用于减少阻力的折叠的同心安装的螺旋桨叶片的制作方法
[0001]
本公开总体上涉及螺旋桨叶片安装件,具体地但非排他地涉及用于无人飞行器的螺旋桨叶片安装件。
背景技术:
[0002]
无人运载工具,其也可以被称为自主运载工具(vehicle),是能够在没有实际存在的人类操作员的情况下行进的运载工具。无人运载工具可以以遥控模式、自主模式或部分自主模式操作。
[0003]
当无人运载工具以远程控制模式操作时,处于远程位置的飞行员或驾驶员可以通过经由无线链路发送到无人运载工具的命令来控制无人运载工具。当无人运载工具以自主模式操作时,无人运载工具通常基于预编程的导航航路点、动态自动化系统或这些的组合而移动。此外,一些无人运载工具可以以遥控模式和自主模式两者操作,并且在某些情况下可以同时进行。例如,作为示例,远程飞行员或驾驶员可能希望在手动执行另一任务(诸如,操作用于拾取物体的机械系统)时将导航交给自主系统。
[0004]
对于各种不同环境存在各种类型的无人运载工具。例如,对于在空中、在地面上、在水下和在太空中的操作存在无人运载工具。一般地,无人飞行器(uav)或无人机越来越受欢迎。随着它们的设计的完善和它们的功能的扩展,它们对于商业使用的适应性也预期提高。提高uav的效率和耐用性的设计将扩展其任务能力。
技术实现要素:
附图说明
[0005]
本发明的非限制性和非穷举性的实施方式参照以下附图来描述,其中除非另外指明,否则贯穿各个视图,相同的附图标记指代相同的部件。不是必须标记元件的所有实例以免在适当的地方使附图混乱。附图不一定按比例,而是将重点放在说明所描述的原理上。
[0006]
图1是根据本公开的一实施方式的飞行器的透视图,其中垂直推进单元的螺旋桨叶片处于展开位置。
[0007]
图2是根据本公开的一实施方式的飞行器的平面图,其中垂直推进单元的螺旋桨叶片处于收起位置。
[0008]
图3是根据本公开的一实施方式的推进单元的透视图,其中螺旋桨叶片处于展开位置。
[0009]
图4a是根据本公开的一实施方式的推进单元的透视图,其中螺旋桨叶片处于收起位置。
[0010]
图4b是根据本公开的一实施方式的推进单元的平面图,其中螺旋桨叶片处于收起位置。
[0011]
图4c是根据本公开的一实施方式的推进单元的侧视图,其中螺旋桨叶片处于收起
位置。
[0012]
图5a是根据本公开的一实施方式的具有折叠的螺旋桨叶片的推进单元的分解视图。
[0013]
图5b是根据本公开的一实施方式的包括垫圈凸缘、对准凸台和枢转止动件的基座插入间隔件的透视图。
[0014]
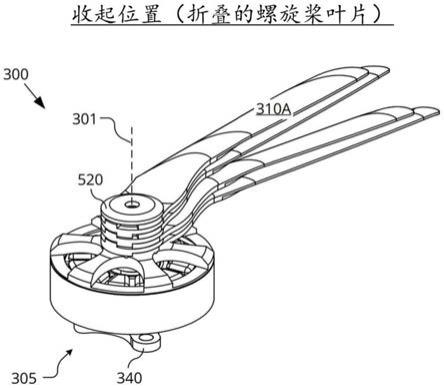
图6是根据本公开的一实施方式的具有折叠的螺旋桨叶片的推进单元的剖视图。
具体实施方式
[0015]
这里描述了用于折叠的螺旋桨叶片以减小气动阻力的系统、装置和操作方法的实施方式。在以下描述中,阐述了许多具体细节以提供对实施方式的透彻理解。然而,相关领域的技术人员将认识到,这里描述的技术可以在没有一个或更多个特定细节的情况下、或者在具有其它方法、部件、材料等的情况下实践。在另一些情况下,为了避免混淆某些方面,没有详细示出或描述公知的结构、材料或操作。
[0016]
在整个本说明书中对“一个实施方式”或“一实施方式”的引用表示结合该实施方式描述的特定特征、结构或特性被包括在本发明的至少一个实施方式中。因此,在整个本说明书中在各处出现的短语“在一个实施方式中”或“在一实施方式中”不必都指同一实施方式。此外,在一个或更多个实施方式中,特定特征、结构或特性可以以任何合适的方式组合。
[0017]
这里公开的实施方式描述了用于将螺旋桨叶片枢转地安装到电机转子的机械结构和技术,使得螺旋桨叶片能够从使用时的展开位置被动折叠到空闲时的收起位置。收起位置提供在向前飞行期间的减小的阻力。在一个实施方式中,螺旋桨叶片折叠到收起位置通过风阻被动地实现,而铺开回到展开位置通过枢转止动件实现,该枢转止动件将螺旋桨叶片接合到相对于彼此旋转偏移的位置。在另一实施方式中,惯性和电机制动也可以用于辅助将螺旋桨叶片被动折叠或主动启动折叠到收起位置。
[0018]
