一种锤体无人机样地仪的制作方法
1.本实用新型属于无人机样地仪领域,具体为一种锤体无人机样地仪。
背景技术:
2.现在到森林里去测量样地,树密草多,可视很差,林下的卫星信号比较差,传统方式测量误差较大,如果遇到测量的方向上有大树,必须进行砍伐才能测量,增加劳动强度,其次破环森林植被,且由于累计误差,最后测量无法形成闭合,或者闭合误差很大,达不到要求,工作推倒重来,费时费力。
3.现有的锤体无人机样地仪存在一些弊端,现有的锤体无人机样地仪往往无法做到对锤体结构稳定释放,且每次释放锤体结构会导致机体的中心偏移导致机体不稳;现有锤体无人机样地仪往往缺少对声光告警模块保护措施,且不方便回收再利用。
技术实现要素:
4.本实用新型的目的在于提供一种锤体无人机样地仪,本实用新型有效的解决了现有的锤体无人机样地仪往往无法做到对锤体结构稳定释放,且每次释放锤体结构会导致机体的中心偏移导致机体不稳;现有锤体无人机样地仪往往缺少对声光告警模块保护措施,且不方便回收再利用的技术问题。
5.本实用新型的目的可以通过以下技术方案实现:
6.一种锤体无人机样地仪,包括机体,所述机体的外侧安装有若干组连接架,所述连接架的一端安装有驱动组件;
7.所述机体的顶端安装有定位模块,贯穿所述机体的外侧安装有填充箱,所述填充箱的内侧靠底端安装有控制阀门一,且填充箱的内部安装有锤体结构,所述机体的底端安装有发射箱;
8.所述发射箱的顶端开设有发射槽,贯穿所述发射槽的两侧均安装有套杆,所述套杆的一端安装有液压缸,所述锤体结构包括上锤体与下锤体,所述下锤体的一端安装有按压杆,所述上锤体的一端安装有四组活动板,贯穿所述活动板的一侧安装有转轴。
9.作为本实用新型的进一步方案,所述填充箱的底端安装有控制阀门二,填充箱的内部呈倒梯形设置,填充箱的一侧靠顶端安装有填充门。
10.作为本实用新型的进一步方案,所述发射槽的底端安装有控制阀门三,套杆远离液压缸的一端安装有橡胶垫。
11.作为本实用新型的进一步方案,所述活动板的一端呈四分之一半圆弧设置,且活动板的一端安装有磁石,活动板的另一端呈弯折设置。
12.作为本实用新型的进一步方案,四组所述活动板的内侧安装有声光告警模块,按压杆的一端安装有弧形挡板,按压杆与上锤体和下锤体均滑动连接。
13.作为本实用新型的进一步方案,所述机体的内部安装有红外接收控制器,控制阀门一、控制阀门二、控制阀门三、声光告警模块和液压缸均与红外接收控制器通信连接。
14.作为本实用新型的进一步方案,所述驱动组件的内部安装有螺旋桨与电机,电机与螺旋桨传动连接。
15.本实用新型的有益效果:
16.本实用新型通过设置填充箱与发射箱,将锤体结构从填充门放入填充箱中,待机体飞行到定位地点后通过红外接收控制器将控制阀门一水平打开让填充箱中放置的锤体结构落下,配合填充箱的倒梯形设置让填充箱底端的体积较小,之后将控制阀门一水平关闭,控制阀门一与控制阀门二之间的体积只够放置一个锤体结构,之后打开控制阀门二将一个锤体结构落入发射箱订单的发射槽中,之后启动液压缸推动套杆将锤体结构从中部固定,之后打开控制阀门三,因为重力的影响下锤体的体积和重力较大让锤体结构配合套杆旋转至下锤体朝下,之后控制液压缸回收将锤体结构释放,实现了机体的稳定与锤体结构的稳定释放;
17.通过设置锤体结构,锤体结构掉落时因为重力影响让下锤体朝下与落点接触,当下锤体与落点接触后会按压按压杆,按压杆向上挤压触碰到活动板的一端,配合转轴将四组活动板向外旋转张开,从而将内部的声光告警模块展开启动,寻找到锤体结构将四组活动板向内合并配合磁石互相吸引固定,且活动板底部归位后将按压杆挤压回原来的位置,不仅在日常存放和下落过程中保护了告警模块,且方便回收与再利用。
附图说明
18.为了便于本领域技术人员理解,下面结合附图对本实用新型作进一步的说明。
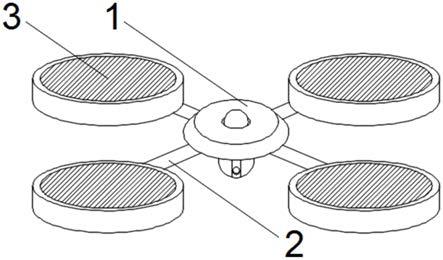
19.图1为本实用新型的整体结构示意图。
20.图2为本实用新型的机体的剖视图。
21.图3为本实用新型的发射箱的剖视图。
22.图4为本实用新型的锤体结构的剖视图。
23.图中:1、机体;2、连接架;3、驱动组件;4、定位模块;5、填充箱;6、控制阀门一;7、发射箱;8、锤体结构;9、套杆;10、液压缸;11、发射槽;12、下锤体;13、上锤体;14、活动板;15、转轴;16、按压杆。
具体实施方式
24.下面将结合实施例对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
25.如图1
‑
