一种固定翼旋翼混合飞行器的制作方法
1.本实用新型属于飞行器技术领域,具体涉及一种固定翼旋翼混合飞行器。
背景技术:
2.目前,在航空领域常见的固定翼飞行器,由于主要靠机翼产生升力平衡飞行器重量,动力系统主要用来克服飞行器飞行阻力,因此远小于飞行器重量的动力就可以让固定翼飞行器离地升空,其飞行速度比较快,航程和巡航时间也较长,但起降距离长,要求高质量的跑道,严重影响和妨碍了固定翼飞行器在偏远无专用机场地区的应用。而常见的多轴旋翼飞行器,可以解决在狭小场地垂直起降的问题,为此人们开始研发一种兼有固定翼飞行器和旋翼飞行器优点的飞行。
3.但是,目前大多数固定翼和旋翼结合的飞行器,固定翼与旋翼的简单结合导致该类飞行器还存在诸多缺点,例如现有的该类飞行器的电池舱设置于机身内,不利于大功率电池组的散热和更换等,又例如固定翼和旋翼结合之后不可更换,导致飞行器的使用范围较窄,不能灵活应对各类使用场景等;进一步优化固定翼和旋翼结合的飞行器使其具有更高的稳定性、使用范围更广泛、续航能力更强等优点是本领域技术人员亟需解决的问题。
技术实现要素:
4.本实用新型为了解决背景技术中所提出的技术问题,提供了一种固定翼旋翼混合飞行器。
5.本实用新型的技术方案为:
6.一种固定翼旋翼混合飞行器,包括:
7.机身,所述机身两侧对称设置有机翼,机身尾部设置有尾翼;
8.至少一组旋翼组件,每组所述旋翼组件包括两个分别挂载于两所述机翼下方的旋翼纵梁和两个对称设置于所述旋翼纵梁两端的旋翼模块,两所述旋翼纵梁对称设置;每个所述旋翼模块包括至少一个旋翼和用于驱动所述旋翼转动的第一驱动装置;
9.至少一组电池模块,用于为所述第一驱动装置供电;一组所述电池模块包括两电池模块,两所述电池模块对称的外挂于所述机身或者机翼上;
10.推进模块,包括螺旋桨和驱动所述螺旋桨转动的第二驱动装置;所述螺旋桨设置于所述机身上;
11.起落装置,设置于所述机身底部。
12.进一步优选的,所述电池模块吊挂于所述机翼下方。
13.进一步优选的,所述机翼包括翼梁和后墙,所述翼梁和所述后墙沿所述机翼的长度方向延伸设置,所述翼梁设置于所述机翼的最大厚度处。
14.进一步优选的,所述机翼上与所述旋翼纵梁对应的位置处设置旋翼纵梁加强肋,所述旋翼纵梁加强肋一端与所述翼梁连接,另一端与所述后墙连接。
15.进一步优选的,所述机翼下方设置有用于储放所述电池模块的吊舱,所述机翼上
与所述吊舱对应的位置处设置吊舱加强肋,所述吊舱加强肋一端与所述翼梁连接,另一端与所述后墙连接。
16.进一步优选的,所述吊舱和所述旋翼纵梁通过快拆结构可拆卸的吊挂于所述机翼下方。
17.进一步优选的,所述快拆结构包括:连接座,其具有一插口,所述连接座固定于所述机翼上;连接头,分别设置于所述吊舱和所述旋翼纵梁上,所述连接头与所述插口匹配,所述连接头插设于所述插口内,实现所述连接头的径向限位;径向插件,沿所述连接座径向插设于所述连接座和所述连接头,实现所述连接头的轴向限位;固定件,用于限制所述径向插件径向移动脱离所述连接座和所述连接头。
18.进一步优选的,所述快拆结构还包括加强框架,所述吊舱和所述旋翼纵梁周侧均围设有所述加强框架;所述连接头设置于所述加强框架上。
19.进一步优选的,所述径向插件和所述固定件均为插销结构。
20.进一步优选的,所述旋翼模块包括两个旋翼,两所述旋翼同轴设置于所述旋翼纵梁上,每个所述旋翼配备一所述第一驱动装置。
21.进一步优选的,设置两组所述旋翼组件,两组所述旋翼组件沿所述机翼的长度方向排布。
22.进一步优选的,设置多个所述电池模块,多个所述电池模块的重心与飞行器的平均重心位于同一竖向高度。
23.进一步优选的,还包括燃油动力装置和控制器;所述控制器和所述电池模块及所述燃油动力装置连接,所述控制器根据飞行器的飞行状态控制所述燃油动力装置和所述电池模块分别对应的为所述第二驱动装置和所述第一驱动装置供电。
