一种无人机机翼驱动机构的制作方法
1.本实用新型属于倾转翼无人机领域,尤其涉及一种倾转翼的无人机机翼驱动机构。
背景技术:
2.倾转翼无人机属于螺旋桨式无人机和固定翼无人机的结合体,兼备螺旋桨式的垂直升降功能和固定翼式的高航速、大航程功能。倾转翼无人机的结构,包括机身,机身内设有机翼驱动机构,机身上水平横穿有与机翼驱动机构连接的转轴,机身的两侧均设有机翼,转轴的端部通过旋转机构连接机翼,旋转机构上设有螺旋桨,机身内还设有控制系统;控制系统通过机翼驱动机构控制转轴旋转,转轴通过机翼驱动机构带动机翼作一个方向上的转动,控制系统通过旋转机构带动机翼作另一个方向上的转动,机翼在一个方向和另一个方向转动配合实现万向转动,从而改变无人机的飞行姿态;控制系统控制螺旋桨的转速,从而控制无人机的飞行速度。如申请号201710783974.5的一种机翼两用式倾转翼无人机,就是上述倾转翼无人机中的一种。
3.现有的机翼驱动机构,包括具有自锁力的驱动电机(又称舵机),驱动电机的上设有主动齿轮,主动齿轮通过被动齿轮连接转轴,驱动电机通过主动轮和被动轮带动转轴在一个方向上转动,当无人机处于稳定平飞状态时,机翼状态保持不变,机翼受气流影响受力,具有转动趋势,机翼受力通过旋转机构、转轴、被动齿轮和主动齿轮传递到驱动电机,依靠驱动电机自身的锁紧力克服,也就是说,在无人机稳定平飞过程中,驱动电机长期受力,这就导致驱动电机易于损坏。驱动电机以自身的堵转扭矩提供自锁力,以工作电压6v,堵转扭矩 20kg.cm的驱动电机为例,使用寿命2800
‑
3500小时。而且,当无人机飞行高速飞行时,机翼受力很大,很有可能导致驱动电机的锁紧力不足,导致机翼状态发生改变,无人机的飞行姿态失控,从而引发飞行事故。
4.现有机翼驱动机构中的主动齿轮和被动齿轮(齿轮副)要求配合非常精准,否则机翼易于发生抖动,这就对加工和安装提出了很高的要求,从而使得现有机翼驱动机构的制造成本较高。
5.现有机翼驱动机构对使用环境要求较高,为防止灰尘进入齿轮副造成卡滞,需要在机翼驱动机构的外侧设置防尘箱罩,重量增加且导致风阻较大,使无人机的续航能力下降较多,还需要定期添加润滑油,维护较为麻烦。此外现有的机翼驱动机构仅当驱动电机与转轴距离较近的使用使用,适用范围较小。并且齿轮副为刚性连接,耐冲击能力和减震性较差,使得齿轮副易于出现轮齿折断、齿面点蚀、齿面磨损、齿面胶合以及塑性变形等问题,导致使用寿命也较短,以航空铝合金材质的齿轮副为例,使用寿命只有约10000小时。
6.因此,现有的无人机机翼驱动机构存在驱动电机易于损坏、易于引发飞行事故、风阻较大、维护较为麻烦、适用范围较小、使用寿命较短的缺陷。
技术实现要素:
7.本实用新型的目的在于,提供一种无人机机翼驱动机构。本实用新型具有驱动电机不易损坏、不易引发飞行事故、风阻较小、维护较为容易、适用范围较广、使用寿命较长的优点。
8.本实用新型的技术方案:一种无人机机翼驱动机构,包括固定在机身内的驱动电机,驱动电机输出端设有第一转杆,第一转杆通过长度可调的第二转杆连接第三转杆,第三转杆的端部设有用于与转轴连接的套环。
9.前述的无人机机翼驱动机构中,所述第二转杆的两端均设有螺纹,位于第二转杆两端的螺纹旋向相反,第二转杆的两端均螺接有螺套,其中一个螺套与第一转杆转动连接,另一个螺套与第三转杆转动连接。
10.前述的无人机机翼驱动机构中,所述的其中一个螺套通过第一轴承与第一转杆转动连接,所述的另一个螺套通过第二轴承与第三转杆转动连接。
