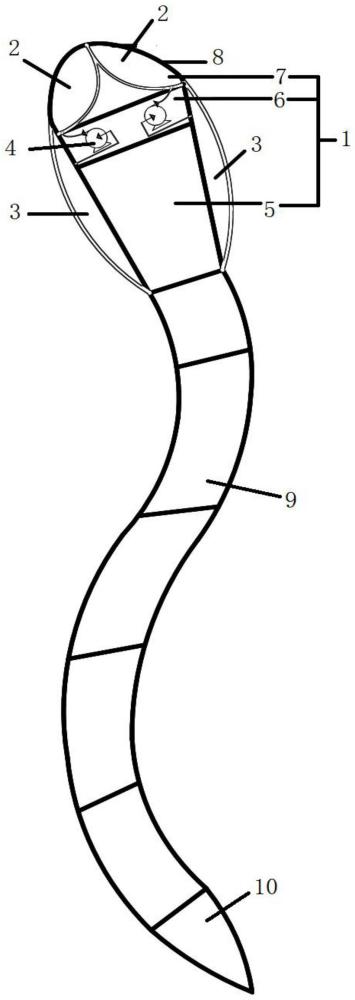
1.一种软体水下机器人的辅助浮潜机构,其特征在于:包括基体(1)、柔性内水室(2)、柔性外水室(3)和水泵(4),所述基体(1)与柔性外水室(3)配合组成机器人的头部(8),所述基体(1)内设置三个腔室,分别为运动控制腔(5)、动力腔(6)和浮潜腔(7);所述运动控制腔(5)与机器人的身体(9)部位相接,所述环境检测设备设于运动控制腔(5)内,所述浮潜腔(7)设于基体(1)的顶部,所述动力腔(6)设于运动控制腔(5)与浮潜腔(7)之间;
2.如权利要求1所述的软体水下机器人的辅助浮潜机构,其特征在于:所述柔性外水室(3)为半椭球形腔室,所述柔性外水室(3)位于基体(1)的侧方。
3.如权利要求1所述的软体水下机器人的辅助浮潜机构,其特征在于:所述柔性外水室(3)、柔性内水室(2)和水泵(4)均有两组并沿着基体(1)的中部对称设置;所述柔性外水室(3)的一端设于运动控制腔(5)与机器人身体(9)的交界处、另一端设于动力腔(6)与浮潜腔(7)的外部交界处。
4.如权利要求1所述的软体水下机器人的辅助浮潜机构,其特征在于:所述柔性外水室(3)和柔性内水室(2)采用硅橡胶材料制作,所述基体(1)采用刚体材料制作。
5.如权利要求1所述的软体水下机器人的辅助浮潜机构,其特征在于:所述柔性内水室(2)一端设于浮潜腔(7)的内侧顶部、另一端设于浮潜腔(7)与动力腔(6)的内部交界处,所述浮潜腔(7)横截面的外表面为外凸的圆弧形。
技术总结
本申请属于软体机器人浮潜机构设计领域,为一种软体水下机器人的辅助浮潜机构,包括基体、柔性水室和水泵,基体与机器人的运动控制设备配合组成机器人的头部,基体内设置三个腔室,分别为运动控制腔、动力腔和浮潜腔;运动控制腔与机器人的身体部位相接;柔性水室包括柔性内水室和柔性外水室,水泵设于动力室内并且水泵与柔性内水室和柔性外水室相连,柔性内水室和柔性外水室中至少一个腔室内填充有水。通过只抽取密闭水室的水来实现上浮下潜,和外界环境没有交互,故对海洋环境的几乎没有影响;通过水泵即可实现上浮下潜,能耗要求较小且系统封闭不与外界环境发生交互作用,不会对外部水环境进行干扰。
技术研发人员:史航,孟亚莉,崔文龙,王姝婷
受保护的技术使用者:上海大学
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!