24.进一步优选的,包括控制器和电力动力装置,所述电力动力装置至少包括所述电池模块,所述控制器控制所述电力动力装置分别为所述第一驱动装置、所述第二驱动装置供电。
25.进一步优选的,所述控制器包括机械操纵系统和自动驾驶系统;飞行员通过机械操纵系统操纵飞行器飞行;自动驾驶系统用于自动控制飞行器飞行。
26.进一步优选的,所述机翼设置于所述机身顶部或所述机身底部。
27.进一步优选的,所述旋翼组件和所述电池模块可拆卸安装;当安装有所述机翼组件和所述电池模块时构成固定翼旋翼结合的载人飞行器;当拆卸所述旋翼组件和所述电池模块时构成固定翼载人飞行器。
28.进一步优选的,安装有所述电池模块、所述旋翼组件时,飞行器载人后的总重量小于或等于飞行器的最大许可起飞重量。
29.本实用新型提供了一种固定翼旋翼混合飞行器,使其与现有技术相比具有以下的优点和积极效果:
30.本实用新型提供的一种固定翼旋翼混合飞行器,其创造性的将电池模块吊挂设置于机身或机翼外部,其优点在于:一、现有技术中将电池模块内置于机身内,需在机身内分别设置电池舱,占用机身内部本就局促的空间或通过加长机身提高飞行器内部空间,导致成本极大幅增加,且机身内部布置电池不利于电池的快速拆卸更换,而通过将电池外挂,则不需占用机身内部空间,也无需加长机身,避免增加飞行器的生产成本,同时在飞行器外部
即可直接更换电池模块,飞行器到达目的地后可直接更换备用电池,无需等待充电,有效提高工作效率;二、旋翼的第一驱动装置工作时电池高功率放电同时高功率放热,电池设置于机身内部不利于电池散热,为电池布置液冷系统又会增加重量并增加系统的复杂性;本实用新型通过将电池外挂,电池模块直接暴露于空气中,利用风冷提高电池模块的散热能力,当飞行器不航行时,电池可取出储放于室内,避免环境温度非常低时电池电量损耗严重,提高电池寿命,从而机身内部无需额外配备冷却系统和保温系统;三、机翼下挂载吊舱,电池模块的重力方向和机翼升力方向相反,能够抵消机翼的一部分气动弯矩,因此,机翼挂载重物后,其主传力构件强度反而过剩,无需进行额外补强,只需对吊舱所在的位置处设计吊舱加强肋传递集中载荷,且机身无增重代价;进一步的,电池模块的重心与飞行器的平均重心位于同一直线,使得的机身结构布局无需改变,大大降低了设计难度。
31.进一步的,在机翼下方挂载旋翼组件,旋翼组件可大幅提高机翼的升力,同时旋翼组件的重力与机翼升力方向相反,进一步的抵消机翼的弯矩载荷,机翼本身的主传力构件无需补强,只需在机翼上与旋翼组件对应的位置处设置旋翼加强肋进行局部补强,有效降低设计难度。
32.进一步的,在本实用新型中,旋翼组件和电池模块可拆卸且优选的飞行器为载人飞行器;当安装旋翼组件和电池模块时,构成固定翼和旋翼结合的载人飞行器;当拆卸旋翼组件和电池模块后,构成固定翼飞行器且该固定翼飞行器仍然可以载人,满足载人飞行器的适航标准及规范,扩大飞行器的应用范围。
33.进一步的,在本实用新型中,对应的机翼与其配套的尾翼可拆卸更换,根据不同最大起飞重量的应用场景,更换适配构型的机翼和尾翼,有效扩大飞行器的应用范围。
附图说明
34.结合附图,通过下文的述详细说明,可更清楚地理解本实用新型的上述及其他特征和优点,其中:
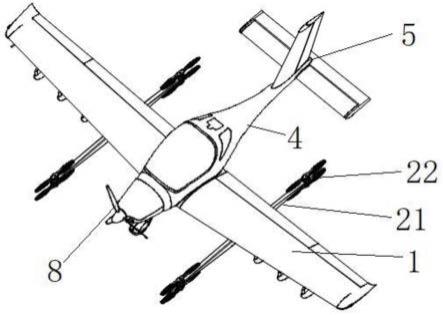
35.图1为本实用新型实施例1中的固定翼旋翼混合飞行器的示意图;
36.图2为本实用新型实施例1中固定翼旋翼混合飞行器的示意图;
37.图3为本实用新型实施例1中机翼结构的俯视示意图;
38.图4为本实用新型实施例1中储油腔位置处的左机翼横截面示意图;
39.图5为本实用新型实施例1中储油腔位置处的右机翼横截面示意图;
40.图6为本实用新型实施例1中旋翼组件位置处的左机翼横截面示意图;
