一种抗风扰可倾斜转子的八旋翼飞行器
1.本实用新型涉及多旋翼飞行器技术领域,尤其是一种抗风扰可倾斜转子的八旋翼飞行器。
背景技术:
2.多旋翼飞行器被广泛地应用于航空摄影、测量等各种领域。就在不久前,有研究人员提出了将其应用于喷洒或林冠取样。这些应用需要飞行器接近在自然环境中的物体,这使得精确定位极其重要。然而,由于风场的湍流干扰的宽带宽和不可预测性,飞行器在这种环境中运行是一个挑战。标准多旋翼构型即旋翼沿共同轴线定向,只能通过姿态变化来保持水平位置,不是完美适用于干扰抑制情景。并且在复杂风场中,改变飞行器姿态有可能导致飞行器失事等严重后果。故而有必要设计一种能够在野外环境中工作,兼顾续航与准确操作性的旋翼飞行器,这也是本实用新型所致力的。
技术实现要素:
3.本实用新型提出一种抗风扰可倾斜转子的八旋翼飞行器,可优化多旋翼飞行器的抗风扰能力。
4.本实用新型采用以下技术方案。
5.一种抗风扰可倾斜转子的八旋翼飞行器,所述飞行器的旋翼中包括可倾斜旋翼;当飞行器工作于抗风扰工况以优化抗风性能时,所述可倾斜旋翼的旋翼所在平面相对于飞行器的机身水平面成倾斜角。
6.所述可倾斜旋翼以多自由度电机驱动;所述多自由度电机可调整转子倾斜角以使可倾斜旋翼的旋翼相对飞行器机身水平面倾斜。
7.所述飞行器设有机载风速检测装置和可控制旋翼倾斜姿态的飞控模块;当飞行器工作于低风速环境时,所述可倾斜旋翼的旋翼驱动轴垂直于飞行器的机身水平面,使飞行器以普通八轴旋翼飞行器的形态及工况运行以节省电力。
8.所述多自由度电机为转子具备三个方向上的自由度的三自由度电机;所述三个方向上的自由度,即在一个单一作用点处进行x轴、y轴的转子倾斜动作以驱动旋翼倾斜,还在该作用点处进行z轴的转子旋转动作以驱动旋翼旋转。
9.所述三自由度电机包括用于驱动所述三自由度电机转子旋转运动的直流无刷执行器、可倾斜的内部框架和固定于机身处的外部框架;
10.所述三自由度电机的转子设于内部框架处;
11.所述外部框架处设有音圈执行器和力矩执行器;所述音圈执行器转子、力矩执行器转子的输出轴经万向节与内部框架相连,驱动内部框架按所需角度倾斜,使三自由度电机的转子倾斜至所需姿态。
12.所述力矩执行器以永磁电机驱动,所述永磁电机包括倾斜执行器转子、倾斜执行器定子和缠绕线圈;所述倾斜执行器定子处的缠绕线圈可在单相电或双相电下工作;当需
减小尺寸以便于倾斜时,所述永磁电机以单相电供电;
13.所述内部框架处设有可对内部框架的倾斜过程进行监测的微传感器;所述微传感器包括惯性测量单元、编码器和分解器;所述内部框架的最大倾斜角为45度;所述直流无刷执行器以两个转子结构驱动可倾斜旋翼的旋翼驱动轴,直流无刷执行器具有可减少两个转子结构同步速度运行时的铁损的双气隙结构。
14.所述音圈执行器包括永磁体、音圈执行器定子、固定有线圈的线圈架和音圈执行器转子的转子背轭;音圈执行器以永磁体的磁化方向确定北极方向的x轴和南极方向的y轴;
15.音圈执行器定子和线圈架连接在音圈执行器底部的支撑板上形成底部结构,而转子背轭和永磁体连接在音圈执行器顶部的支架上形成顶部结构;所述顶部结构与三自由度电机的内部框架相连以驱动其倾斜;
16.所述顶部结构和底部结构通过万向节连接,当顶部结构相对底部结构倾斜时,永磁体的磁场方向也随之改变;所述音圈执行器利用永磁体提供的磁场,产生与线圈架处线圈的电流成比例的扭矩;