尽管螺旋桨叶片安装结构可用于各种运载工具应用,但是所描述的技术在具有用于水平和垂直推进的分开的推进单元的应用中特别有用。具体地,所描述的技术非常适合于垂直起飞和着陆的飞行器。
[0019]
图1和图2示出根据本公开的一实施方式的飞行器100。飞行器100的示出的实施方式是垂直起飞和着陆(vtol)无人飞行器(uav),其包括分别用于提供水平和垂直推进的分开的推进单元106和112。飞行器100是固定翼飞行器,顾名思义,其具有机翼组件102,当由推进单元106水平推进时该机翼组件102可以基于机翼形状和该飞行器的向前空速产生升力。图1是在垂直起飞或着陆期间操作的飞行器100的透视图,其中垂直推进单元112的螺旋桨叶片被展开以提供垂直推进。图2是以水平巡航模式操作的飞行器100的平面图,其中垂直推进单元112的螺旋桨叶片空闲(即不旋转)并被收起以减小在向前运动期间的阻力轮廓(drag profile)。如所示的,垂直推进单元112的螺旋桨叶片被收起并被动地对准以减小由于由飞行器100的向前运动导致的风阻引起的阻力。相反,由于当垂直推进单元112旋转时枢转止动件的接合,垂直推进单元112的螺旋桨叶片在图1中被展开。
[0020]
飞行器100的所示出的实施方式具有机体,该机体包括机翼组件102、机身104和吊杆组件110。在一个实施方式中,机身104是模块化的,并包括电池模块、航空电子模块和任务有效载荷模块。这些模块可以彼此分离并可以彼此机械固定以连续地形成机身或主体的
至少一部分。
[0021]
电池模块包括用于容纳向飞行器100供电的一个或更多个电池的腔体。航空电子模块容纳飞行器100的飞行控制电路,该飞行控制电路可以包括处理器和存储器、通信电子装置和天线(例如蜂窝收发器、wifi收发器等)以及各种传感器(例如全球定位传感器、惯性测量单元(imu)、磁罗盘等)。任务有效载荷模块容纳与飞行器100的任务相关的装置。例如,任务有效载荷模块可以包括用于保持和释放外部附接的有效载荷的有效载荷致动器。在另一实施方式中,任务有效载荷模块可以包括用于携带相机/传感器装置(例如相机、镜头、雷达、激光雷达、污染监测传感器、天气监测传感器等)的相机/传感器装置支架。
[0022]
如所示的,飞行器100包括定位在机翼组件102上的水平推进单元106,其可以每个包括电机、具有轴的电机转子以及螺旋桨叶片,用于水平地推进飞行器100。飞行器100的所示出的实施方式还包括固定到机翼组件102的两个吊杆组件110。垂直推进单元112被安装到吊杆组件110。垂直推进单元112也可以每个包括电机、具有轴的电机转子以及螺旋桨叶片,用于提供垂直推进。如上所述,垂直推进单元112可以在飞行器100正在下降(例如到达送达位置)、上升(例如在送达之后)或保持恒定高度的悬停模式期间使用。稳定器108(或尾翼)可以被包括在飞行器100中以在巡航期间控制俯仰并稳定飞行器的偏航(左转或右转)。在一些实施方式中,在巡航模式期间,垂直推进单元112被禁用,而在悬停模式期间,水平推进单元106被禁用。在另一些实施方式中,垂直推进单元112在巡航模式期间仅是低功率的,和/或水平推进单元106在悬停模式期间仅是低功率的。
[0023]
在飞行期间,飞行器100可以通过控制其俯仰、翻滚、偏航和/或高度来控制其运动的方向和/或速度。来自水平推进单元106的推力用于控制空速。例如,稳定器108可以包括一个或更多个舵108a,用于控制飞行器的偏航(以及由于所示的v型尾翼配置引起的俯仰),机翼组件102可以包括用于控制飞行器的翻滚的副翼102a。在另一些实施方式中,飞行器100可以包括用于独立控制俯仰的升降舵。作为另一示例,同时增大或减小所有螺旋桨叶片的速度可以分别导致飞行器100增大或减小其高度。
[0024]
对所示出的固定翼飞行器的许多变化是可能的。例如,具有更多机翼(例如,具有四个机翼的“x-机翼”配置)的飞行器也是可能的。尽管图1和图2示出一个机翼组件102、两个吊杆组件110、两个水平推进单元106和每个吊杆组件110的六个垂直推进单元112,但是应当理解,可以用更多或更少的这些部件来实现飞行器100的其它变型。此外,尽管图1和图2将推进单元(垂直和水平推进单元两者)示出为每个包括四个螺旋桨叶片,但是在各种实施方式中,推进单元可以包括两个、三个或多于四个的螺旋桨叶片。