11.前述的无人机机翼驱动机构中,所述第二转杆的中部向外侧鼓出形成多棱柱。
12.前述的无人机机翼驱动机构中,所述套环上设有开口,开口的两侧分别向外侧延伸形成第一连接部和第二连接部,第一连接部上设有台阶孔,所述第三转杆的端部抵接在台阶孔的底面上,第三转杆的端部向第二连接部延伸并与第二连接部螺接。
13.前述的无人机机翼驱动机构中,所述第三转杆上设有通槽,对应通槽处设有至少两个通孔,其中一个通孔内设有转销,第三转杆通过转销与第二转杆转动连接。
14.与现有技术相比,本实用新型通过第一转杆、第二转杆和第三转杆在驱动电机与转轴之间形成了四连杆机构,四连杆机构具备自锁能力,即当无人机稳定平飞时(此时机翼长向垂直于机身且机翼宽向与飞行方向保持平行),四连杆机构处于自锁状态,可防止转轴转动,从而避免驱动电机受力,驱动电机仅仅在工作时受力,即驱动电机仅仅在无人机改变飞行姿态时受力,从而极大的减少了受力时间,使得驱动电机不易损坏。以工作电压6v,堵转扭矩20kg.cm的驱动电机为例,使用寿命可延长至5000
‑
6000小时。由于四连杆机构可对转轴进行锁紧,且驱动电机的锁紧力也可额外的提供转轴以锁紧力,从而确保转轴在无人机稳定平飞时不会发生转动,从而无人机的飞行姿态不会改变,不易引发飞行事故。
15.本实用新型以多根连杆连接转轴与驱动电机的输出端,连杆的制造精度容易保证,制作难度低,安装难度低,配合要求也低,从而使得机翼驱动机构的制造成本较低。
16.本实用新型对使用环境要求较低,灰尘也不易进入到转杆之间,所以不需要防尘,不需要加装防尘箱罩,机翼驱动机构的重量降低且风阻较小,可提高无人机的续航能力。转杆的活动端为面接触式的低副连接,不易磨损,便于润滑,从而使得润滑油的添加周期极大的延长,使得维护较为容易。此外,本实用新型通过改变转杆的长度,可适应不同的驱动电机与转轴距离,适用范围较广。并且,多根转杆之间为柔性的转动连接,使得本实用新型的耐冲击能力和减震性较好,使得本实用新型的使用寿命较长,使用寿命15000
‑
20000小时。
17.因此,本实用新型具有驱动电机不易损坏、不易引发飞行事故、风阻较小、维护较为容易、适用范围较广、使用寿命较长的优点。
附图说明
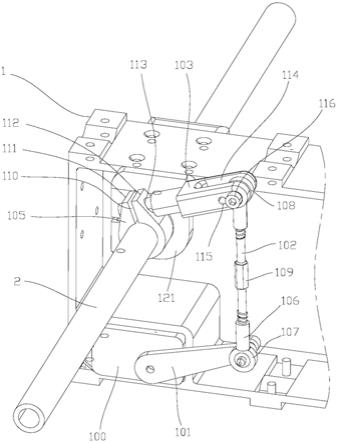
18.图1是本实用新型的结构示意图。
19.图2是本实用新型处于自锁状态下的示意图。
20.图3是四连杆机构的受力分析图。
21.附图中的标记为:1
‑
机身,100
‑
驱动电机,101
‑
第一转杆,102
‑ꢀ
第二转杆,103
‑
第三转杆,2
‑
转轴,105
‑
套环,106
‑
螺套,107
‑
第一轴承,108
‑
第二轴承,109
‑
多棱柱,110
‑
开口,111
‑
第一连接部,112
‑ꢀ
第二连接部,113
‑
台阶孔,114
‑
通槽,115
‑
通孔,116
‑
转销,117
‑ꢀ
第一连杆,118
‑
第二连杆,119
‑
第三连杆,120
‑
第四连杆,121
‑
轴套。
具体实施方式
22.下面结合附图和实施例对本实用新型作进一步的说明,但并不作为对本实用新型限制的依据。
23.实施例。一种无人机机翼驱动机构,如图1所示,包括固定在机身1内的驱动电机100,驱动电机100输出端设有第一转杆101,第一转杆101通过长度可调的第二转杆102连接第三转杆103,第三转杆103的端部设有用于与转轴2连接的套环105,转轴2通过轴套121 与机身1转动连接。
