一种利用水流充电的无人机的制作方法
[0001]
本发明涉及水利发电设备领域,具体为一种利用水流充电的无人机。
背景技术:
[0002]
众所周知,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,民用无人机涉及警用、城市管理、农业、地质、气象、电力、抢险救灾、视频拍摄等行业,用途广泛,目前无人机续航时间较短,人们日常外出使用无人机时,需要携带多块电池,但长期在外时用完的电池无法及时得到充能,一般无人机也不防水,如果意外失控落入水中会被水流冲走,增大搜寻难度,因此需要设计一种利用水流充电的无人机来解决上述问题。
技术实现要素:
[0003]
本发明的目的在于提供一种利用水流充电的无人机,用于克服现有技术中的上述缺陷。
[0004]
本发明是通过以下技术方案来实现的。本发明的一种利用水流充电的无人机,包括机身,所述机身内包括控制腔;所述控制腔内设有机械手机构、固定机构,所述机身上端固定设有飞行机构,所述机身左右端固定设有左右对称的支架,所述支架下端滑动设有第一滑块,所述第一滑块上端固定设有穿过所述支架的第二连杆,所述第一滑块上端与所述支架之间连接设有第二弹簧,所述支架下端设有排气口,所述机身左右端转动设有前后对称的第一铰接轴,所述第一铰接轴与所述第二连杆之间铰接设有第一连杆,所述控制腔后端固定设有左右对称的发射管,所述发射管内设有第一滑槽,所述第一滑槽内从上到下依次滑动设有推块、锚杆,所述推块与所述第一滑槽上端之间连接设有第一弹簧,所述发射管靠所述控制腔中心侧端壁上铰接设有左右对称的导向轮,所述控制腔后端转动设有左右对称的第一转动轴,所述第一转动轴从前到后依次固定设有第一皮带轮、线轮、第一齿轮,所述锚杆上端与所述线轮之间连接设有绕过所述导向轮的线,所述锚杆在远离所述控制腔中心的一侧固定设有弹簧膜片,所述发射管上设有触发槽,在所述弹簧膜片能够在向下运动过程中卡在所述触发槽中,所述触发槽内滑动设有触发块,所述触发块与远离所述控制腔中心侧一端的所述触发槽之间连接设有第四弹簧,所述触发块能够将所述弹簧膜片推出所述触发槽,所述第一连杆转动能够压动所述触发块,所述控制腔后端设有左右对称的第二滑槽,所述第二滑槽内滑动设有第二滑块,所述第二滑块上端与所述第二滑槽上端之间连接设有第三弹簧,所述第二滑块能够与所述第一齿轮啮合,所述第二滑块下端固定设有发电扇叶模组。
[0005]
可优选的,所述控制腔前后端之间固定设有左右对称的固定板,所述固定板之间固定设有电机,所述电机前后端转动设有电机轴,所述电机轴后端固定设有第一锥齿轮,所述控制腔前端转动设有第四转动轴,所述第四转动轴上固定设有第四皮带轮,所述第四转动轴后端与所述电机轴前端上固定设有前后对称的联轴器,所述电机上端固定设有液压杆,所述液压杆前端固定设有与所述电机轴转动和连接的连接块,所述控制腔后端转动设
有左右对称的第二转动轴,所述第二转动轴从前到后依次固定设有第二皮带轮、第二齿轮,所述第二皮带轮与所述第一皮带轮之间连接设有第一皮带,所述控制腔后端转动设有第三转动轴,所述第三转动轴上从前到后依次固定设有第三皮带轮、第三齿轮,所述第三齿轮能够与两侧所述第二齿轮啮合,所述第三皮带轮与所述第四皮带轮之间连接设有第二皮带。
[0006]
可优选的,所述控制腔后端挡板上下端之间转动设有蜗杆,所述蜗杆上端固定设有第二锥齿轮,所述第二锥齿轮能够与所述第一锥齿轮啮合,所述控制腔后端转动设有左右对称的两根第四铰接轴,所述第四铰接轴从前到后依次固定设有第五连杆、蜗轮,所述蜗轮前端与所述第五连杆之间铰接设有第三铰接轴,所述控制腔后端转动设有左右对称的两根第二铰接轴,所述第二铰接轴上端铰接设有第四连杆,所述第四连杆与所述第五连杆之间铰接设有第三连杆,所述第三连杆前端铰接设有夹块,所述蜗杆下端的蜗杆能够与两侧所述蜗轮啮合。
[0007]
本发明的有益效果 :本发明结构简单,操作简便,具有较高的一体化程度,本发明能够在无人机失去控制坠机落入水中时候利用支架浮在水面上,水压能够启动固定机构,将锚射入水中,将无人机固定在落点附近,方便机主搜寻收回,本发明也可以主动停在水上利用水流发电,避免因长期在外续航不足的问题,本发明下端还设有机械手,可以执行更多其他扩展任务。
附图说明
[0008]