4所示,一种锤体无人机样地仪,包括机体1,机体1的外侧安装有若干组连接架2,连接架2的一端安装有驱动组件3;
26.机体1的顶端安装有定位模块4,贯穿机体1的外侧安装有填充箱5,填充箱5的内侧靠底端安装有控制阀门一6,且填充箱5的内部安装有锤体结构8,机体1的底端安装有发射箱7;
27.发射箱7的顶端开设有发射槽11,贯穿发射槽11的两侧均安装有套杆9,套杆9的一端安装有液压缸10,锤体结构8包括上锤体13与下锤体12,下锤体12的一端安装有按压杆
16,上锤体13的一端安装有四组活动板14,贯穿活动板14的一侧安装有转轴15。
28.填充箱5的底端安装有控制阀门二,填充箱5的内部呈倒梯形设置,填充箱5的一侧靠顶端安装有填充门。
29.发射槽11的底端安装有控制阀门三,套杆9远离液压缸10的一端安装有橡胶垫。
30.活动板14的一端呈四分之一半圆弧设置,且活动板14的一端安装有磁石,活动板14的另一端呈弯折设置。
31.四组活动板14的内侧安装有声光告警模块,按压杆16的一端安装有弧形挡板,按压杆16与上锤体13和下锤体12均滑动连接,通过设置活动板14实现了对声光告警模块的保护。
32.机体1的内部安装有红外接收控制器,控制阀门一6、控制阀门二、控制阀门三、声光告警模块和液压缸10均与红外接收控制器通信连接,通过设置红外接收控制器实现了对部件的远程控制。
33.驱动组件3的内部安装有螺旋桨与电机,电机与螺旋桨传动连接。
34.一种锤体无人机样地仪,在使用时将通过若干组驱动组件3配合连接架2带动机体1飞上森林上空,用定位模块4确定森林坐标和样地坐标,发射落锤体结构8落到地面,锤体结构8嵌入泥土或者树木,通过声光告警模块找到位置,插入标杆,样地所围起来面积完成,通过设置填充箱5与发射箱7,将锤体结构8从填充门放入填充箱5中,待机体1飞行到定位地点后通过红外接收控制器将控制阀门一6水平打开让填充箱5中放置的锤体结构8落下,配合填充箱5的倒梯形设置让填充箱5底端的体积较小,之后将控制阀门一6水平关闭,控制阀门一6与控制阀门二之间的体积只够放置一个锤体结构8,之后打开控制阀门二将一个锤体结构8落入发射箱7顶端的发射槽11中,之后启动液压缸10推动套杆9将锤体结构8从中部固定,之后打开控制阀门三,因为重力的影响下锤体12的体积和重力较大让锤体结构8配合套杆9旋转至下锤体12朝下,之后控制液压缸10回收将锤体结构8释放,实现了机体1的稳定与锤体结构8的稳定释放,通过设置锤体结构8,锤体结构8掉落时因为重力影响让下锤体12朝下与落点接触,当下锤体12与落点接触后会按压按压杆16,按压杆16向上挤压触碰到活动板14的一端,配合转轴15将四组活动板14向外旋转张开,从而将内部的声光告警模块展开启动,寻找到锤体结构8将四组活动板14向内合并配合磁石互相吸引固定,且活动板14底部归位后将按压杆16挤压回原来的位置,声光告警模块与定位模块4与红外接收控制器的型号分别为koojh065、xwx
‑
091、hw
‑
01x。
35.本实用新型通过设置填充箱5与发射箱7,将锤体结构8从填充门放入填充箱5中,待机体1飞行到定位地点后通过红外接收控制器将控制阀门一6水平打开让填充箱5中放置的锤体结构8落下,配合填充箱5的倒梯形设置让填充箱5底端的体积较小,之后将控制阀门一6水平关闭,控制阀门一6与控制阀门二之间的体积只够放置一个锤体结构8,之后打开控制阀门二将一个锤体结构8落入发射箱7订单的发射槽11中,之后启动液压缸10推动套杆9将锤体结构8从中部固定,之后打开控制阀门三,因为重力的影响下锤体12的体积和重力较大让锤体结构8配合套杆9旋转至下锤体12朝下,之后控制液压缸10回收将锤体结构8释放,实现了机体1的稳定与锤体结构8的稳定释放;通过设置锤体结构8,锤体结构8掉落时因为重力影响让下锤体12朝下与落点接触,当下锤体12与落点接触后会按压按压杆16,按压杆16向上挤压触碰到活动板14的一端,配合转轴15将四组活动板14向外旋转张开,从而将内
部的声光告警模块展开启动,寻找到锤体结构8将四组活动板14向内合并配合磁石互相吸引固定,且活动板14底部归位后将按压杆16挤压回原来的位置,不仅在日常存放和下落过程中保护了告警模块,且方便回收与再利用。
36.以上公开的本实用新型优选实施例只是用于帮助阐述本实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本实用新型。本实用新型仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1