17.所述音圈执行器为无齿轮、无齿隙的电机驱动结构;所述电机驱动结构可提供没有滞后损失、易控制的恒定高扭矩,且可实现平衡和准确的转子定位;
18.当顶部结构处于初始角度时,若电流流过线圈,则音圈执行器根据极化方式和重力产生负扭矩,当供电电流中断后,顶部结构通过回复力返回到角度为0度的低功率工况;
19.当顶部结构的倾斜角变化时,音圈执行器的线圈电感也随之改变;
20.所述转子后轭设有包括倾斜操作范围的扩展结构以自电阻随倾斜角的变化;在永磁体的北极和南极之间设有磁芯以使转子后轭表现出最小的基本动态稳定性;
21.所述转子背轭朝向端部的方向逐渐变细,以使带凸极的音圈执行器转子的开口最大且电感最小;
22.所述永磁体在线圈中产生的磁通量、磁阻与可倾斜旋翼的倾斜角度大小相关,以实现对音圈执行器的无传感器控制;
23.当可倾斜旋翼的倾斜角为0
°
时,音圈执行器转子和定子铁芯之间的气隙长度最小以增加磁通量;当可倾斜旋翼的倾角为20
°
时,转子和定子铁芯之间的长度最大以降低磁通量。
24.一种抗风扰可倾斜转子的八旋翼飞行器控制方法,以上所述飞行器的八个旋翼均为可倾斜旋翼;飞行器旋翼的驱动方式包括常规驱动形式、中间驱动形式和倾斜驱动形式;
25.当飞行器旋翼工作于常规驱动形式时,各可倾斜旋翼的旋翼驱动轴均与机身水平面垂直,以提供最长的续航时间;
26.当飞行器旋翼工作于中间驱动形式时,以两对可倾斜旋翼转为倾斜姿态进行驱动,其余可倾斜旋翼的旋翼驱动轴按常规驱动形式与机身水平面保持垂直,以在提升飞行器抗风扰性能的同时兼顾飞行器的续航时间;
27.当飞行器旋翼工作于倾斜驱动形式时,各可倾斜旋翼的旋翼驱动轴均与机身水平面保持相同的倾斜角进行工作,以使飞行器具有最佳的抗风扰性能和空间保持能力。
28.所述可倾斜旋翼的旋翼可相对于机身水平面进行0度至31度范围的匀速倾斜调整,所述倾斜调整在5秒内完成;
29.所述飞行器的飞控模块以机载风速检测装置实时获取环境中的风速信息,并根据风速信息自动调整可倾斜旋翼的驱动方式;当可倾斜旋翼的驱动方式由飞控模块自动调整时,
30.若风速为0
‑
2.5m/s时,飞行器旋翼工作于常规驱动形式;
31.若风速为2.5
‑
5m/s,或在此风速环境下仅偶然出现瞬时风速大于5m/s时,飞行器旋翼工作于中间驱动形式;
32.若风速大于5m/s,飞行器旋翼工作于倾斜驱动方式。
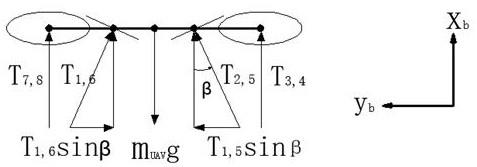
33.所述飞行器的飞行器模型为二维刚体模型;
34.飞行器的运动方程为
[0035][0036]
其中,t、t
h
和m分别是垂直推力、水平推力和产生的力矩;多旋翼飞行器框架产生的空气动力和力矩由和m
areo
表示;
[0037]
驱动旋翼的电机转子产生的力和力矩以公式表述为
[0038][0039]
其中,c
t
是转子推力常数,ω
i
是转子的转速。注意,公式二中的因子2用于说明x
b
‑
z
b
平面的对称性;
[0040]
转子的运动方程以公式表述为
[0041][0042]
其中,v0是电机的标称电压,i0是空载电流,r是电机电阻,k
v
是电机速度常数,c
τ
是转子气动扭矩常数,j
rotor
是转子惯性。v
i
是电机i的输入电压,对于飞行器的动力控制,有以下公式:
[0043][0044]
其中v