为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0009]
下面结合附图和实施例对本发明进一步说明。
[0010]
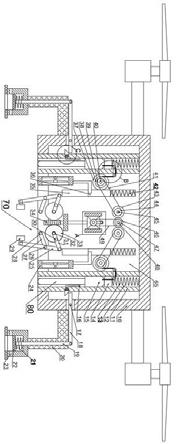
图 1 是本发明实施例的结构示意图;图 2 是图1中a的结构放大示意图;图 3 是图1中b的结构放大示意图;图 4 是图1中c的结构放大示意图;图 5 是图2中d-d的结构示意图。
具体实施方式
[0011]
下面结合图1-5对本发明进行详细说明,其中,为叙述方便,现对下文所说的方位规定如下:下文所说的上下左右前后方向与图1本身投影关系的上下左右前后方向一致。
[0012]
结合附图1-5所述的一种利用水流充电的无人机,包括机身10,所述机身10内包括控制腔65,所述控制腔65内设有机械手机构70、固定机构80,所述机身10上端固定设有飞行机构66,所述机身10左右端固定设有左右对称的支架20,所述支架20下端滑动设有第一滑块22,所述第一滑块22上端固定设有穿过所述支架20的第二连杆19,所述第一滑块22上端与所述支架20之间连接设有第二弹簧21,所述支架20下端设有排气口23,所述机身10左右端转动设有前后对称的第一铰接轴17,所述第一铰接轴17与所述第二连杆19之间铰接设有第一连杆18,所述控制腔65后端固定设有左右对称的发射管11,所述发射管11内设有第一
滑槽12,所述第一滑槽12内从上到下依次滑动设有推块14、锚杆15,所述推块14与所述第一滑槽12上端之间连接设有第一弹簧13,所述发射管11靠所述控制腔65中心侧端壁上铰接设有左右对称的导向轮57,所述控制腔65后端转动设有左右对称的第一转动轴40,所述第一转动轴40从前到后依次固定设有第一皮带轮39、线轮38、第一齿轮37,所述锚杆15上端与所述线轮38之间连接设有绕过所述导向轮57的线56,所述锚杆15在远离所述控制腔65中心的一侧固定设有弹簧膜片16,所述发射管11上设有触发槽60,在所述弹簧膜片16能够在向下运动过程中卡在所述触发槽60中,所述触发槽60内滑动设有触发块58,所述触发块58与远离所述控制腔65中心侧一端的所述触发槽60之间连接设有第四弹簧59,所述触发块58能够将所述弹簧膜片16推出所述触发槽60,所述第一连杆18转动能够压动所述触发块58,所述控制腔65后端设有左右对称的第二滑槽35,所述第二滑槽35内滑动设有第二滑块36,所述第二滑块36上端与所述第二滑槽35上端之间连接设有第三弹簧42,所述第二滑块36能够与所述第一齿轮37啮合,所述第二滑块36下端固定设有发电扇叶模组24。
[0013]
有益地,所述控制腔65前后端之间固定设有左右对称的固定板50,所述固定板50之间固定设有电机51,所述电机51前后端转动设有电机轴62,所述电机轴62后端固定设有第一锥齿轮63,所述控制腔65前端转动设有第四转动轴52,所述第四转动轴52上固定设有第四皮带轮53,所述第四转动轴52后端与所述电机轴62前端上固定设有前后对称的联轴器61,所述电机51上端固定设有液压杆54,所述液压杆54前端固定设有与所述电机轴62转动和连接的连接块55,所述控制腔65后端转动设有左右对称的第二转动轴45,所述第二转动轴45从前到后依次固定设有第二皮带轮44、第二齿轮43,所述第二皮带轮44与所述第一皮带轮39之间连接设有第一皮带41,所述控制腔65后端转动设有第三转动轴48,所述第三转动轴48上从前到后依次固定设有第三皮带轮47、第三齿轮46,所述第三齿轮46能够与两侧所述第二齿轮43啮合,所述第三皮带轮47与所述第四皮带轮53之间连接设有第二皮带49。
[0014]
有益地,所述控制腔65后端挡板上下端之间转动设有蜗杆34,所述蜗杆34上端固定设有第二锥齿轮64,所述第二锥齿轮64能够与所述第一锥齿轮63啮合,所述控制腔65后端转动设有左右对称的两根第四铰接轴32,所述第四铰接轴32从前到后依次固定设有第五连杆31、蜗轮33,所述蜗轮33前端与所述第五连杆31之间铰接设有第三铰接轴30,所述控制腔65后端转动设有左右对称的两根第二铰接轴28,所述第二铰接轴28上端铰接设有第四连杆27,所述第四连杆27与所述第五连杆31之间铰接设有第三连杆25,所述第三连杆25前端铰接设有夹块29,所述蜗杆34下端的蜗杆能够与两侧所述蜗轮33啮合。