41.图7为本实用新型实施例1中吊舱上的快拆结构的示意图;
42.图8为本实用新型实施例1中旋翼组件的结构示意图;
43.图9为本实用新型其他实施中固定翼旋翼混合飞行器的示意图;
44.图10为本实用新型其他实施例中固定翼飞行器的示意图。符号说明:
45.1-机翼;11-翼梁;12-后墙;13-旋翼纵梁加强肋;14-吊舱加强肋;15
‑ꢀ
油箱;16-密封肋;17-翼根中肋;18-襟翼;19-翼梁接头;110-油箱加强肋;
46.2-旋翼组件;21-旋翼纵梁;22-旋翼;23-第一驱动装置;
47.3-快拆结构;31-连接座;32-加强框架;33-连接头;34-径向插件;35
‑ꢀ
固定件;
48.4-机身;5-尾翼;6-起落装置;7-电池模块;8-螺旋桨;9-吊舱;
具体实施方式
49.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对照附图说明本实用新型的具体实施方式。显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
50.为使图面简洁,各图中只示意性地表示出了与本实用新型相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
51.参照图1-8,本实用新型提供了一种固定翼旋翼混合飞行器,包括:
52.机身4,机身4两侧对称设置有可拆卸的机翼1,机身4尾部设置有尾翼 5;
53.至少一组旋翼组件2,每组旋翼组件2包括两个分别设置于两机翼1上的旋翼纵梁21和两个对称设置于旋翼纵梁21两端的旋翼模块,两旋翼纵梁 21对称设置;每个旋翼模块包括至少一个旋翼22和用于驱动旋翼转动的第一驱动装置23;
54.至少一组电池模块,用于为第一驱动装置供电;一组电池模块包括两电池模块7,两电池模块7对称的外挂于机身或者机翼1上;
55.推进模块,包括螺旋桨8和驱动螺旋桨转动的第二驱动装置;螺旋桨设置于机身上;
56.起落装置6,设置于机身4底部。
57.本实用新型通过将固定翼及旋翼组件结合,在固定翼飞行器的基础上进行加装旋翼组件,形成固定翼和旋翼混合的飞行器,该飞行器兼具飞行速度比较快,航程和巡航时间较长且狭小场地垂直起降的优点。其中旋翼组件通过电池模块供电,其中电池模块挂载于机身外部或机翼下方。电池模块挂载于机身外部或机翼下方的优点在于:一、电池模块不需占用机身内部空间,也无需加长机身,避免增加飞行器的设计难度,同时在飞行器外部即可直接更换电池模块,飞行器到达目的地后可直接更换备用电池,无需等待充电,有效提高工作效率;二、通过将电池外挂,电池模块直接暴露于空气中,利用风冷提高电池模块的散热能力,当飞行器不航行时,电池可取出储放于室内,避免环境温度非常低时电池电量损耗严重,提高电池寿命,从而机身内部无需额外配备冷却系统和保温系统;
58.进一步的,参阅图1-3,在本实施例中,优选的电池模块7吊挂于机翼1 下方,此时电池模块7的重力方向和机翼1升力方向相反,能够抵消机翼的一部分气动弯矩,因此,机翼挂载重物后,其主传力构件强度反而过剩,无需进行额外补强,只需对吊舱所在的位置处设计吊舱加强肋传递集中载荷,且机身无增重代价;进一步的,电池模块的重心与飞行器的平均重心位于同一直线,使得的机身结构布局无需改变,大大降低了设计难度。当然在其他实施例中,电池模块也就挂载于机身外部的两侧。
59.其中,机翼指的是固定翼。
60.在本实施例中,具体的起落装置6为前三点式不可收放起落架,前轮可由脚蹬操纵实现地面转弯,主轮带有同步刹车。本实施例中的尾翼可以平尾或v型尾翼或其他构型的尾翼,此处不做限制。
61.在本实施例中,参阅图1,机翼1设置于机身底部,即为下单翼飞行器;当然在其他