t
是一个用于控制总体推力的电压命令,而v
m
生成一个俯仰力矩;
[0045]
对于飞行器的水平推力控制,电机的输入电压以公式表述为
[0046][0047]
其中是用于产生沿x
b
轴水平推力的电压指令;v1和v4中包含的附加项tan(22.5
°
)用于抵消电压指令产生水平推力分量时生成的俯仰力矩;
[0048]
作用在旋翼飞行器上的空气动力和力矩模型通过全尺寸四轴飞行器的风洞试验获得;将飞行器和旋翼的尺寸及旋翼的数量进行外推,可计算旋翼飞行器的空气动力和力矩;空气动力和力矩由下式给出:
[0049][0050]
其中ρ是空气的密度,a
prop
是螺旋桨的后掠面积,a
uav
是机翼的有效面积,是所有旋翼的平均速度,n
rotor
是旋翼的数量;
[0051]
设模型中的飞行器以完美控制器进行控制,使飞行器的表观风速和迎角不受飞行器运动的影响;
[0052]
所述旋翼飞行器的气动系数模型适用于
‑
180
°
~180
°
迎角范围,所述模型通过使用最小二乘优化将傅立叶级数拟合到实验测试的系数而获得,以公式表述为;
[0053][0054]
其中λ是叶尖速比,由下式给出:
[0055][0056]
参数a1和a2由下式给出:
[0057][0058]
出于对称性考虑,用于模拟和的函数必须是关于α=
‑
90
°
,+90
°
的奇函数;
[0059]
当计算时,假设旋翼飞行器关于x
b
‑
y
b
平面对称,即意味着和的函数
也必须大约为α=0
°
;
[0060]
所述和的值在α=
‑
90
°
,+90
°
时必须为零;
[0061]
对于与相关的空气动力系数,在假设旋翼飞行器关于y
b
‑
z
b
和x
b
‑
z
b
平面对称的情况下,用于模拟这些系数的函数必须是关于α=
‑
90
°
,+90
°
的偶函数。
[0062]
本实用新型所述飞行器,在室内等低风速场合下,以普通八轴旋翼飞行器状态运行,以降低能耗。在湍流风场内或用户需要时,凭借三自由度旋翼电机,可自动或手动将多对可倾斜旋翼设置为倾斜状态。这使多旋翼飞行器无需改变姿态,就能产生水平推力,提高了飞行稳定性。通过将这两种旋翼驱动方法结合,可以提高旋翼飞行器在风扰中的保持性能,同时减少高频姿态修正。这使得飞行器在野外环境中运行的能力得到了提高。
[0063]
本实用新型所述的飞行器提出了一种固定的倾斜旋翼构型,这种构型具有提高响应的能力,因为飞行器不需要改变姿态就能产生水平推力,由于最少只需要一对转子绕正交轴倾斜,从而简化了常规控制器设计。
[0064]
在目标风速下,本实用新型倾斜旋翼提供的带宽比常规驱动形式提供的带宽高一个数量级,并且不会随着风速的改变而改变。两种驱动方法的带宽可以与预期在运行中遇到的典型湍流谱进行比较。在较高的风速条件下,倾斜转子允许额外的扰动缓解。较高频率下较低的扰动幅度意味着,与常规驱动转子相比,倾斜转子驱动产生的较低水平推力可忽略不计,并且能够有效抵抗风扰。本实用新型通过将常规旋翼和可倾斜旋翼结合,可以有效提高空间位置保持性能,同时减少高频姿态变化。
[0065]
本实用新型允许用户设置优先级高于不同风速下的默认旋翼驱动方案;即用户可在任意风速场景下,设置任意一种旋翼驱动形式(例如在0
‑
5m/s风速下,将旋翼设置为倾斜驱动形式,以获取更佳的抗风扰性能)。
[0066]