[0025]
图3、图4a、图4b、图4c、图5a、图5b和图6是示出根据本公开的一实施方式的推进单元300(例如垂直推进单元112)的各个方面的不同视图。图3是具有处于展开位置的螺旋桨叶片的推进单元300的顶部透视图,图4a-图4c是具有处于收起位置的螺旋桨叶片的推进单元300的各种视图,图5a是推进单元300的分解图,图6是推进单元300的沿着图4b中的线a-a'的剖视图。
[0026]
推进单元300的所示出的实施方式包括电机基座305、螺旋桨叶片310a-310d(统称310)、插入间隔件515a-515c(统称515)、固定盖520和机械紧固件525。电机基座305的所示出的实施方式包括电机转子、定子637和电机安装件340。电机转子的所示出的实施方式包括转子轴632、突出的脊534和转子钟形件335。螺旋桨叶片310的所示出的实施方式每个包
括近端基座545和远端末端555。近端基座545每个包括切口550和孔551。插入间隔件515a的所示出的实施方式包括设置在垫圈凸缘565上的枢转止动件560a和560b,垫圈凸缘565具有孔570、对准凸台575和凹陷580。插入间隔件515b-515c的所示出的实施方式每个包括枢转止动件560a和560c以及具有孔585的垫圈凸缘565。应当理解,并非所有元件的实例都已经被标记从而不使附图过于混乱。
[0027]
如图3和图4a所示,螺旋桨叶片310以允许它们从铺开的展开位置(图3)枢转到折叠的收起位置(图4a)的方式安装到电机基座305。从铺开到折叠或从折叠到铺开的转变可以是被动控制的转变,或者被主动启动。当电机转子旋转时,螺旋桨叶片310展开(铺开),并且螺旋桨叶片的惯性/阻力引起枢转止动件560a和560c与螺旋桨叶片310的近端基座545中的切口550接合。这种接合将螺旋桨叶片310旋转地加速到展开位置。在一个实施方式中,最底部的螺旋桨叶片310d非枢转地附接到电机转子,以与电机转子的固定关系绕中心旋转轴线301旋转。相反,螺旋桨叶片310a-310c枢转地附接到电机转子以独立于电机转子绕中心旋转轴线301相对于彼此枢转有限的角度。
[0028]
参照图5a,枢转止动件560a和560c对着切口550的末端接合以使螺旋桨叶片310a-310c旋转但也在切口550内滑动从而允许相对于彼此和相对于电机转子的有限的枢转量以允许折叠到收起位置。当电机转子停止旋转时,由于飞行器100的向前运动引起的风阻导致螺旋桨叶片310a-310d枢转到较小截面的、较低阻力的收起位置。因此,收起位置减小了推进单元300在垂直于中心旋转轴线301的方向上的阻力轮廓。图4a、图4b和图4c示出这种减小的阻力轮廓的不同视图。
[0029]
图5a和图5b示出有助于螺旋桨叶片310a-310c的被限制的枢转的枢转止动件的细节。如所示的,枢转止动件560是集成到插入间隔件515中的突起。在另一些实施方式中,枢转止动件560可以是附接到插入间隔件515的柱、紧固件或另外的部件。插入间隔件515被插入在每个螺旋桨叶片310之间。在所示出的实施方式中,最底部的插入间隔件515a包括对准凸台575,其通过螺旋桨叶片310a-310c的孔551和其它插入间隔件515b和515c的孔585插入。对准凸台575用于多种目的。首先,对准凸台575定位并对准上部的螺旋桨叶片310a-310c和插入间隔件515b-515c以绕中心旋转轴线301旋转。第二,对准凸台575用作上部的螺旋桨叶片310a-310c的旋转轴承。第三,对准凸台575是固定盖520通过机械紧固件525被夹持到其的固定长度偏移。对准凸台575被设计为具有合适的长度,用于夹持螺旋桨叶片310a-310c的近端基座545以限制螺旋桨叶片310a-310c的过度倾斜或二面角弯曲(dihedral bending)、同时允许螺旋桨叶片310a-310c相对于彼此枢转。实际上,对准凸台575的长度应当被选择为使得螺旋桨叶片310a-310c将在推进单元300不旋转时仅在飞行器100的典型巡航速度下的风阻的影响下枢转到收起位置。
[0030]
