分体式卫星在轨平台舱质量辨识方法及系统与流程
1.本发明涉及一种具有超高指向精度、超高稳定度(双超)卫星平台载荷舱的复合控制技术,具体地,涉及分体式卫星在轨平台舱质量辨识方法及系统。
背景技术:
2.未来先进航天器对姿态指向精度与稳定度的要求比目前水平高两个量级,传统采用载荷与平台固连式设计,两者动力学特性深度耦合,导致载荷双超指标难以实现,尽管采用主被动微振动抑制等方法取得了一定效果,但受限固连式设计的缺陷,双超指标难以实现。
[0003]“双超”卫星平台打破传统固连设计,采用非接触、高精度、无时延位移传感器实现仅安装安静部件的载荷舱与安装活动部件的平台舱分离,彻底消除微振动影响。改变传统以卫星平台为主的控制逻辑,首次采用“载荷舱主动,平台舱从动,两舱相对位置协同解耦控制”的全新方法,可实现载荷舱的双超精度。
[0004]
两舱质量的精确辨识是实现两舱间高精度位置控制的前提。分体式卫星包含载荷舱和平台舱,载荷舱主要由载荷及其支撑结构组成。在轨质量不变,可在地面精确测量得到。平台舱包含推进剂,在轨将不断消耗,因此平台舱质量是变化的,需要通过在轨辨识得到。两舱质量在相对位置前馈控制中是重要输入量。因此有必要通过在轨标定的方法获取精确的两舱质量位置信息。
[0005]
公开号为cn106249749a的专利文献“主从非接触双超卫星平台变质心变惯量姿态控制系统”,公开了一种主从非接触双超卫星平台变质心变惯量姿态控制系统,并没有解决两舱转动惯量位置精确辨识的技术难题。
[0006]
公开号为cn109870272a的专利文献“基于动量守恒的航天器质量在轨辨识方法”,公开了一种基于动量守恒的航天器质量在轨辨识方法,但其研究对象为一体式卫星。
[0007]
在文献[1][2][3][4]中,提出了基于不同算法的在轨航天器质量特性辨识方法,但其研究对象均为一体式卫星,不涉及且不适用于分体式卫星在分离状态下的质量特性辨识。
[0008]
[1]bergmann ev,walker bk,levy d r.mass property estimation for control of asymmetrical satellites[j].journal of guidance,control and dynamics,1987,10(2):483
‑
492.
[0009]
[2]bergmann e v,dzielski j.spacecraft mass property identification with torque
‑
generating control[j].journal of guidance,control,and dynamics,1990,13(2):99
‑
103.
[0010]
[3]wilson e,lages c,mah r.on
‑
line,gyro
‑
based,mass
‑
property identification for thruster
‑
controlled spacecraft using recursive least squares[c]//proceedings of the 45th midwest symposium on circuits and systems.moffett field,california,ames research center,aug.4
‑
7,2002
[0011]
[4]tanygin s,williams t.mass property estimation using coasting maneuvers[j].journal of guidance,control,and dynamics,1997,20(4):625
‑
632
技术实现要素:
[0012]
针对两舱非接触式“双超”卫星平台载荷舱高精度姿态控制的需求,本发明的目的是提供一种新型分体式卫星在轨平台舱质量辨识方法及系统。
[0013]
根据本发明的一个方面,提供一种新型分体式卫星在轨平台舱质量辨识方法,包括如下步骤:
[0014]
驱动步骤:将分体式卫星两舱间重复锁紧机构断电,给两舱间磁浮作动器通电,产生大小已知的磁控力,驱动分体式卫星两舱运动;