与现有技术相比,本实用新型的有益效果是:可根据风速手动或自动调节倾斜旋翼的数量,以提高在空间中的悬停能力及抗风扰性能。其他旋翼以常规旋翼驱动方式运行,以减小电量消耗。
附图说明
[0067]
下面结合附图和具体实施方式对本实用新型进一步详细的说明:
[0068]
附图1a为本实用新型所述飞行器的俯视向示意图;
[0069]
附图1b为本实用新型所述飞行器的正向示意图;
[0070]
附图2为一对可倾斜旋翼的倾斜动作示意图;
[0071]
附图3为本实用新型所述飞行器的模型自由体示意图;
[0072]
附图4为本实用新型所述三自由度电机的俯视向结构示意图;
[0073]
附图5为本实用新型所述三自由度电机的内部示意图;
[0074]
附图6为本实用新型所述直流无刷执行器的结构示意图;
[0075]
附图7为本实用新型所述音圈执行器的结构示意图;
[0076]
附图8为本实用新型所述音圈执行器的工作原理示意图;
[0077]
附图9a为高电感倾斜角度下的音圈执行器的局部示意图;
[0078]
附图9b为低电感倾斜角度下的音圈执行器的局部示意图;
[0079]
附图10为力矩执行器的原理示意图;
[0080]
图中:1
‑
可倾斜旋翼;2
‑
机身;3
‑
外部框架;4
‑
内部框架;5
‑
直流无刷执行器;6
‑
双气隙结构;7
‑
力矩执行器;8
‑
旋翼驱动轴;9
‑
音圈执行器;10
‑
直流无刷执行器的转子结构;11
‑
万向节;12
‑
微传感器;13
‑
永磁体;14
‑
转子背轭;15
‑
线圈;16
‑
线圈座;17
‑
支撑板;18
‑
音圈执行器定子;19
‑
倾斜执行器转子;20
‑
倾斜执行器定子;21
‑
缠绕线圈。
具体实施方式
[0081]
如图所示,一种抗风扰可倾斜转子的八旋翼飞行器,所述飞行器的旋翼中包括可倾斜旋翼1;当飞行器工作于抗风扰工况以优化抗风性能时,所述可倾斜旋翼的旋翼所在平面相对于飞行器的机身2水平面成倾斜角。
[0082]
所述可倾斜旋翼以多自由度电机驱动;所述多自由度电机可调整转子倾斜角以使可倾斜旋翼的旋翼相对飞行器机身水平面倾斜。
[0083]
所述飞行器设有机载风速检测装置和可控制旋翼倾斜姿态的飞控模块;当飞行器工作于低风速环境时,所述可倾斜旋翼的旋翼驱动轴垂直于飞行器的机身水平面,使飞行器以普通八轴旋翼飞行器的形态及工况运行以节省电力。
[0084]
所述多自由度电机为转子具备三个方向上的自由度的三自由度电机;所述三个方向上的自由度,即在一个单一作用点处进行x轴、y轴的转子倾斜动作以驱动旋翼倾斜,还在该作用点处进行z轴的转子旋转动作以驱动旋翼旋转。
[0085]
所述三自由度电机包括用于驱动所述三自由度电机转子旋转运动的直流无刷执行器5、可倾斜的内部框架4和固定于机身处的外部框架3;
[0086]
所述三自由度电机的转子设于内部框架处;
[0087]
所述外部框架处设有音圈执行器9和力矩执行器7;所述音圈执行器转子、力矩执行器转子的输出轴经万向节11与内部框架相连,驱动内部框架按所需角度倾斜,使三自由度电机的转子倾斜至所需姿态。
[0088]
所述力矩执行器以永磁电机驱动,所述永磁电机包括倾斜执行器转子19、倾斜执行器定子20和缠绕线圈21;所述倾斜执行器定子处的缠绕线圈可在单相电或双相电下工作;当需减小尺寸以便于倾斜时,所述永磁电机以单相电供电;