实施例中,参阅图9,机翼1设置于机身顶部,即为上单翼飞行器。
62.在本实施例中,参阅图1-8,以下单翼型的轻型运动飞机为例具体阐述加装旋翼组件后飞行器的机翼结构设计,当然在其他实施例中,机翼的具体结构根据飞行器的构型不同相应的有所变化。
63.机翼1通常是由翼梁、纵墙、桁条、翼肋和蒙皮等构件组成。机翼的基本受力构件包括纵向(沿机翼长度方向)骨架、横向(沿气流方向垂直于翼梁方向)骨架和蒙皮。纵向骨架有翼粱、纵墙和桁条,横向骨架有普通翼肋和加强翼肋。在本实施例中,机翼采用单梁单墙式结构,其中机翼1包括翼梁11 和后墙(纵墙),翼梁11和后墙沿机翼1的长度方向延伸设置,的翼梁11 设置于机翼1的最大厚度处,翼梁用于传递机翼1弯矩和大部分剪力,后墙通过螺栓与机身连接,用于平衡扭矩;
64.在本实施例中,参阅图3,机身上具有用于插接翼梁11的翼梁隧道,翼梁11端部具有翼梁接头19,两翼梁11的翼梁接头插设于翼梁隧道内,两翼梁接头19通过连接件连接,使得左机翼1和右机翼1的弯矩在翼梁接头处互相抵消,仅对机身翼梁隧道传递正应力,机身底部无需承受弯矩,有利于减轻机身重量;同时,这种连接结构具有抗弯效率高,制造工艺要求低、便于拆装等优点。
65.在本实施例中,参阅图3,机翼1前缘和/或后缘设置有襟翼18,襟翼 18用于提高机翼1的升力,当飞机在起飞时,襟翼增加升力加速飞机起飞;当飞机在降落时,襟翼可以使飞机的升力和阻力同时加大,以利于降低着陆速度。
66.在本实施例中,参阅图3,机翼1上与旋翼纵梁21对应的位置处设置旋翼纵梁加强肋13,旋翼纵梁加强肋13一端与翼梁11连接,另一端与后墙12 连接。从而加装旋翼组件后,通过旋翼纵梁加强肋将旋翼组件的载荷传递到翼梁及后墙上,且旋翼组件的重力和空气对机翼的作用力相反,从而抵消了一部分气动载荷,使得传递到机身上的剪力、弯矩载荷变小,从而使得加装旋翼组件时无需对机身以及机翼主传力结构进行补强,只需在挂载有旋翼组件的位置设置旋翼纵梁加强肋,直接传递集中载荷并增加局部刚度,避免机翼局部受力过大使机翼蒙皮变形。
67.在本实施例中,参阅图3-6,机翼1下方设置有用于储放电池模块7的吊舱9,机翼1上与吊舱9对应的位置处设置吊舱加强肋14,吊舱加强肋14 一端与翼梁11连接,另一端与后墙12连接。通过吊舱加强肋将吊舱及电池模块的载荷传递到翼梁及后墙上,且电池模块及吊舱的重力和空气对机翼的作用力相反,从而抵消了一部分载荷,使得传递到机身上的载荷变小,从而无需对机身以及机翼主传力结构进行补强设计,降低成本,只需在挂在有吊舱的位置处设置吊舱加强肋,避免机翼局部受力过大。
68.进一步优选的,在本实施例中,参阅图6,吊舱9和旋翼纵梁21均通过快拆结构3可拆卸的吊挂于机翼1下方,实现吊舱、电池模块和旋翼组件的快速拆卸更换。当飞行器到达目的地时,可快速更换使用目的地的备用电池,无需等待充电,有效提高飞行器的工作效率。同样的,本实用新型中的旋翼组件通过快拆结构可实现可快速拆卸,根据应用场景不同,对应的选择固定翼飞行模式或固定翼旋翼结合的飞行模式。
69.进一步的,在本实施例中,参阅图7,快拆结构3包括:连接座31,其具有一插口,连接座31固定于机翼1上;连接头33,分别设置于吊舱9和旋翼纵梁21上,连接头33与插口匹配,连接头33沿着连接座轴向插设于插口内,实现连接头的径向限位;径向插件34,沿径向
插设于连接座31和连接头33上,实现连接头的轴向限位;固定件35,用于限制径向插件34径向移动脱离连接座和连接头,当然在其他实施例中,快拆结构的具体结构不局限于以上所述或图中所示,例如也可以是其他连接组件。
70.在本实施例中,径向插件和固定件均为插销结构,当然在其他实施例中,径向插件和固定件的具体结构不局限于以上所述,例如也可以是其他连接件或螺母、螺栓结构等。