[0015]
采集步骤:使分体式卫星的控制系统保持开环不控,采集分体式卫星两舱的位移传感器测量信息,根据解算模型得到分体式卫星两舱质心相对运动信息;
[0016]
拟合微分步骤:对分体式卫星两舱质心相对运动信息进行二次拟合,将拟合结果两次微分得到分体式卫星两舱质心的加速度信息;
[0017]
平台舱质量解算步骤:结合已知的分体式卫星两舱间作用力、加速度信息和载荷舱质量信息,解算得到平台舱质量。
[0018]
优选地,所述驱动步骤中,两舱间配置多台磁浮作动器,用于完成载荷舱三轴姿态控制和两舱间相对位置控制,发送开环指令使磁浮作动器组合输出舱间磁控力,设作用于平台舱的磁控力为f
cb
,则作用于载荷舱的磁控力为
‑
f
cb
,设在舱间磁控力的作用下,平台舱加速度为a
b
,载荷舱加速度为a
p
,设载荷舱质量为m
p
,平台舱质量m
b
为,则根据牛顿第二运动定律有
[0019][0020]
设两舱间质心相对距离为p
cj
,且假设两舱间磁控力驱使两舱间距离变大,则有
[0021][0022]
式中,t为时间。
[0023]
优选地,所述采集步骤中,设两舱间三轴相对姿态为三轴相对质心位移为[δx δy δz],设两舱间布置9台位移传感器a1、a2、a3、b1、b2、b3、c1、c2和c3用于相对位置测量,设测量值分别为[δz
a1 δz
a2 δz
a3 δy
b1 δy
b2 δy
b3 δx
c1 δx
c2 δx
c3
],设9台位移传感器在机械坐标系的安装位置为[x
i y
i z
i
],i=a1,
…
c3,设在机械坐标系中的载荷舱质心位置为[x
pc y
pc z
pc
],则有相对位置和相对姿态与位移传感器测量值的关系如下:
[0024][0025]
设
[0026][0027]
b=[δz
a1 δz
a2 δz
a3 δy
b1 δy
b2 δy
b3 δx
c1 δx
c2 δx
c3
]
t
ꢀꢀ
公式5
[0028][0029]
则有
[0030]
a
·
x=b
ꢀꢀ
公式7
[0031]
根据伪逆算法,得到伪逆解
[0032]
x=a
t
·
(a
·
a
t
)
‑1·
b
ꢀꢀ
公式8
[0033]
从而得到三轴相对姿态和相对位置,得到解算矩阵为
[0034]
m=a
t
·
(a
·
a
t
)
‑1ꢀꢀ
公式9
[0035]
根据上述解算模型得到两舱间质心相对距离为p
cj
,则有
[0036]
p
cj
=[δx δy δz]
t
ꢀꢀ
公式10
[0037]
优选地,所述拟合微分步骤中,设两舱间质心相对距离为p
cj_nh
,通过拟合得到
[0038]
p
cj_nh
=p1·
t2+p2·
t+p3ꢀꢀ
公式11
[0039]
其中p1为二阶拟合系数,p2为一阶拟合系数,p3为常值系数,设两舱间相对运动的线加速度为a
cj
,则有
[0040]
a
cj
=2p1ꢀꢀ
公式12。
[0041]
优选地,所述平台舱质量解算步骤中,在舱间磁控力f
cb
的作用下,两舱间相对运动的线加速度又表示为
[0042][0043]
上式中,a
cj
、f
cb
和m
p
均为已知量,因此得到平台舱质量为
[0044][0045]
根据本发明的另一个方面,提出一种新型分体式卫星在轨平台舱质量辨识系统,包括如下模块:
[0046]
驱动模块:将分体式卫星两舱间重复锁紧机构断电,给两舱间磁浮作动器通电,产生大小已知的磁控力,驱动分体式卫星两舱运动;
[0047]
采集模块:使分体式卫星的控制系统保持开环不控,采集分体式卫星两舱的位移传感器测量信息,根据解算模型得到分体式卫星两舱质心相对运动信息;
[0048]
拟合微分模块:对分体式卫星两舱质心相对运动信息进行二次拟合,将拟合结果两次微分得到分体式卫星两舱质心的加速度信息;
[0049]
平台舱质量解算模块:结合已知的分体式卫星两舱间作用力、加速度信息和载荷舱质量信息,解算得到平台舱质量。
[0050]
优选地,所述驱动模块中,两舱间配置多台磁浮作动器,用于完成载荷舱三轴姿态控制和两舱间相对位置控制,发送开环指令使磁浮作动器组合输出舱间磁控力,设作用于平台舱的磁控力为f
cb