[0089]
所述内部框架处设有可对内部框架的倾斜过程进行监测的微传感器12;所述微传感器包括惯性测量单元、编码器和分解器;所述内部框架的最大倾斜角为45度;
[0090]
所述直流无刷执行器以两个转子结构10驱动可倾斜旋翼的旋翼驱动轴8,直流无刷执行器具有可减少两个转子结构同步速度运行时的铁损的双气隙结构6。
[0091]
所述音圈执行器包括永磁体13、音圈执行器定子18、固定有线圈15的线圈架16和音圈执行器转子的转子背轭14;音圈执行器以永磁体的磁化方向确定北极方向的x轴和南极方向的y轴;
[0092]
音圈执行器定子和线圈架连接在音圈执行器底部的支撑板17上形成底部结构,而转子背轭和永磁体连接在音圈执行器顶部的支架上形成顶部结构;所述顶部结构与三自由度电机的内部框架相连以驱动其倾斜;
[0093]
所述顶部结构和底部结构通过万向节连接,当顶部结构相对底部结构倾斜时,永磁体的磁场方向也随之改变;所述音圈执行器利用永磁体提供的磁场,产生与线圈架处线
圈的电流成比例的扭矩;
[0094]
所述音圈执行器为无齿轮、无齿隙的电机驱动结构;所述电机驱动结构可提供没有滞后损失、易控制的恒定高扭矩,且可实现平衡和准确的转子定位;
[0095]
当顶部结构处于初始角度时,若电流流过线圈,则音圈执行器根据极化方式和重力产生负扭矩,当供电电流中断后,顶部结构通过回复力返回到角度为0度的低功率工况;
[0096]
当顶部结构的倾斜角变化时,音圈执行器的线圈电感也随之改变;
[0097]
所述转子后轭设有包括倾斜操作范围的扩展结构以自电阻随倾斜角的变化;在永磁体的北极和南极之间设有磁芯以使转子后轭表现出最小的基本动态稳定性;
[0098]
所述转子背轭朝向端部的方向逐渐变细,以使带凸极的音圈执行器转子的开口最大且电感最小;
[0099]
所述永磁体在线圈中产生的磁通量、磁阻与可倾斜旋翼的倾斜角度大小相关,以实现对音圈执行器的无传感器控制;
[0100]
当可倾斜旋翼的倾斜角为0
°
时,音圈执行器转子和定子铁芯之间的气隙长度最小以增加磁通量;当可倾斜旋翼的倾角为20
°
时,转子和定子铁芯之间的长度最大以降低磁通量。
[0101]
一种抗风扰可倾斜转子的八旋翼飞行器控制方法,以上所述飞行器的八个旋翼均为可倾斜旋翼;飞行器旋翼的驱动方式包括常规驱动形式、中间驱动形式和倾斜驱动形式;
[0102]
当飞行器旋翼工作于常规驱动形式时,各可倾斜旋翼的旋翼驱动轴8均与机身水平面垂直,以提供最长的续航时间;
[0103]
当飞行器旋翼工作于中间驱动形式时,以两对可倾斜旋翼转为倾斜姿态进行驱动,其余可倾斜旋翼的旋翼驱动轴按常规驱动形式与机身水平面保持垂直,以在提升飞行器抗风扰性能的同时兼顾飞行器的续航时间;
[0104]
当飞行器旋翼工作于倾斜驱动形式时,各可倾斜旋翼的旋翼驱动轴均与机身水平面保持相同的倾斜角进行工作,以使飞行器具有最佳的抗风扰性能和空间保持能力。
[0105]
所述可倾斜旋翼的旋翼可相对于机身水平面进行0度至31度范围的匀速倾斜调整,所述倾斜调整在5秒内完成;
[0106]
所述飞行器的飞控模块以机载风速检测装置实时获取环境中的风速信息,并根据风速信息自动调整可倾斜旋翼的驱动方式;当可倾斜旋翼的驱动方式由飞控模块自动调整时,
[0107]
若风速为0
‑
2.5m/s时,飞行器旋翼工作于常规驱动形式;