71.进一步的,在本实施例中,吊舱9和旋翼纵梁21对应的快拆结构的结构及尺寸相同,从而两者的快拆结构通用,便于根据所需在适宜的位置挂载吊舱或旋翼组件。
72.进一步的,在本实施例中,快拆结构还包括加强框架,吊舱和旋翼纵梁周侧均围设有加强框架32,加强框架32沿吊舱9或旋翼纵梁21轴向延伸;加强框架用于提高快拆结构的强度;其中连接头设置于加强框架上。
73.在本实施例中,电池模块的重量可控制在25kg左右,单人即可独立快速的完成电池模块的更换。
74.在本实施例中,设置多个电池模块7,优选的多个电池模块7的重心与飞行器的平均重心位于同一竖向位置,使得在挂载电池模块时飞行器重心的不存在竖直方向上的移动。
75.在本实施例中,参阅图8,旋翼模块包括两个旋翼22,两旋翼22上下同轴设置于旋翼纵梁21上,形成共轴式双旋翼的方式,共轴双旋翼的方式使得每个螺旋桨模块的总功率更大,且体积小,结构紧凑、重量效率高;有利于提高飞行器的垂直升力;其中每个旋翼配备一第一驱动装置。
76.在本实施例中,对旋翼组件设置的组数不做限制,例如可以设置两组旋翼组件,且两组旋翼组件沿机翼的长度方向排布;当然也可以设置三组或四组旋翼组件;根据飞行器机型设置适量的旋翼组件,有利于提高飞行器的垂直升力且确保旋翼组件之间的气流流动不存在相互影响。
77.在本实施例中,固定翼旋翼混合飞行器还包括燃油动力装置和控制器;控制器和电池模块及燃油动力装置连接,控制器根据飞行器的飞行状态控制燃油动力装置为第二驱动装置提供动力,并且控制电池模块为第一驱动装置提供动力,即该固定翼旋翼混合飞行器采用燃油动力系统和基于电池模块的电力动力系统相结合的动力系统,其中燃油动力装置为飞行器的推进模块及其他用电设备供电,而电池模块用于为旋翼组件提供旋翼旋转的动力。
78.具体的,在飞行器垂直起飞前,控制器控制燃油动力装置的燃油发动机提前预热,将对应的滑油系统增温到规定值后发动机处于怠速旋转状态或关闭状态;接着控制器控制电池模块为第一驱动装置提供动力,驱动旋翼旋转直至飞行器垂直上升到安全高度以上,空中启动燃油发动机并由控制器控制飞行器缓慢加速,随着飞行速度增大,机翼的升力逐渐增大,旋翼转速逐渐降低,直到机翼升力完全取代旋翼升力,旋翼停止转动。在飞行器从平行飞行状态转换至垂直降落状态前,必须保证足够的飞行高度,飞行员收油门到慢车转速,减速到最佳滑翔速度,此时控制器控制电池模块为旋翼组件提供动力,旋翼转动,机翼升力逐渐升高直至取代机翼升力,实现飞行器的悬停或垂直降落。
79.当然在其他实施例中,固定翼旋翼混合飞行器的动力全部来源于电力动力系统,控制器控制电力动力装置为第一驱动装置、第二驱动装置供电,其中第二驱动装置的发动
机为电动发动机。电力动力系统的动力来源于以上所述的电池模块和/或额外设置的电池组,无需设置燃油动力装置。
80.进一步的,在本实施例中,机翼翼根带有结构油箱,油箱15设置于翼梁和后墙之间,燃油平均重心位于飞机器重心沿机身纵向略后的位置,随着燃油逐渐消耗,燃油重心沿机身纵向略微前移,能够保证飞机不会随着飞行重量的减轻而更加敏捷,避免增加操纵负担。
81.乘员登机时会踩踏翼根,对油箱15施加压力,从而在本实施例中,优选的在油箱中部设置有油箱加强肋;且沿机翼1的长度方向,油箱两侧分别设置密封肋16,加强油箱15的密封。
82.进一步的,在本实施例中,参阅图3,位于机翼1的翼根处的密封肋16 为翼根中肋,简化结构,同时翼根中肋位于翼梁和后墙之间,将载荷传递至翼梁和后墙上。
83.进一步的,参阅图4、5,翼梁11为c形梁,机身一侧的c型梁的开口朝向机翼1的前缘;机身另一侧的c型梁的开口朝向机翼1的后缘,使左右机翼的结构油箱的纵向宽度基本一致。