,则作用于载荷舱的磁控力为
‑
f
cb
,设在舱间磁控力的作用下,平台舱加速度为a
b
,载荷舱加速度为a
p
,设载荷舱质量为m
p
,平台舱质量m
b
为,则根据牛顿第二运动定律有
[0051][0052]
设两舱间质心相对距离为p
cj
,且假设两舱间磁控力驱使两舱间距离变大,则有
[0053][0054]
式中,t为时间。
[0055]
优选地,所述采集模块中,设两舱间三轴相对姿态为三轴相对质心位移为[δxδyδz],设两舱间布置9台位移传感器a1、a2、a3、b1、b2、b3、c1、c2和c3用于相对位置测量,设测量值分别为
[0056]
[δz
a1
δz
a2
δz
a3
δy
b1
δy
b2
δy
b3
δx
c1
δx
c2
δx
c3
],设9台位移传感器在机械坐标系的安装位置为[x
i y
i z
i
],i=a1,
…
c3,设在机械坐标系中的载荷舱质心位置为
[0057]
[x
pc y
pc z
pc
],则有相对位置和相对姿态与位移传感器测量值的关系如下:
[0058][0059]
设
[0060][0061]
b=[δz
a1
δz
a2
δz
a3
δy
b1
δy
b2
δy
b3
δx
c1
δx
c2
δx
c3
]
t
公式5
[0062]
则有
[0063]
a
·
x=b
ꢀꢀ
公式7
[0064]
根据伪逆算法,得到伪逆解
[0065]
x=a
t
·
(a
·
a
t
)
‑1·
b公式8从而得到三轴相对姿态和相对位置,得到解算矩阵为
[0066]
m=a
t
·
(a
·
a
t
)
‑1公式9根据上述解算模型得到两舱间质心相对距离为p
cj
,则有
[0067]
p
cj
=[δxδyδz]
t
公式10优选地,所述拟合微分模块中,设两舱间质心相对距离为p
cj_nh
,通过拟合得到
[0068]
p
cj_nh
=p1·
t2+p2·
t+p3公式11其中p1为二阶拟合系数,p2为一阶拟合系数,p3为常值系数,设两舱间相对运动的线加速度为a
cj
,则有
[0069]
a
cj
=2p1公式12
[0070]
优选地,所述平台舱质量解算模块中,在舱间磁控力f
cb
的作用下,两舱间相对运动的线加速度又表示为
[0071]
[0072]
上式中,a
cj
、f
cb
和m
p
均为已知量,因此得到平台舱质量为
[0073][0074]
与现有技术相比,本发明具有如下的有益效果:
[0075]
1.该方法可为分体式卫星在轨推进剂剩余量评估、相对位置控制提供技术支撑;
[0076]
2.通过两舱转动惯量在轨辨识方法的设计,实现两舱转动惯量的精确辨识;
[0077]
3.克服了在地面上受限于重力和展开部件的影响,难以准确辨识的技术难题。
附图说明
[0078]
通过阅读参照以下图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0079]
图1为新型分体式卫星在轨平台舱质量辨识原理示意图;
[0080]
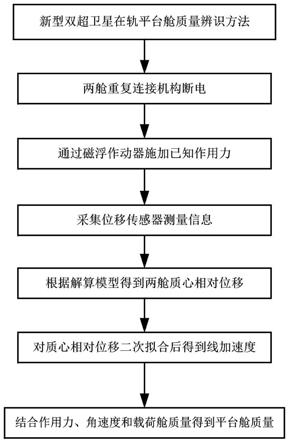
图2为新型分体式卫星在轨平台舱质量辨识方法示意图;
[0081]
图3为两舱间位移传感器测量曲线示意图;
[0082]
图4为两舱间质心相对距离测量和拟合示意图。
具体实施方式
[0083]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进,如磁浮作动器推力大小或方向变化、磁浮作动器安装位置和方位变化等。这些都属于本发明的保护范围。
[0084]
本发明提供一种新型分体式卫星在轨平台舱质量辨识方法,包括如下四个步骤:
[0085]
驱动步骤:将分体式卫星两舱间重复锁紧机构断电,给两舱间磁浮作动器通电,产生大小已知的磁控力,驱动分体式卫星两舱运动;
[0086]
采集步骤:使分体式卫星的控制系统保持开环不控,采集分体式卫星两舱的位移传感器测量信息,根据解算模型得到分体式卫星两舱质心相对运动信息;
[0087]
拟合微分步骤:对分体式卫星两舱质心相对运动信息进行二次拟合,将拟合结果两次微分得到分体式卫星两舱质心的加速度信息;
[0088]