[0108]
若风速为2.5
‑
5m/s,或在此风速环境下仅偶然出现瞬时风速大于5m/s时,飞行器旋翼工作于中间驱动形式;
[0109]
若风速大于5m/s,飞行器旋翼工作于倾斜驱动方式。
[0110]
所述飞行器的飞行器模型为二维刚体模型;
[0111]
飞行器的运动方程为
[0112][0113]
其中,t、t
h
和m分别是垂直推力、水平推力和产生的力矩;多旋翼飞行器框架产生的空气动力和力矩由和m
areo
表示;
[0114]
驱动旋翼的电机转子产生的力和力矩以公式表述为
[0115][0116]
其中,c
t
是转子推力常数,ω
i
是转子的转速。注意,公式二中的因子2用于说明x
b
‑
z
b
平面的对称性;
[0117]
转子的运动方程以公式表述为
[0118][0119]
其中,v0是电机的标称电压,i0是空载电流,r是电机电阻,k
v
是电机速度常数,c
τ
是转子气动扭矩常数,j
rotor
是转子惯性。v
i
是电机i的输入电压,对于飞行器的动力控制,有以下公式:
[0120][0121]
其中v
t
是一个用于控制总体推力的电压命令,而v
m
生成一个俯仰力矩;
[0122]
对于飞行器的水平推力控制,电机的输入电压以公式表述为
[0123][0124]
其中是用于产生沿x
b
轴水平推力的电压指令;v1和v4中包含的附加项tan(22.5
°
)用于抵消电压指令产生水平推力分量时生成的俯仰力矩;
[0125]
作用在旋翼飞行器上的空气动力和力矩模型通过全尺寸四轴飞行器的风洞试验获得;将飞行器和旋翼的尺寸及旋翼的数量进行外推,可计算旋翼飞行器的空气动力和力矩;空气动力和力矩由下式给出:
[0126][0127]
其中ρ是空气的密度,a
prop
是螺旋桨的后掠面积,a
uav
是机翼的有效面积,是所有旋翼的平均速度,n
rotor
是旋翼的数量;
[0128]
设模型中的飞行器以完美控制器进行控制,使飞行器的表观风速和迎角不受飞行器运动的影响;
[0129]
所述旋翼飞行器的气动系数模型适用于
‑
180
°
~180
°
迎角范围,所述模型通过使用最小二乘优化将傅立叶级数拟合到实验测试的系数而获得,以公式表述为;
[0130][0131]
其中λ是叶尖速比,由下式给出:
[0132][0133]
参数a1和a2由下式给出:
[0134][0135]
出于对称性考虑,用于模拟和的函数必须是关于α=
‑
90
°
,+90
°
的奇函数;
[0136]
当计算时,假设旋翼飞行器关于x
b
‑
y
b
平面对称,即意味着和的函数也必须大约为α=0
°
;
[0137]
所述和的值在α=
‑
90
°
,+90
°
时必须为零;
[0138]
对于与相关的空气动力系数,在假设旋翼飞行器关于y
b
‑
z
b
和x
b
‑
z
b
平面对称的情况下,用于模拟这些系数的函数必须是关于α=
‑
90
°
,+90
°
的偶函数。
[0139]
实施例1:
[0140]
如附图4、附图5所示。三自由度电机的输出转子位于结构中心,输出轴直接与飞行器旋翼相连。我们结合位于输出转子周围的无刷直流执行器、力矩执行器,以及位于输出转子正下方的音圈执行器,共同为输出轴提供x、y两个方向的倾斜自由度。当三自由度电机进行倾斜操作时,输出转子会随着内部框架进行倾斜,最大倾斜角为45