24.所述第二转杆102的两端均设有螺纹,位于第二转杆102两端的螺纹旋向相反,第二转杆102的两端均螺接有螺套106,其中一个螺套106与第一转杆101转动连接,另一个螺套106与第三转杆103 转动连接。
25.所述的其中一个螺套106通过第一轴承107与第一转杆101转动连接,所述的另一个螺套106通过第二轴承108与第三转杆103转动连接。
26.所述第二转杆102的中部向外侧鼓出形成多棱柱109。
27.所述套环105上设有开口110,开口110的两侧分别向外侧延伸形成第一连接部111和第二连接部112,第一连接部111上设有台阶孔113,所述第三转杆103的端部抵接在台阶孔113的底面上,第三转杆103的端部向第二连接部112延伸并与第二连接部112螺接。所述第三转杆103旋紧后,带动第一连接部111向第二连接部112靠拢, 从而使套环105夹紧在转轴2上。
28.所述第三转杆103上设有通槽114,对应通槽114处设有两个通孔115,其中一个通孔115内设有转销116,所述转销116是一根塞打螺钉,第三转杆103通过转销116与第二转杆102转动连接,转销116穿过第二轴承108。
29.工作原理:通过多棱柱109旋转第二转杆102,由于第二转杆102 两端的螺旋旋向相反,第二转杆102两端的螺套106相互靠近或相互远离,从而改变第二转杆102的长度。本实用新型上形成有四连杆机构,第一连杆117形成于转轴2与驱动电机100输出端之间、第二连杆118形成于驱动电机100输出端与第一轴承107之间、第三连杆 119形成于第一轴承107与第二轴承108之间、第四连杆120形成于第二轴承108与转轴2之间,通过改变第二转杆102的长度改变第三连杆119的长度,通过将转销116放置在不同的通孔115上改变第四连杆120的长度,从而使四连杆机构中的其中两根连杆的长度可调,确保。第一连杆形117的长度为d,第二连杆118长度为c,第三连杆119长度为b,第四连杆120长度为a,通过调整第三连杆119和第四连杆120的长度,使得a2+(b
‑
c)2=d2。
30.当无人机稳定平飞过程时,从无人机的侧向看,本实用新型状态如图2所示,其上的四连杆机构状态如图3所示,第四连杆120与第三连杆119垂直,第三连杆119与第二连杆
118共线。此时机翼迎风的受力传递到转轴2,使转轴2具有转动的趋势,转轴2带动第二轴承108具有绕转轴2转动趋势,由于第三连杆119与第二连杆118 共线,且驱动电机100位置固定,第二轴承10的转动趋势被克服,转轴2无法转动,从而实现自锁。
31.当无人机切换飞行姿态时,驱动电机100带动第二连杆118转动,第二连杆118依次通过第三连杆119和第四连杆120带动转轴2旋转,转轴2通过机翼驱动机构带动机翼作一个方向上的转动,实现飞行姿态的切换。
32.本实用新型与现有的机翼驱动机构的在结构上的区别在于,本实用新型通过多根依次铰接的转杆带动转轴2转动。现有的机翼驱动机构通过齿轮副带动转轴2转送。
33.本实用新型具有驱动电机不易损坏、不易引发飞行事故、风阻较小、维护较为容易、适用范围较广、使用寿命较长的优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1