84.在本实施例中,固定翼旋翼混合飞行器的控制器包括有机械操纵系统和自动驾驶系统。在固定翼飞行模式中,飞行员主要通过机械操纵系统驾驶飞机,控制飞行器在固定翼飞行模式下在跑道上按正常程序预热、滑跑起飞、着陆,确保飞行安全。而自动驾驶模式主要用于完成飞行模式的转换,在长距离飞行中也可选用自动驾驶模式,减小飞行员的操纵负担。当然自动驾驶系统工作中,机械操纵系统的权限大于自动驾驶的权限,机械操纵系统可干预中断自动驾驶系统快速转换至机械操纵模式,确保飞行员可及时应对突发情况。
85.进一步优选的,在本实施例中,不同构型的机翼1配备对应构型的尾翼,机翼1和尾翼配套更换。例如针对于最大起飞重量700kg的轻型运动飞机,通过更换配套的机翼和尾翼,可使飞机变成最大起飞重量为600kg的轻型运动飞机,最大起飞重量为600kg构型的飞机需换装较小的机翼。根据应用场合适配对应机翼和尾翼,灵活变化机型,使用范围更广。其中需注意的是,不同构型之间的机翼尾翼与机身的接口相匹配,确保不同构型的机翼尾翼可换装于同一机身上。
86.在本实施例中,优选的飞行器为载人飞行器,且旋翼组件2和电池模块 7可拆卸安装;参阅图1,当安装有旋翼组件和电池模块时,飞行器构成固定翼和旋翼结合的载人飞行器;当然在其他实施例中,参阅图10,拆卸旋翼组件和电池模块以及对应的电池吊舱后,飞行器构成固定翼飞行器,值得注意的是,该固定翼飞行器仍然可载人。可根据使用需求选择合适的构型,扩大飞行器的应用范围。
87.在本实用新型中,无论旋翼组件和电池模块是否安装,均需确保构成的飞行器均可载人,均满足载人飞行器的适航审定标准,从而本实用新型通过对机身进行减重设计,降低飞行器的空机重量;进一步的考虑到加装旋翼组件后飞行器承受的气动载荷增大,从而初始设计时对机身及机翼(即固定翼) 进行补强设计,以确保飞行器强度满足两种构型转换下仍能满足载人要求。
88.进一步的,在本实用新型中,安装电池模块、旋翼组件时,飞行器载人后的总重量仍然小于或等于飞行器的最大许可起飞重量,确保该飞机在任何构型下满足载人飞机的适航标准。
89.进一步优选的,在本实施例中,以上所述的固定翼载人飞行器为轻型运动类飞机,其现有的多轴旋翼固定翼载人飞机不属于轻型运动类飞机的范畴,其无法按照现有的轻型运动飞机标准设计,无法保证现有的多轴旋翼固定翼载人飞机能够满足轻型运动飞机或超轻型飞机的适航审定标准,缺乏适航依据,航行安全无法得到法律保障。而本实施例中优选的将以上所述的固定翼旋翼结合的载人飞行器和固定翼载人飞行器的最大许可起飞重量控制在民航局航空器适航审定司所定义轻型运动类航空器的最大起飞重量内,其中固定翼载人飞行器属于轻型类运动飞机,可完全按照《关于修改轻型运动类航空器定义和发布轻型运动直升机技术标准的通知》设计,使得固定翼载人飞行器满足载人以及适航条件;在此基础上加装旋翼组件和电池模块,使得载人后的固定翼旋翼结合的载人飞行器的总重量仍然不超过其最大许可起飞重量,仍然满足《轻型运动飞机设计和性能标准》,不存在适航障碍。例如,本实用新型中提供一种lsa700构型的飞机(即最大起飞重量为700kg的轻型运动类飞机),其加装旋翼组件和电池模块后,从lsa700构型转换为固定翼旋翼结合的飞机,机翼挂载旋翼组件及电池模块降低了机翼的弯矩载荷,从而无需对本实用新型中的lsa700构型的飞机进行额外改进,lsa700构型的机身和机翼的强度以及载荷仍然满足现有的《轻型运动飞机设计和性能标准》,降低设计难度,且具有适航依据,合乎法律标准,确保飞行安全。
90.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于上述实施方式。即使对本实用新型作出各种变化,倘若这些变化属于本实用新型权利要求及其等同技术的范围之内,则仍落入在本实用新型的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1