[0015]
以下结合图1至图5对本文中的的使用步骤进行详细说明:初始状态,所述电机51关闭,所述联轴器61断开,所述第一弹簧13处于压缩状态。
[0016]
当本发明落入水中时,所述支架20能够提供足够的浮力使得无人机浮在水面上,所述支架20下端的水挤压所述第一滑块22使其向上移动,所述第一滑块22向上移动带动所述第二连杆19向上移动,所述第二连杆19向上移动带动所述第一连杆18左端绕着所述第一铰接轴17向下转动,所述第一连杆18左端向下转动挤压触发块58,所述触发块58受压沿着所述触发槽60向其内滑动,所述触发块58滑动将所述弹簧膜片16从所述触发槽60内退出,失去所述弹簧膜片16限位后,所述推块14在所述第一弹簧13的作用下向下移动,所述推块14向下移动将所述锚杆15从所述第一滑槽12内射入水底,两根所述锚杆15插在水底从而轴向固定无人机的位置,方便机主寻找或者为水流发电固定机位;
所述锚杆15向下移动带动所述线56从所述线轮38内抽出,所述线56带动所述线轮38转动,所述线轮38转动带动所述第一转动轴40转动,所述第一转动轴40转动带动所述第一皮带轮39、第一齿轮37转动,所述第一齿轮37转动带动所述第二滑块36向下移动,所述第二滑块36向下移动带动所述发电扇叶模组24向下移动,所述发电扇叶模组24向下移动深入水中,利用水流发电。
[0017]
需要使用机械手时,所述电机51启动,所述电机51启动带动所述电机轴62转动,所述电机轴62转动带动所述第一锥齿轮63转动,所述第一锥齿轮63转动带动所述第二锥齿轮64转动,所述第二锥齿轮64转动带动所述蜗杆34转动,所述蜗杆34转动带动所述蜗轮33转动,所述蜗轮33转动带动所述第四铰接轴32、所述第三铰接轴30转动,所述第四铰接轴32、所述第三铰接轴30转动带动所述第五连杆31转动,所述第五连杆31正反转转动带动所述第三连杆25伸出或收回,若所述第三连杆25向前伸出则带动所述夹块29向下夹住目标,所述第三连杆25向后收回则将其放下。
[0018]
当充电完毕或者需要从水中取出时,所述液压杆54伸长,所述液压杆54伸长带动所述电机轴62向前移动,所述电机轴62向前移动使得所述第一锥齿轮63与所述第二锥齿轮64脱离啮合,所述电机轴62向前移动使得而所述联轴器61啮合,此时所述联轴器61连接所述第四转动轴52与所述电机轴62,所述电机51启动,所述电机51启动带动所述电机轴62转动,所述电机轴62转动带动所述第四转动轴52转动,所述第四转动轴52转动带动所述第四皮带轮53转动,所述第四皮带轮53转动带动所述第二皮带49转动,所述第二皮带49转动带动所述第三皮带轮47转动,所述第三皮带轮47转动带动所述第三转动轴48转动,所述第三转动轴48转动带动所述第三齿轮46转动,所述第三齿轮46转动带动所述第二齿轮43转动,所述第二齿轮43转动带动所述第二转动轴45转动,所述第二转动轴45转动带动所述第二皮带轮44转动,所述第二皮带轮44转动带动所述第一皮带41转动,所述第一皮带41转动带动所述第一皮带轮39转动,所述第一皮带轮39转动带动所述第一转动轴40转动,所述第一转动轴40转动带动所述第一齿轮37、所述线轮38转动,所述第一齿轮37转动带动所述第二滑块36向上收回,所述线轮38转动收回所述线56,所述线56收回将所述锚杆15收回,所述飞行机构66启动飞离水面,所述弹簧膜片16重新卡回所述触发槽60内。
[0019]
本发明的有益效果 :本发明结构简单,操作简便,具有较高的一体化程度,本发明能够在无人机失去控制坠机落入水中时候利用支架浮在水面上,水压能够启动固定机构,将锚射入水中,将无人机固定在落点附近,方便机主搜寻收回,本发明也可以主动停在水上利用水流发电,避免因长期在外续航不足的问题,本发明下端还设有机械手,可以执行更多其他扩展任务。
[0020]
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此领域技术的人士能够了解本发明内容并加以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1