平台舱质量解算步骤:结合已知的分体式卫星两舱间作用力、加速度信息和载荷舱质量信息,解算得到平台舱质量。
[0089]
所述驱动步骤中,两舱间配置多台磁浮作动器,用于完成载荷舱三轴姿态控制和两舱间相对位置控制,发送开环指令使磁浮作动器组合输出舱间磁控力,设作用于平台舱的磁控力为f
cb
,则作用于载荷舱的磁控力为
‑
f
cb
,设在舱间磁控力的作用下,平台舱加速度为a
b
,载荷舱加速度为a
p
,设载荷舱质量为m
p
,平台舱质量m
b
为,则根据牛顿第二运动定律有
[0090][0091]
设两舱间质心相对距离为p
cj
,且假设两舱间磁控力驱使两舱间距离变大,则有
[0092][0093]
式中,t为时间。
[0094]
所述采集步骤中,设两舱间三轴相对姿态为三轴相对质心位移为[δx δy δz],设两舱间布置9台位移传感器a1、a2、a3、b1、b2、b3、c1、c2和c3用于相对位置测量,设测量值分别为[δz
a1 δz
a2 δz
a3 δy
b1 δy
b2 δy
b3 δx
c1 δx
c2 δx
c3
],设9台位移传感器在机械坐标系的安装位置为[x
i y
i z
i
],i=a1,
…
c3,设在机械坐标系中的载荷舱质心位置为[x
pc y
pc z
pc
],则有相对位置和相对姿态与位移传感器测量值的关系如下:
[0095][0096]
设
[0097][0098]
b=[δz
a1 δz
a2 δz
a3 δy
b1 δy
b2 δy
b3 δx
c1 δx
c2 δx
c3
]
t
ꢀꢀ
公式5
[0099][0100]
则有
[0101]
a
·
x=b
ꢀꢀ
公式7
[0102]
根据伪逆算法,得到伪逆解
[0103]
x=a
t
·
(a
·
a
t
)
‑1·
b
ꢀꢀ
公式8从而得到三轴相对姿态和相对位置,得到解算矩阵为
[0104]
m=a
t
·
(a
·
a
t
)
‑1ꢀꢀ
公式9根据上述解算模型得到两舱间质心相对距离为p
cj
,则有
[0105]
p
cj
=[δx δy δz]
t
ꢀꢀ
公式10所述拟合微分步骤中,设两舱间质心相对距离为p
cj_nh
,通过拟合得到
[0106]
p
cj_nh
=p1·
t2+p2·
t+p3ꢀꢀ
公式11其中p1为二阶拟合系数,p2为一阶拟合系数,p3为常值系数,设两舱间相对运动的线加速度为a
cj
,则有
[0107]
a
cj
=2p1ꢀꢀ
公式12。
[0108]
所述平台舱质量解算步骤中,在舱间磁控力f
cb
的作用下,两舱间相对运动的线加速度又表示为
[0109][0110]
上式中,a
cj
、f
cb
和m
p
均为已知量,因此得到平台舱质量为
[0111][0112]
在本实施例中,参数设定规则如图2所示。设给定两舱间磁浮作用力力为0.02n,即
[0113]
f
cb
=0.02n
[0114]
系统处于开环无控状态,在两舱间磁控力的作用下,两舱间质心相对距离拟合结果如图4所示,根据拟合结果得到到相对运动的线加速度为
[0115]
a
cj
=2.5304
×
10
‑4m/s2[0116]
设载荷舱质量为110kg,则
[0117][0118]
与理论值280kg仅相差0.83kg,辨识精度优于0.3%。
[0119]
根据本发明的另一个方面,提出一种新型分体式卫星在轨平台舱质量辨识系统,包括如下模块:
[0120]
驱动模块:将分体式卫星两舱间重复锁紧机构断电,给两舱间磁浮作动器通电,产生大小已知的磁控力,驱动两舱运动;
[0121]
采集模块:控制系统保持开环不控,采集两舱将位移传感器测量信息,根据解算模型得到两舱质心相对运动信息;
[0122]
拟合微分模块:对质心相对运动信息进行二次拟合,将拟合结果两次微分得到两舱质心的加速度信息;
[0123]
平台舱质量解算模块:结合已知的舱间作用力、加速度信息和载荷舱质量信息,解
算得到平台舱质量。
[0124]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构
[0125]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1