在一个实施方式中,螺旋桨叶片310的折叠可以通过电机的短的反向转矩脉冲来主动地触发/启动。这些电机转矩脉冲可以使电机反向短暂旋转(或仅减速)(例如小于旋转一周)以启动折叠,其由风阻被动地对准。因此,叶片惯性可以用来帮助主动地启动折叠到收起位置。在一些实施方式中,由于螺旋桨叶片自身上的有限的风阻,小的螺旋桨叶片直径可能需要反向扭矩脉冲以启动折叠。
[0031]
插入间隔件515每个包括具有加宽表面的垫圈凸缘565,其有助于控制螺旋桨叶片310的二面角弯曲,而且用于使螺旋桨叶片310沿中心旋转轴线301相对于彼此偏移一固定
的偏移。每个螺旋桨叶片310的这种“垂直”偏移有助于将螺旋桨叶片310折叠到收起位置,而不将空气动力学表面(例如,螺旋桨叶片的前缘或后缘等)彼此卡住。在一个实施方式中,由垫圈凸缘565提供的垂直偏移被最小化。在一个实施方式中,垫圈凸缘565被集成到螺旋桨叶片310的近端基座545中。这种垂直的安装偏移还有助于沿着中心旋转轴线301同心地安装螺旋桨叶片310的孔551,使得所有螺旋桨叶片310绕共同的轴线(即中心旋转轴线301)旋转。当螺旋桨叶片310被收起时,螺旋桨叶片310的同心安装使其自身适合于减小的截面轮廓。
[0032]
在所示出的实施方式中,下部的螺旋桨叶片310d以固定关系安装到电机转子。换句话说,螺旋桨叶片310d相对于电机转子不具有有限的枢转量。在一个实施方式中,螺旋桨叶片310d是不独立于电机转子枢转的唯一螺旋桨叶片。因此,当螺旋桨叶片310d在风阻的影响下折叠到收起位置时,螺旋桨叶片310d也使电机转子旋转。在所示出的实施方式中,插入间隔件515a在通过对准凸台575从机械紧固件525转移的邻接压力的作用下将螺旋桨叶片310d的近端基座545牢固地夹持到电机转子。在所示出的实施方式中,枢转止动件560b大于其它枢转止动件560c。在一个实施方式中,枢转止动件560b定尺寸为与螺旋桨叶片310d上的切口550匹配从而不允许相对于电机转子的任何枢转。而是,枢转止动件560b用作突出部分(ledge)以平衡来自机械紧固件525的压力。
[0033]
插入间隔件515a还包括在垫圈凸缘565的底侧中的凹陷580。凹陷580定尺寸为与电机转子上的突出的脊534匹配。凹陷580是对准特征,其将上部部件(螺旋桨叶片310和插入间隔件515)定中心在电机转子的中心旋转轴线301上。在一个实施方式中,突出的脊534是转子轴632的对接端。在另一些实施方式中,突出的脊534可以是转子钟形件335的部件。
[0034]
枢转止动件560在完全展开时以相等的旋转分隔角度分布螺旋桨叶片310的铺开。因此,在所示出的具有四个螺旋桨叶片310的推进单元300的实施方式中,当完全展开时螺旋桨叶片310之间的中心到中心的旋转偏移为90度。但是,这里所述的螺旋桨安装技术同样适用于具有两个、三个或更多个螺旋桨叶片的推进单元。在双螺旋桨配置中,枢转止动件560将螺旋桨叶片按180度分布。在三螺旋桨配置中,枢转止动件560将螺旋桨叶片按120度分布。当然,插入间隔件515的数量将基于螺旋桨叶片的数量而改变。
[0035]
在所示出的实施方式中,枢转止动件560被集成到插入间隔件515中。这种设计允许使用单个公共螺旋桨叶片310的多个实例。然而,在另一些设计中,枢转止动件506可以被集成到每个螺旋桨叶片310的近端基座545中。替代地,单个枢转止动件560可以被集成到转子钟形件335中,并且对于螺旋桨叶片310,每个切口550的末端交错。
[0036]
本发明的所示出的实施方式的以上描述(包括在摘要中描述的内容)并不旨在是穷举的或将本发明限制为所公开的精确形式。尽管这里出于说明性的目的描述了本发明的特定实施方式和用于本发明的示例,但是如相关领域的技术人员将认识到的,在本发明的范围内可以进行各种修改。
[0037]
根据以上详细描述可以对本发明进行这些修改。在所附权利要求中使用的术语不应被解释为将本发明限制为说明书中公开的特定实施方式。而是,本发明的范围将完全由所附权利要求书确定,所附权利要求书将根据权利要求解释的既定原则来解释。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1