°
。对倾斜过程的控制
取决于内置微型传感器(包括惯性测量单元、编码器和分解器),这使在5s内完成31
°
的旋翼倾斜或回正成为了可能,也使得八轴旋翼飞行器进行旋翼驱动方案的切换。另外,内部框架正下方的音圈执行器,还可以为输出转子提供回复力矩和磁场环境。
[0141]
实施例2:
[0142]
飞行器旋翼有三种驱动形式:
①
常规驱动形式,即旋翼的八个轴与水平面垂直。这种旋翼驱动方案续航最久,但提供的抗风扰能力最为有限。
②
中间驱动形式。两对旋翼倾斜驱动(倾斜角为31
°
),其余两对旋翼以常规形式驱动,不同驱动方案的旋翼毗邻排布。它兼顾了续航和抗风扰性能。若用户无额外设置飞行器驱动形式,将默认以这种方式运行。
③
倾斜驱动形式,即四对旋翼以共同的倾斜角31
°
进行工作。拥有最强的抗风扰性能和空间保持能力,适用于复杂风场条件下的飞行器运行。
[0143]
根据机载风速检测装置,八轴旋翼飞行器可以实时获取风速信息。在室内等稳定风速条件下(风速约为0
‑
2.5m/s),八轴飞行器默认以常规驱动形式运行;当处在风速较小的环境下(风速约为2.5
‑
5m/s,或偶然出现瞬时风速大于5m/s),默认以中间驱动形式运行;当处于风速较大的野外时(风速大于5m/s),默认以倾斜形式运行,它能够提供比常规驱动大一个数量级的驱动带宽。
[0144]
另外,用户设置优先级高于不同风速下的默认旋翼驱动方案。用户可在任意风速场景下,设置任意一种旋翼驱动形式(例如在0
‑
5m/s风速下,将旋翼设置为倾斜驱动形式,以获取更佳的抗风扰性能)。
[0145]
如附图2所示。依靠三自由度电机,八轴飞行器的每个旋翼,都可以同步实现从水平0
°
倾斜角位置到31
°
倾斜角位置的转换。出于稳定性考虑,这个过程会匀速进行,在5s内实现倾斜至水平位置或水平至倾斜位置。
[0146]
实施例3:
[0147]
本实用新型设计中,通过参数扫描过程用于为非倾斜旋翼飞行器选择部件和设计参数,以便进一步分析。
[0148]
考虑的参数包括电机和螺旋桨(转子)的组合、旋翼飞行器直径d
uav
、电池容量,以及在使用倾斜旋翼时转子的倾斜角β。参数扫描过程评估设计变量的组合,目的是找到结构最紧凑和响应最快的飞行器。总共评估了306个发动机/螺旋桨组合,以及0.5
‑
2.1m的飞行器直径和1
‑
89
°
的旋翼倾斜角(增量为2
°
)。对于被认为可行的设计,它们必须满足在特定时间内运载一定有效载荷、悬停状态下的油门设置条件、几何干扰条件以及产生足够推力以减轻预期阻力波动等约束条件。
[0149]
参数扫描产生一系列可行解,从这些可行解中使用帕累托排序来识别一组非支配解。即如果在一个度量中没有相应的折衷,在特定度量中不可能有任何改进的解。在确定了一套非主导解决方案后,设需要选择一个合适的设计,以在尺寸和响应性之间提供一个合适的折衷方案。
[0150]
最终选择了0.5m的飞行器直径,最大有效载荷为1kg,设计电池容量为8500mah,设计续航时间为20分钟。
[0151]
本实用新型所述飞行器之所以选择了31
°
的倾斜角,是因为在这个角度下,垂直升力、水平推力、转子力矩以及续航时间都达到了一个较高的数值,它们之间达到了很高的匹配度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1